slam2专题

SLAM ORB-SLAM2(29)PnP估计姿态
SLAM ORB-SLAM2(29)PnP估计姿态 1. PnP问题2. EPnP算法2.1. 计算4对控制点的世界坐标2.2. 计算齐次质心坐标2.3. 计算4对控制点的相机坐标2.3.1. 构造M矩阵2.3.2. 计算 M T M M^TM MTM的0特征值对应的特征向量2.3.3. 计算零空间的秩2.3.4. 计算线性组合的系数 2.4. 选择最小重投影误差 3. 标题

orb_slam2 install遇到问题
3.1../build.sh出错 error: make[2]: * No rule to make target /home/szm/Pangolin/build/src/libpangolin.so', needed by../lib/libORB_SLAM2.so’. Stop. 解决: git clone https://github.com/stevenlovegrove/Pan
ORB_SLAM2安装以及使用说明
首先要安装ORB_SLAM2 https://github.com/raulmur/ORB_SLAM2 一开始在服务器上装 没有sudo权限 各种装不好。。。很烦 比如eigen glew各种装不好 find_package找不到 折腾了很久 于是选择在本地跑。。。 之前遇到一些坑 在本地跑的时候 遇到需要装的依赖 装起来就比较快了 然后就运行起来了 运行的时候数据的路径也要准确 比

动态SLAM:ORB-SLAM2+YOLOv8
动态SLAM:基于ORB-SLAM2与YOLOv8剔除动态特征点(三种方法)_orbslam+yolo-CSDN博客 动态SLAM:ORB-SLAM2+YOLOv8-seg
Windows下搭建ORB_SLAM2
(一)Orbslam2的安装: 大佬已经改好的windows版,方便实用,安装步骤非常清晰,按着一步步来就可以啦 https://github.com/phdsky/ORBSLAM24Windows 但是! 唯一需要注意的一点就是在安装Pangolin时,CMakeList里人家写了自动从github上下载并安装glew,libpng,libjpg三个库。 所以我们需要自己在win
ORB-SLAM2运行自己的数据集
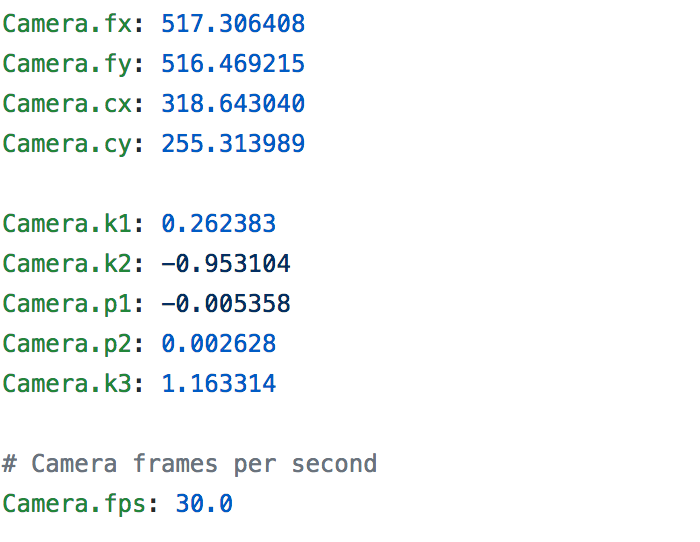
ORB-SLAM2运行自己的数据集 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ 一、生成数据集 1.生成图片 搭建好ORB-SLAM后,可以跑自己的数据进行实验了。首先进行数据准备。我这里是通过摄像头采集到的视频。先要将视频处理成一帧一帧的图片,如果采集来的

ORB-SLAM2搭建详细过程
ORB-SLAM2搭建详细过程 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ ORB-SLAM是15年一个西班牙博士做的[1],工程效果来看,是目前最好的了。ORB-SLAM是针对单目做的slam,最新的是ORB-SLAM2,支持单目、双目和RGB-D接口。这里对
ORB-SLAM2详解(六)闭环检测
ORB-SLAM2详解(六)闭环检测 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ 毋庸置疑的是,随着相机的运动,我们计算的相机位姿,三角化得到的点云位置,都是有误差的,即使我们使用局部的或全局的BA去优化,仍然会存在累积误差。而消除误差最有效的办法是发现闭环,并根
ORB-SLAM2详解(五)局部建图
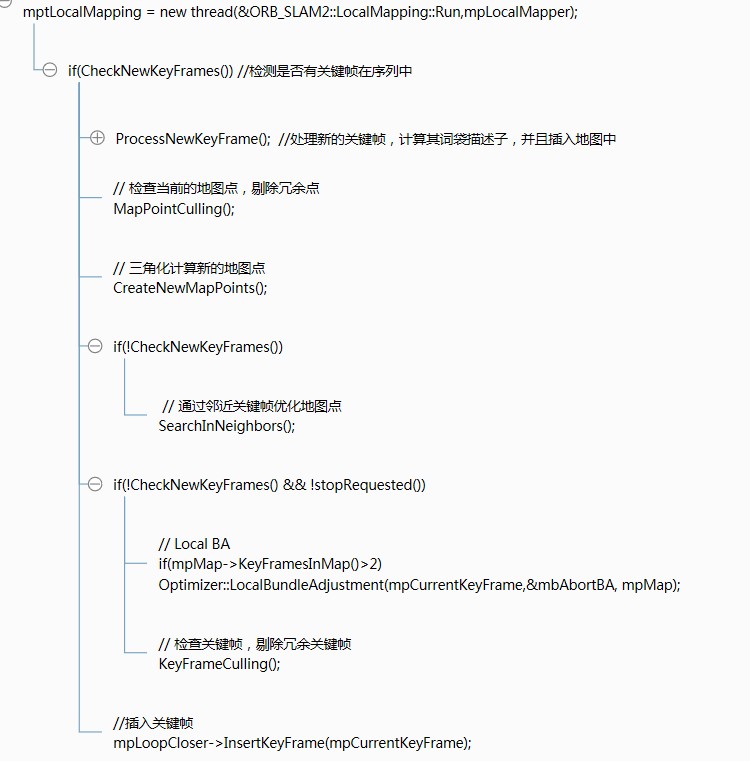
ORB-SLAM2详解(五)局部建图 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ 在之前的Tracking中,我们得到了新的关键帧Ki。如下图所示,Local Mapping这部分 包括插入关键帧,剔除冗余的地图点和关键帧,还有进行局部集束调整。接下来按照顺序介绍
ORB-SLAM2详解(四)跟踪
ORB-SLAM2详解(四)跟踪 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ 这一部分是ORB_SLAM系统中最基本的一步,会对每一帧图像进行跟踪计算。Tracking线程运行在主线程中,主要思路是在当前帧和(局部)地图之间寻找尽可能多的对应关系,来优化当前帧的位
运行ORB-SLAM2(单目+AR)遇到的问题
1. 在运行实时单目时(单目相机的实时图像作为输入数据) 需要在systerm.h的文件头加上#include <unistd.h>,,并且在ros_mono.cc,ros_mono_ar.cc(这个在该文件夹的AR文件夹里面)将 ros::Subscriber sub = nodeHandler.subscribe("/camera/image_raw", 1,&ImageGrabber::G
SLAM ORB-SLAM2(22)分解基础矩阵
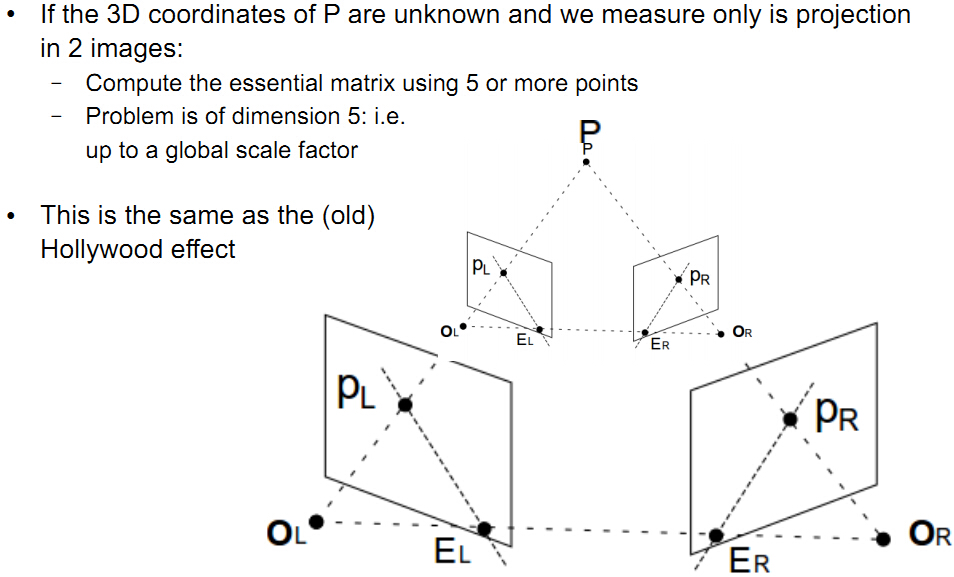
SLAM ORB-SLAM2(22)分解基础矩阵 1. 前言2. 推导2.1 本质矩阵2.2 分解本质矩阵2.3 几何意义 3. ReconstructF3.1. 分解 Rt3.2. 三角化测量3.3. 选择最优解 4. DecomposeE 1. 前言 在 《SLAM ORB-SLAM2(12)估算运动并初始地图点》 中了解到 估算两帧间相对运动过程: 记录特征点对的匹配关
SLAM ORB-SLAM2(24)地图点投影匹配
SLAM ORB-SLAM2(24)地图点投影匹配 1. 前言2. SearchByProjection2.1. 创建角度直方图2.2. 判定相机的运动方向2.3. 计算地图点像素坐标2.4. 设定搜索搜索窗口的大小2.5. 计算描述子的距离,评价特征点的匹配度2.6. 筛选最佳匹配点2.7. 角度一致性筛选 1. 前言 在《SLAM ORB-SLAM2(23)运动模型跟踪

ORB-SLAM2实践
1.环境搭建 ubuntu18.04下进行依赖库安装,流程大致如下,先有个大致认识: Pangolin----OpenCV----Eigen----ORB_SLAM2 Opencv及Eigen已安装,这里不重复记录,详见VINS-MONO实践 配置前需要下载cmake、gcc、g++和Git工具。 下载cmake 1 sudo apt-get install cmake 下载git
SLAM ORB-SLAM2(20)查找基础矩阵
SLAM ORB-SLAM2(20)查找基础矩阵 1. 前言2. FindFundamental3. 特征点坐标进行归一化4. 选择归一化之后的特征点5. 八点法计算基础矩阵6. 评分并评优 1. 前言 在 《SLAM ORB-SLAM2(12)估算运动并初始地图点》 的 2.3. 计算H矩阵和F矩阵过程 中 /* 构造线程来计算H矩阵和F矩阵及其得分 */thread

动态SLAM:基于ORB-SLAM2与YOLOv8剔除动态特征点(三种方法)
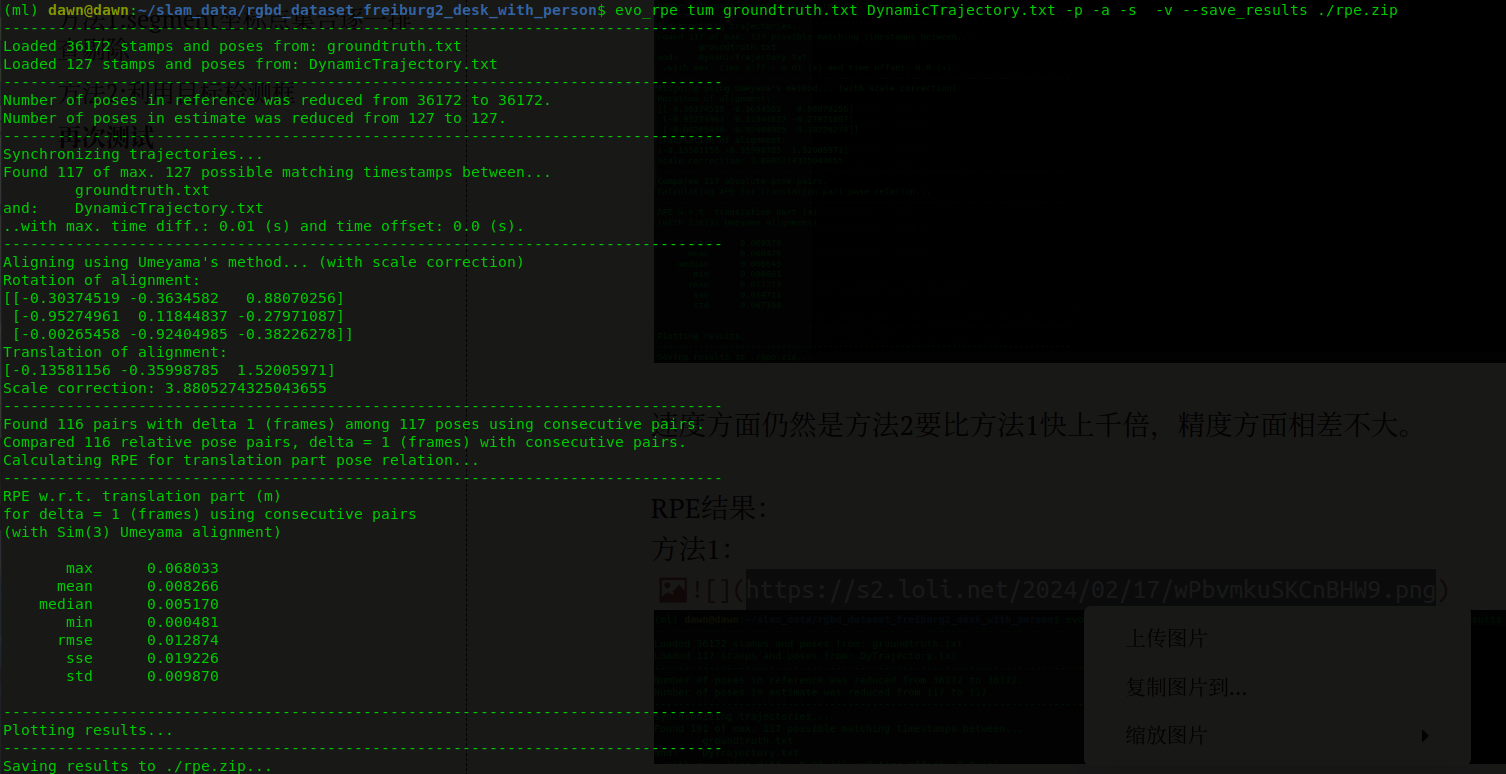
基于ORB-SLAM2与YOLOv8剔除动态特征点(三种方法) 写上篇文章时测试过程比较乱,写的时候有些地方有点失误,所以重新写了这篇 本文内容均在RGB-D环境下进行程序测试 本文涉及到的动态特征点剔除速度均是以https://cvg.cit.tum.de/data/datasets/rgbd-dataset/download#freiburg3_walking_xyz数据进行实验 方法1
基于ORB-SLAM2与YOLOv8剔除动态特征点(三种方法)
基于ORB-SLAM2与YOLOv8剔除动态特征点(三种方法) 写上篇文章时测试过程比较乱,写的时候有些地方有点失误,所以重新写了这篇 本文内容均在RGB-D环境下进行程序测试 本文涉及到的动态特征点剔除速度均是以https://cvg.cit.tum.de/data/datasets/rgbd-dataset/download#freiburg3_walking_xyz数据进行实验 方法1
基于ORB-SLAM2与YOLOv8剔除动态特征点
基于ORB-SLAM2与YOLOv8剔除动态特征点 以下方法以https://cvg.cit.tum.de/data/datasets/rgbd-dataset/download#freiburg3_walking_xyz数据集进行实验测试APE 首先在不剔除动态特征点的情况下进行测试: 方法1:segment坐标点集合逐一排查剔除 利用YOLOv8的segment获取动态对象(这里指人

rospack found package “...ORB_SLAM2...“ at ““, but the current directory is“...“
运行某个版本SLAM报错,多个SLAM版本通用: 首先,检查ros环境路径是否是错的,要和current directory对应 echo $ROS_PACKAGE_PATH Traceback (most recent call last): File “/opt/ros/kinetic/share/ros/core/rosbuild/bin/check_same_directories.

ORB_SLAM2编译出现问题(ros机器人开发实践p254)
建议按照这篇文章走一遍,应该可以编译成功 https://blog.csdn.net/u013019296/article/details/70052027 然后在: ./build_ros.sh 出现错误: 错误1 Building ROS nodes mkdir: cannot create directory ‘build’: File exists [rosbuild] Buildi
Ubuntu18.04 ORB-SLAM2运行TUM数据集
首先默认已配置ROS与ORB-SLAM2环境 1、ORB-SLAM2的安装位置为:/home/csim/catkin_ws/src/ORB_SLAM2 2、TUM数据集的所在位置为: /home/csim/ren/data/TUM/rgbd_dataset_freiburg1_xyz 3、运行TUM数据集分为:单目示例运行、双目示例运行与深度示例运行,其中深度示例运行需要使用python脚
ORB SLAM2 编译
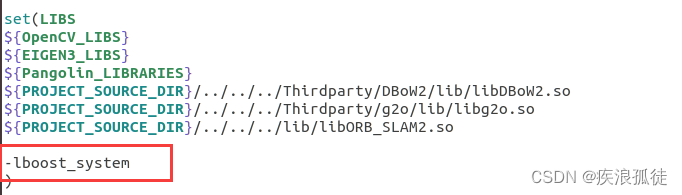
文章目录 软件版本编译编译自动编译手动编译 软件版本 Pangolin0.6opencv3.4.0 ORB SLAM2 编译 # 更改Opencv依赖版本与添加Pangolin依赖# CMakelist.txt更改LIST(APPEND CMAKE_PREFIX_PATH /usr/local/opencv-3.4) # 添加LIST(APPEND CMAKE_PRE
SLAM ORB-SLAM2(16)奇异值分解
SLAM ORB-SLAM2(16)奇异值分解 1. 特征分解2. SVD的定义3. SVD的分解3.1. 右奇异向量3.2. 左奇异向量3.3. 奇异值矩阵 4. 分解举例4.1. 构建方阵4.2. 特征分解4.2.1. 求特征值4.2.2. 求特征向量 4.3. 求奇异值4.4. 奇异值分解 5. 几何意义5.1. 奇异值矩阵
SLAM ORB-SLAM2(15)单应矩阵的计算和评分
SLAM ORB-SLAM2(15)单应矩阵的计算和评分 1. 前言2. 单应矩阵2.1. 概念2.2. 推导2.3. 计算原理 3. ComputeH213. CheckHomography 1. 前言 在 《SLAM ORB-SLAM2(13)查找单应矩阵》 中了解到 查找单应矩阵主要过程: 特征点坐标归一化 Normalize 函数 Normalize 参考 《
SLAM ORB-SLAM2(14)特征点坐标归一化
SLAM ORB-SLAM2(14)特征点坐标归一化 1. 前言2. Normalize3. 求均值4. 求平均差5. 尺度归一化6. 归一化矩阵 1. 前言 在 《SLAM ORB-SLAM2(13)查找单应矩阵》 中了解到 计算单应矩阵主要过程: 特征点坐标归一化 Normalize选择归一化之后的特征点八点法计算单应矩阵 ComputeH21评分并评优 CheckHo
ORB-SLAM2在windows10+vs2017
最近导师要带本科生毕设,询问我能不能把ORB-SLAM的项目在window10上运行,最好能接上自己的外设,单目双目啥的,那就开始搞吧。 首先下载源代码:(https://github.com/phdsky/ORBSLAM24Windows.git) 然后看里面的说明文档。 开始编译安装各种库和依赖项: 一、camke 我安装的是cmake-3.13.0,如何安装百度一下,很多大神有讲,而且很详细