本文主要是介绍ORB-SLAM2详解(五)局部建图,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ORB-SLAM2详解(五)局部建图
本人邮箱:sylvester0510@163.com,欢迎交流讨论,
欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/
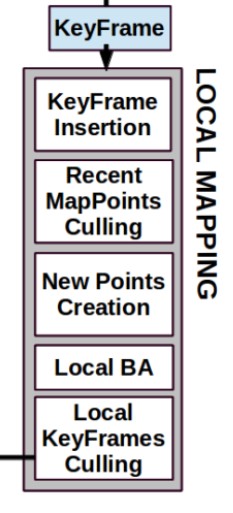
在之前的Tracking中,我们得到了新的关键帧Ki。如下图所示,Local Mapping这部分 包括插入关键帧,剔除冗余的地图点和关键帧,还有进行局部集束调整。接下来按照顺序介绍各部分。
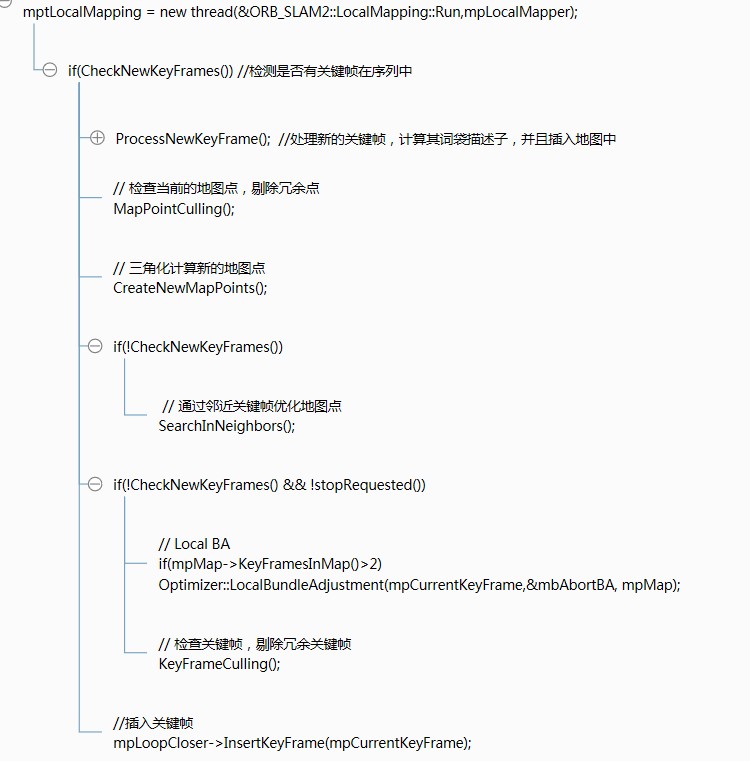
这一部分通过之前实例化SLAM系统对象时,实例化了一个LocalMapping的对象,并且开启一个线程,运行LocalMapping::Run()函数。整个代码逻辑如下:
一、关键帧插入
首先将新的关键帧Ki作为新的节点Ki加入Covibility Graph,并且更新与那些能够共享地图点的关键帧节点相连接的边。同时更新关键帧Ki的生长树,并计算表示关键帧的词袋BOW。这一部分的接口是在LocalMapping.cc中的
这篇关于ORB-SLAM2详解(五)局部建图的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






