建图专题

无人叉车3d激光slam多房间建图定位异常处理方案-墙体画线地图切分方案
墙体画线地图切分方案 针对问题:墙体两侧特征混淆误匹配,导致建图和定位偏差,表现为过门跳变、外月台走歪等 ·解决思路:预期的根治方案IGICP需要较长时间完成上线,先使用切分地图的工程化方案,即墙体两侧切分为不同地图,在某一侧只使用该侧地图进行定位 方案思路 切分原理:切分地图基于关键帧位置,而非点云。 理论基础:光照是直线的,一帧点云必定只能照射到墙的一侧,无法同时照到两侧实践考虑:关
poj 3181 网络流,建图。
题意: 农夫约翰为他的牛准备了F种食物和D种饮料。 每头牛都有各自喜欢的食物和饮料,而每种食物和饮料都只能分配给一头牛。 问最多能有多少头牛可以同时得到喜欢的食物和饮料。 解析: 由于要同时得到喜欢的食物和饮料,所以网络流建图的时候要把牛拆点了。 如下建图: s -> 食物 -> 牛1 -> 牛2 -> 饮料 -> t 所以分配一下点: s = 0, 牛1= 1~

用python fastapi写一个http接口,使ros2机器人开始slam toolbox建图
如果你想使用Python的FastAPI框架编写一个HTTP接口,以便通过接口启动ROS 2机器人的SLAM Toolbox建图,可以按照以下方式进行: 首先,确保你已经安装了fastapi和uvicorn库。你可以使用以下命令进行安装: pip install fastapi uvicorn 接下来,创建一个Python文件(例如app.py),并将以下代码添加到文件中: import

RoadLib---这两年值得一看的建图定位项目
0. 简介 好久都没有看到比较条理清晰的开源项目了,这个项目目前看来有作为记忆行车这类比较火的项目的前提。虽然特征比较少,但是作为建图和定位来说还是基本可以胜任的。这一篇文章我们将着重来看一下整个代码的逻辑,相关的代码注释以及详细内容已经在Github上开源了。由于作者能力有限,欢迎大家一起来讨论 轻量级道路特征地图(开源了) 1. RoadLib之roadlib.h
HDU 2548Kindergarten (最大独立集 + 建图细节)
题意:有男孩,女孩两个集合,男孩都相互认识,女孩也都相互认识, 现在找出最多的人,他们之间都是相互认识的,如果按题目给的男孩认识女孩的关系建立图,那么就是求极大完全子图,无法做,所以反过来思考 把不认识的人建立关系,求最大独立集。 #include<cstdio>#include<iostream>#include<algorithm>#include<cmath>#include

Poj 2049 Finding Nemo(建图+BFS)
先把DP放一放,开始刷Poj上的图论。从基础走起。。 http://poj.org/problem?id=2049 题意:给一个map,它包含墙,门及空地。输入n,m分别代表墙的个数及门的个数。 对于墙,输入x,y,d,t,(x,y)是墙的左下角的坐标;d = 1平行y轴,d=0平行x轴;t代表墙延伸的长度。 对于门,输入x,y,d,(x,y)是门的左下角坐标,d同上,因为门的长度始

Gazebo Harmonic gz-harmonic 和 ROS2 Jazzy 思考题 建图和导航 SLAM Navigation
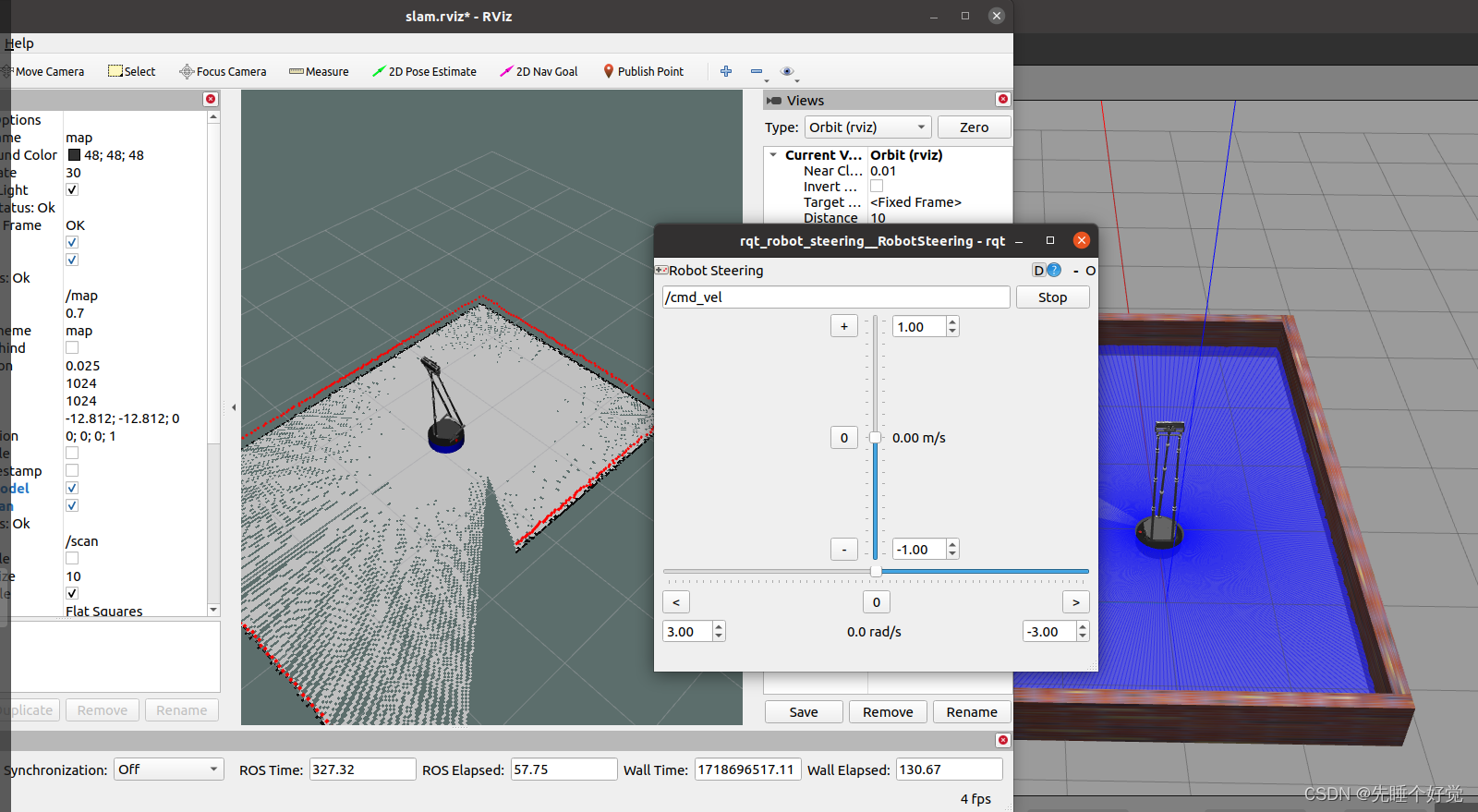
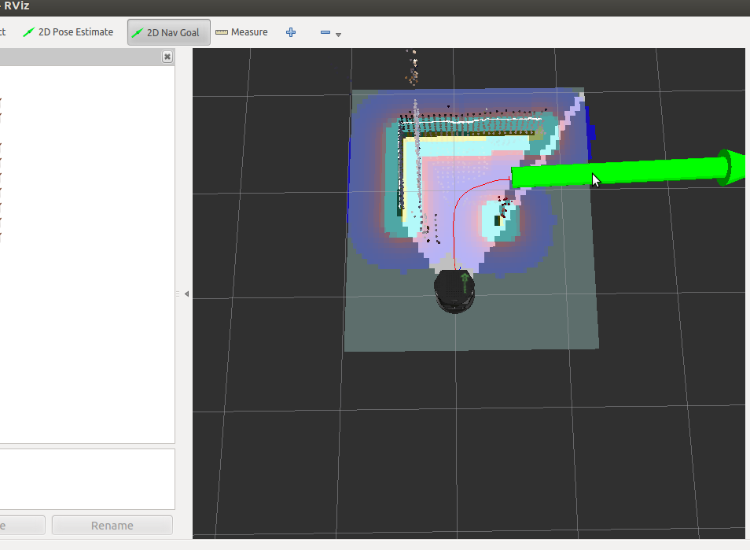
仿真 效果还挺好的。 SLAM建图 导航 …… 提示 这篇文档详细介绍了如何在ROS 2环境中使用SLAM(Simultaneous Localization and Mapping,即同时定位与地图构建)和Nav2(Navigation 2,ROS 2的导航框架)来让机器人一边构建环境地图一边进行导航。以下是对该文档的详细总结: 概述 文档主要面向ROS 2用户
2-sat建图以及刷题记录~~
A[x] NOT A[x] A[x] AND A[y] A[x] AND NOT A[y] A[x] OR A[y] A[x] OR NOT A[y] NOT (A[x] AND A[y]) NOT (A[x] OR A[y]) A[x] XOR A[y] NOT (A[x] XOR A[y]) A[x] XOR NOT A[y] 建立有向图。 若图中存在有向边i->j,则
ROS学习记录:launch文件启动Hector_Mapping的建图功能
前言 SLAM软件包Hector_Mapping 在上一篇笔记中,通过Hector_Mapping软件包实现了SLAM功能,运行了四条指令,有些麻烦。本文通过launch文件的使用将指令整合起来,方便功能的实现。 一、打开终端,输入cd catkin_ws1/src/,进入工作空间的src目录。 二、输入catkin_create_pkg slam_pkg roscpp rospy st

视觉SLAM十四讲:从理论到实践(Chapter12:建图)
前言 学习笔记,仅供学习,不做商用,如有侵权,联系我删除即可 一、主要目标 1. 理解单目SLAM中稠密深度估计的原理。 2. 通过实验了解单目稠密重建的过程。 3. 了解几种RGB-D重建中的地图形式。 构建的地图也有多种功能分类: 二、单目稠密重建 使用极限搜索和块匹配技术 有多种计算方法,其中常用的算法是NCC:

解读《视觉SLAM十四讲》,带你一步一步入门视觉SLAM—— 第 13 讲 建图
这一讲拖到现在才开始写,其中一个主要的原因是建图部分的内容,一方面比较难,另一方面它在实际的工程中应用较少,我对这方面的了解不是特别深入。 工程中很少对视觉构建的地图进行复用,其原因主要有(来自我自己的经验): ① 地图的精度较低,多数难以达到导航和定位的要求;② 视觉对光线比较敏感,构建的地图难以较好复用,有时早上建图,下午定位成功率就很低;③ 地图体积大,内存占用率高。视觉slam会维护一
ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航
ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航 ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航 说明 介绍如何使用turtlebot通过rtabmap_ros进行建图和导航 安装相关包: Kinetic $ sudo apt-get install ros-kinetic-turtlebot-bringup r
ROS2+TurtleBot3+Cartographer+Nav2实现slam建图和导航
0 引言 入门机器人最常见的应用就是slam建图和导航,本文将详细介绍这一流程, 便于初学这快速上手。 首先对需要用到的软件包就行简单介绍。 turtlebot3: 是一个小型的,基于ros的移动机器人。 学习机器人的很多示例程序都是基于turtlebot3。 Cartographer: 是一个流行的slam建图工具包。 Nav2: 是一个流行的导航工具包。 gazebo: 是一个基于ros的物
A-loam建图算法
A-LOAM构建3d点云地图并实时转存二维栅格地图 A-loam算法。源代码用的是velodyne雷达话题,但是现在用rslidar来处理。所以也会遇到另外一个包来转换相关的数据。 git clone https://github.com/HKUST-Aerial-Robotics/A-LOAM.git https://github.com/HViktorTsoi/rs_to_velody
lio-sam建图实现
参考:https://blog.csdn.net/unlimitedai/article/details/107378759 https://blog.csdn.net/weixin_44126988/article/details/131654142?ops_request_misc=&request_id=&biz_id=102&utm_term=lego-loam%E5%BB%BA%E5%
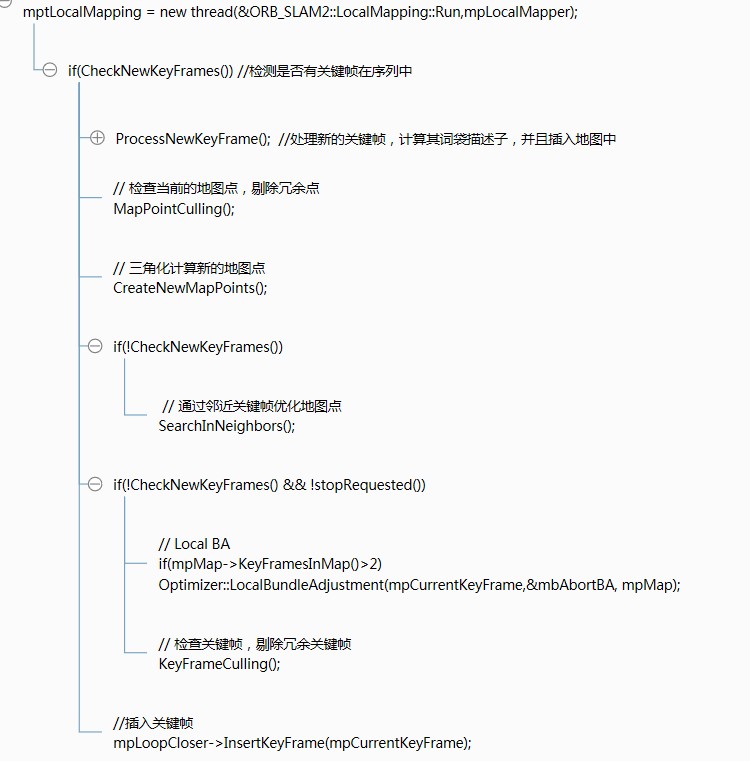
ORB-SLAM2详解(五)局部建图
ORB-SLAM2详解(五)局部建图 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ 在之前的Tracking中,我们得到了新的关键帧Ki。如下图所示,Local Mapping这部分 包括插入关键帧,剔除冗余的地图点和关键帧,还有进行局部集束调整。接下来按照顺序介绍
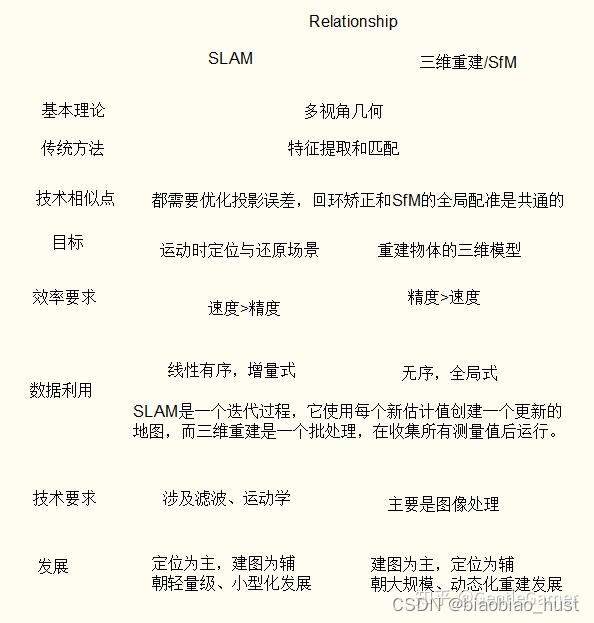
三维重建(SFM)与实时定位建图(SLAM)的区分与联系
1、SLAM SLAM是Simultaneous Location and Mapping,同时定位与地图构建。是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。目的是解决自主机器人“定位”和“建图”两个问题。同时要求能够实时地,没有先验知识地进行。SLAM问题的本质是对主体自身(位姿)和周围环境空间(点云)的不确定性的估计。
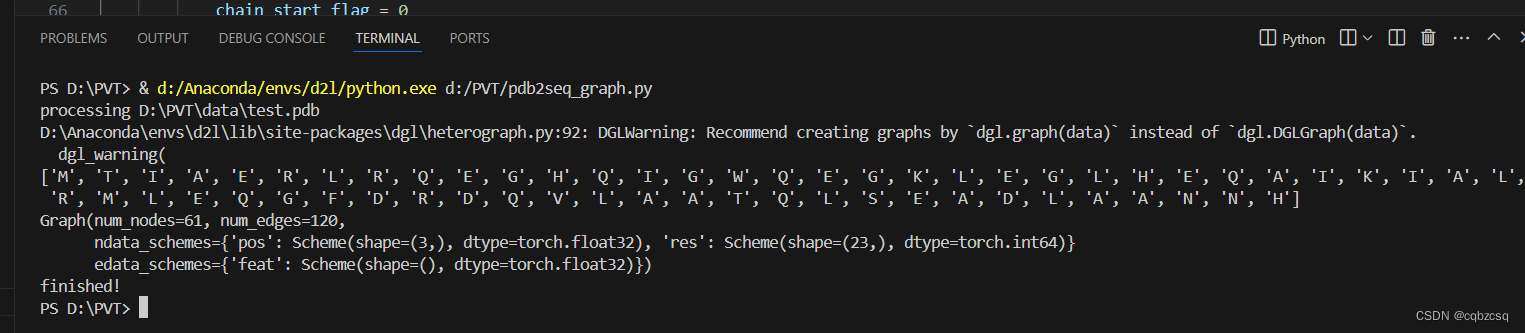
蛋白质PDB文件解析+建图(biopython+DGL)
PDB文件解析 PDB文件设计得非常好,能够比较完整地记录实验测定数据 读懂蛋白质PDB文件-腾讯云开发者社区-腾讯云 (tencent.com) 科学网—PDB文件格式说明 - 李继存的博文 (sciencenet.cn) 从蛋白质结构来看,首先它会有多种不同的测定模型,然后每个模型中包含多条链,每条连上包含若干个残基,每个残基包含若干个原子 在biopython.PDB包中可以找到这
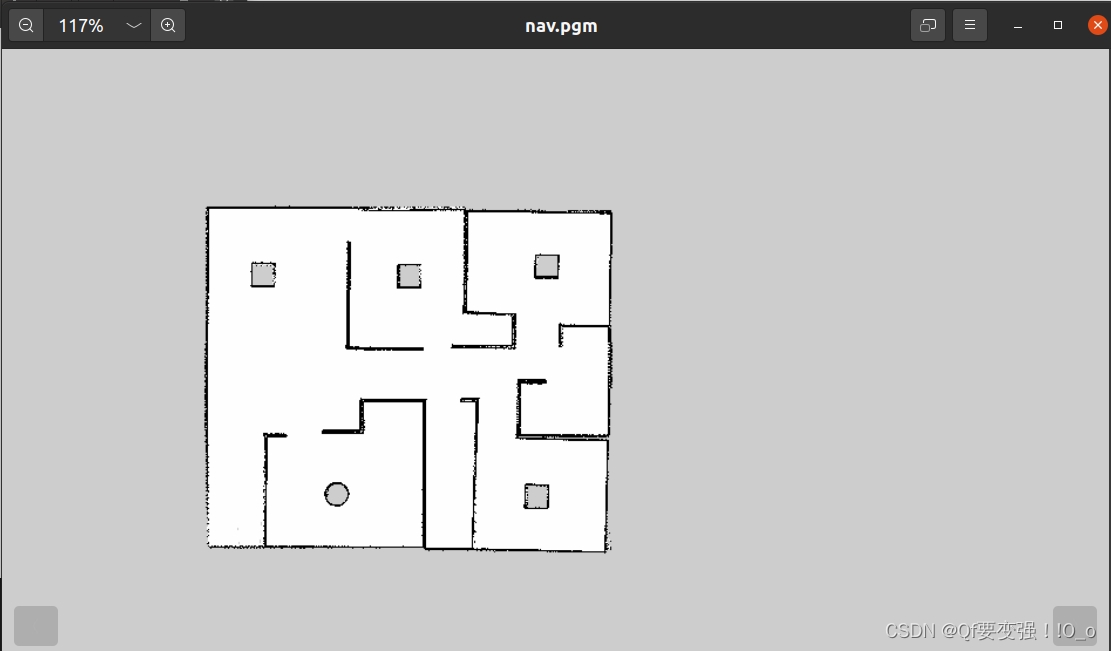
ros2小车使用slam-toolbox建图
结果 ros2小车使用toolbox建图 分析 slam-toolbox需要odom和/scan,所以需要有里程计数据和雷达数据才行。里程计由imu和车轮编码器获取,雷达数据由雷达启动后自动发布。
算法学习系列(五十二):单源最短路的建图方式
目录 引言一、热浪二、信使三、香甜的黄油四、最优乘车五、最小花费六、昂贵的聘礼 引言 本来是一直学 D P DP DP 着呢,不过我觉得 D P DP DP 这种问题太难了,而且不太好做,而且考场上其实能做出来的不是很多,我觉得还是得难易结合,所以打算 D P DP DP 和图论这两章一起学,一天学一个。然后今天先讲单源最短路的建图方式,还是以做题为主,然后开始吧。
HDU 4411 Arrest 最小费用最大流(题意+建图)
题意:0代表警察局,警局里面有k个警察,然后有1~n个城市,每个城市一个小偷,要想抓到第i个城市的小偷,必须先抓或同时抓一个1~i-1城市的小偷作为铺垫,一个警察一次可以抓多个小偷,一个小偷一次被一个警察抓就可以了,抓完小偷后,必须会到警察局0点,问你所有警察走过的路程和。 想法:显然警察越少越好,先找出城市与城市之间的最短路,floyd就可以。 1.设a到b的边的容量为flow,
HDU 1815 Building roads 二分+2-sat充分理解建图
题意:给你两个中转点s1,s2,和很多其他的点d{},d{}里面的点只能连接s1或s2,不能同时连接两个,给你一些关系:com(a,b)表示a,b要同时连接同一个中转点,dex(a,b)表示a,b不能同时连接同一个中转点,问你d{}里面的两对点的最大距离的最小值。 想法:看到了最大距离的最小值,显然用二分枚举,这里有一个小优化,我们不容易确定最大的一个距离点对,但是我们可以很容易的找到一个
![[建图]基于贝叶斯广义核推理的可通行区域建图](https://img-blog.csdnimg.cn/20210421233649957.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L1RyYXZpc19Y,size_16,color_FFFFFF,t_70#pic_center)
[建图]基于贝叶斯广义核推理的可通行区域建图
文章目录 一、简介二、原理三、项目演示四、总结参考 一、简介 可通行区域建图可以将可变高度地形的区域分类为可通行或不可通行,它可以解决崎岖地形和复杂结构化场景,是3D自主导航的有用工具。 相机、激光雷达或两者的组合通常用于地形的三维建图。尽管基于视觉的方法在提供密集点云上方面具有优势,但是它们对照明变化的敏感性可能会使获取的数据不可靠。但激光雷达可能夜间正常运行,且提供远距
ROS下机器人系统仿真及部分SLAM建图
文章目录 一、 Launch文件使用二、 参考资料三、 遇到的问题四、 效果演示五、相关代码5.1 一些简介5.2 机器人模型5.2.1 机器人底盘5.2.2 摄像头5.2.3 雷达 5.3 惯性矩阵 六、代码传送门实验结果及分析 温馨提示:如果有幸看到这个文章,不要看里面的内容,因为只是实验的记录,你看这个文章只会头疼。如果要了解,主要看后面的参考资料和以及这篇文章遇到的某些
mid_360建图和定位
录制数据 roslaunch livox_ros_driver2 msg_MID360.launch 使用fast-lio 建图 https://github.com/hku-mars/FAST_LIO.git 建图效果 使用python做显示 https://gitee.com/linjiey11/mid360/blob/master/show_pcd.py 使