本文主要是介绍[建图]基于贝叶斯广义核推理的可通行区域建图,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 一、简介
- 二、原理
- 三、项目演示
- 四、总结
- 参考
一、简介
可通行区域建图可以将可变高度地形的区域分类为可通行或不可通行,它可以解决崎岖地形和复杂结构化场景,是3D自主导航的有用工具。
相机、激光雷达或两者的组合通常用于地形的三维建图。尽管基于视觉的方法在提供密集点云上方面具有优势,但是它们对照明变化的敏感性可能会使获取的数据不可靠。但激光雷达可能夜间正常运行,且提供远距离可见性和大光圈。本文重点介绍的是使用3D激光雷达实现实时的可通行区域建图。
将可通行区域建图应用于现实世界的自主导航是不简单的,一方面之前建的图不一定可用,另一方面是机器人本身缺少导航所需要的感知或计算能力。基于激光雷达的可通行区域建图方法往往会遇到稀疏数据的问题,这就会限制了覆盖的范围从而影响自主导航。
本文提出一种基于贝叶斯广义核推理的可通行区域建图方法,利用概率推理来创建可描述性地形图。
主要工作:
- 解决了地形建图中遇到的稀疏数据问题。
- 仅对选定位置的高程数据进行可通行性计算,减轻了与可通行性计算相关的负担。
- 探索了该方法在不同数据和地形上的应用,证明了其在现实应用中的适用性。
二、原理
具体的原理介绍可以参考博主AutoMan-USTC的【论文阅读】基于贝叶斯广义核推理的可通行区域建图或者参考原论文 Bayesian Generalized Kernel Inference forTerrain Traversability Mapping。
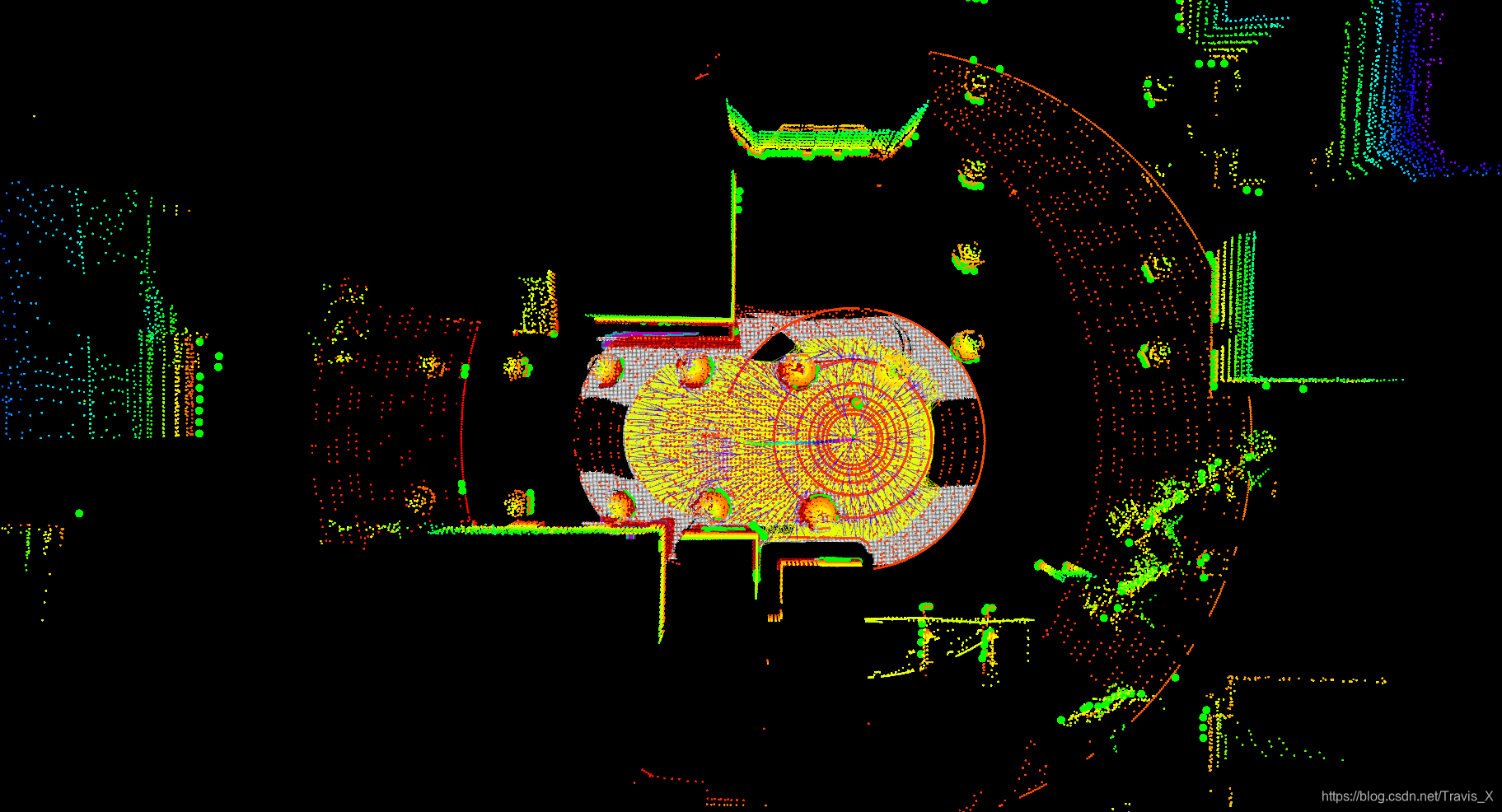
三、项目演示
仿真环境中的可通行区域建图

[建图]基于贝叶斯广义核推理的可通行区域建图(1)
https://www.bilibili.com/video/av375244749?zw
实际环境中的可通行区域
[建图]基于贝叶斯广义核推理的可通行区域(2)
https://www.bilibili.com/video/BV1KA411V7Wk
四、总结
本文提出将贝叶斯广义核推理用于可通性地形图。
可通行区域地图构建分为两步。第一步实现了高度推断来解决可用点云的稀疏性,第二步骤实现了可通性推断来减少穷举可通性计算的负担。
本文提出的框架已经在模拟数据和真实数据中进行了验证,为激光雷达实时构建地形图提供了效率和准确性。未来的工作将考虑协方差信息的实际使用,以更好地支持复杂环境下的安全导航。
参考
[1] W. R. V ega-Brown, M. Doniec, and N. G. Roy. Nonparametric Bayesian inference on multi-variate exponential families. Advances in Neural Information Processing Systems, pp. 2546-2554, 2014.
[2] A. Chilian and H. Hirschmuller. Stereo Camera Based Navigation of Mobile Robots on Rough
Terrain. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 4571-4576, 2009.
[3] https://github.com/TixiaoShan/traversability_mapping
这篇关于[建图]基于贝叶斯广义核推理的可通行区域建图的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!