通行专题

安全运营之通行字管理
一、什么是通行字 安全管理所指的通行字指的是对用于身份验证的账号密码或口令的管理。在计算机系统、网络服务、数据库管理等领域,通行字(或称账号口令、密码)是用于验证用户身份的重要机制。通行字管理的核心目标是确保只有授权用户才能访问系统资源,同时保护敏感信息不被未授权访问。 通行字除了自然人登录信息系统时所必需的用于鉴别登录者身份和权限信息的账号和口令外,还包括信息系统软件之间互相调用数据所需的账

Electron vue 进程间消息通行
在 Electron 应用中,IPC(Inter-Process Communication,进程间通信)是一种允许主进程(main process)和渲染进程(renderer process)之间交换数据的方式。 ipcRenderer.send 在渲染进程中调用, ipcMain 的事件监听器在主进程中设置。 以下是一个简单的例子来展示如何使用 Electron 的 IPC 来发送和接收
![[建图]基于贝叶斯广义核推理的可通行区域建图](https://img-blog.csdnimg.cn/20210421233649957.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L1RyYXZpc19Y,size_16,color_FFFFFF,t_70#pic_center)
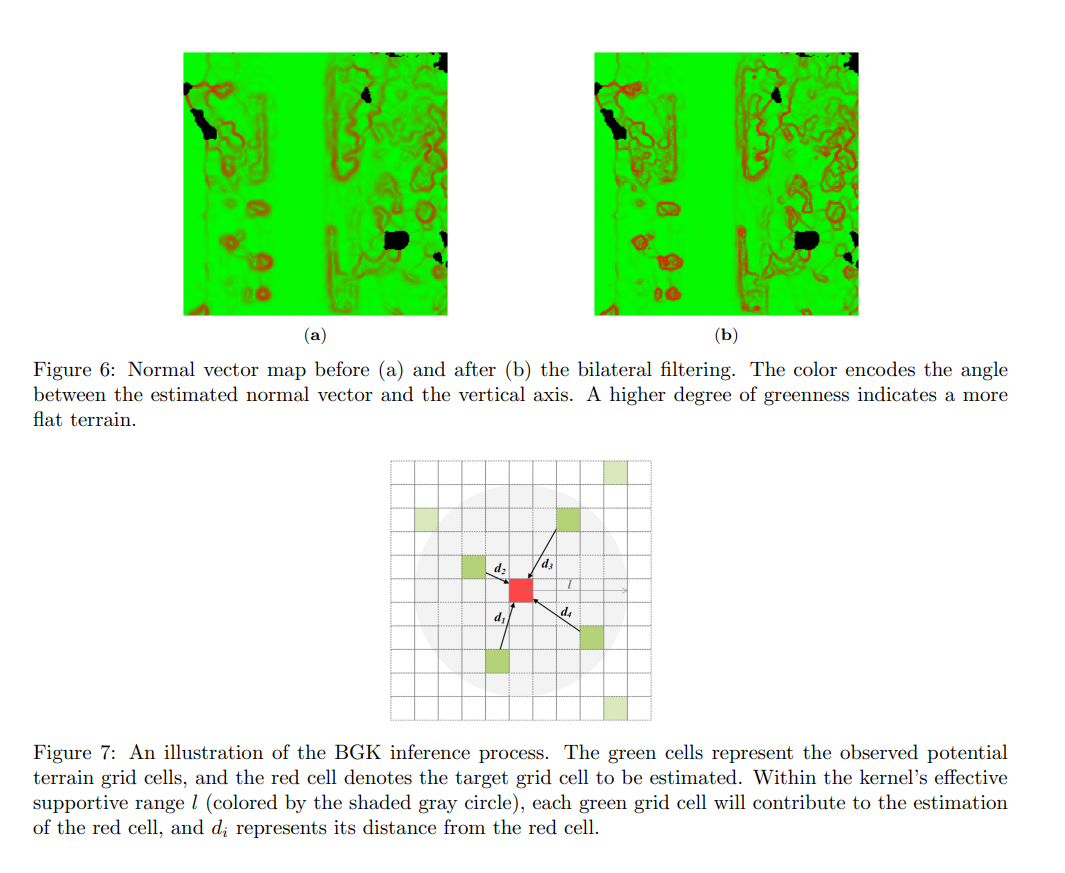
[建图]基于贝叶斯广义核推理的可通行区域建图
文章目录 一、简介二、原理三、项目演示四、总结参考 一、简介 可通行区域建图可以将可变高度地形的区域分类为可通行或不可通行,它可以解决崎岖地形和复杂结构化场景,是3D自主导航的有用工具。 相机、激光雷达或两者的组合通常用于地形的三维建图。尽管基于视觉的方法在提供密集点云上方面具有优势,但是它们对照明变化的敏感性可能会使获取的数据不可靠。但激光雷达可能夜间正常运行,且提供远距

天诚人脸物联网锁搭载智慧公寓管理系统,赋能公寓智慧租住与通行管理
随着我国各大城市大规模地更新进程,各地掀起了人才公寓、地产品牌公寓、长短租公寓建设的浪潮,城中村改造也成为各地热门的民生话题。全场景AIoT解决方案服务商——江苏新巢天诚智能技术有限公司(以下简称“天诚”)从社区居民“租、住、行”为出发点,打造集“AIoT技术+智能硬件+公寓SaaS全场景数据中台+全流程运营服务”于一体的智慧公寓租住与通行整体解决方案。 一、政策加持公寓发展 早在20
SUMO用自带的生成随机车流错误,不可通行
optParser.add_option("--validate", default=True, action="store_true",help="Whether to produce trip output that is already checked for connectivity") randomTrip.py里的这个选项改为true

unity 横版过关单向通行实现(PlatformEffector2D)
目录 前言一、什么是 PlatformEffector2D?二、使用步骤1.创建模型2.创建jump脚本3.PlatformEffector2D组件 三、效果总结 前言 在 2D 游戏中,处理角色与平台之间的交互是一个常见但复杂的任务。为了简化这一过程,Unity 提供了 PlatformEffector2D 组件,提供了更灵活的方式来定义角色与平台之间的交互行为。 一
194.【2023年华为OD机试真题(C卷)】单行道汽车通行时间(迭代计算—JavaPythonC++JS实现)
请到本专栏顶置查阅最新的华为OD机试宝典 点击跳转到本专栏-算法之翼:华为OD机试 🚀你的旅程将在这里启航!本专栏所有题目均包含优质解题思路,高质量解题代码,详细代码讲解,助你深入学习,深度掌握! 文章目录 【2023年华为OD机试真题(C卷)】单行道汽车通行时间(迭代计算—Java&Python&C++&JS实现)题目描述<
用 Unity 实现的安检模拟小游戏源码,通过安检设备 (扫描仪) 检查乘客的随身物品 根据禁止名单对乘客做出判断是否允许通行
介绍 用 Unity 实现的安检模拟小游戏 软件版本 Unity 2019.4.9f1 (64-bit) Visual Studio 2019 游戏玩法 在游戏中你将扮演一名安全检查员 通过安检设备 (扫描仪) 检查每位乘客的随身物品 根据禁止名单对乘客做出判断:允许通行或者下令逮捕 游戏效果 游戏截图 主界面截图 游戏内容截图 游戏结算截图 更新实现进度 11-2
经典文献阅读之--Traversability Analysis for Autonomous Driving...(Lidar复杂环境中的可通行分析)
0. 简介 对于自动驾驶来说,复杂环境的可通行是最需要关注的任务。《Traversability Analysis for Autonomous Driving in Complex Environment: A LiDAR-based Terrain Modeling Approach》一文提出了用激光雷达完成建图的工作,其可以输出稳定、完整和精确的地形建模以及可通行分析结果。由于地形是环境的
从“一码通行”到“数字孪生”,区块链打通最后一环节
作者:海伦 目前,为兼顾疫情防范与复工复产,国务院办公厅会同有关方面升级了全国一体化政务服务平台“防疫健康信息码”,建立“健康码”信息跨省互认机制,实现全国范围内一码通行。 “健康码”是由公民自行上传身份信息、出行安排与健康实况,经居住属地机关核实后,在全国范围内进行信息共享,并作为交通卡口、居住小区、企业园区以及公共管理和服务机构的通行凭证。 “健康码”是智慧城市公民身份体系的试水 “健康

道路通行能力手册的“网络互动版”
道路通行能力是道路规划、工程可研、几何设计和交通管理的基础参数,是交通工程从业人员必备知识之一。世界范围内,美国TRB的HCM最系统,并先后从1950年到2010年出版了五个正式版本。我国也通过“九五”到“十二五”科技部科技攻关、科技支撑计划和交通部科技项目的支持,先后编制了《公路通行能力手册》和《城市道路通行能力手册》。 众所周知,丰富的数据来源是道路设施通行能力研究的根本,由此北京交通工程

刷脸通行能应用在会议签到中吗?
“刷脸”应该是人脸识别后进行人脸比对。此技术可以应用于各种的会议场合,但最好是和证件配合完成签到和管理功能。因为只刷脸会存在很多不定性,无法完全满足会议签到的需求,比如:有一个人在远处被拍摄到了,那么算是签到了吗?怎么确保他进去了呢?还比如:怎么拦截住不符合的人群呢?最严重的还是:没有严肃性,是不是只要愿意都可以去刷刷试试呢? “人证合一”才是完美的会议签到解决方案,其过程是:首先刷卡确认参会人
一种国际互联网界通行的道德规范——Robots协议
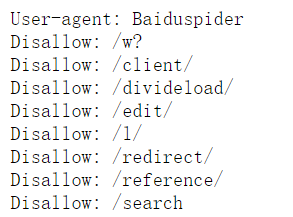
原则: 1搜索技术应服务于人类,同时尊重信息提供者的意愿,并维护其隐私权; 2网站有义务保护其使用者的个人信息和隐私不被侵犯。 robots协议(也称爬虫协议,机器人协议等)是一种存放于网站根目录下的文本文件, (在一网页中,在网页的URL(即网址)后加上/robots.txt,即可查看)如下图(了解) 通常告诉网络爬虫,此网站中的哪些内容是不应被网络爬虫获取的,哪些是可以被获取的
宇视云通行设置子账户远程开门权限
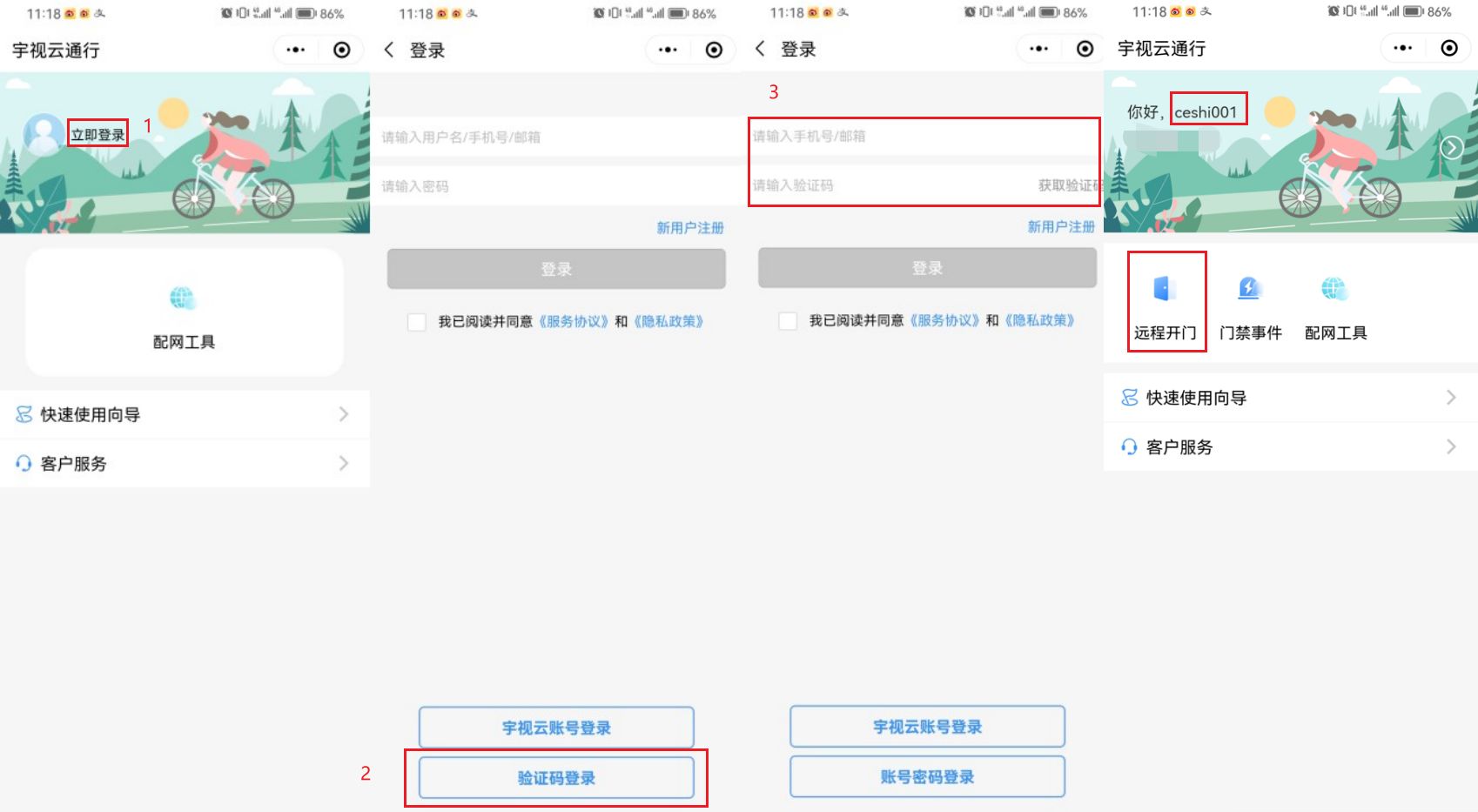
宇视云通行设置子账户远程开门权限 1、访问宇视云通行网站 (https://ezaccess.uniview.com/),使用小程序的管理员手机号验证码登录 2、在用户管理里面新建用户 3、填写用户名、密码、确认密码。勾选状态监控,保存 4、使用新创建的账号的用户名密码登录,绑定对应的手机号,登录 5、显示此界面 6、使用第4步绑定的手机号,登录宇视云

疫情下,我们助力某港口通行卡系统故障定位
关于某港口集团 某港口是国家重要的战略资源,是京津冀及“三北”地区的海上门户、雄安新区主要出海口,是“一带一路 ”的海陆交汇点 、新亚欧大陆桥经济走廊的重要节点和服务全面对外开放的国际枢纽港 ,连续多年跻身世界港口前十强。 疫情通行卡系统故障现象 近期凌晨时段,该港口货运司机通过手机上传核酸报告时,总是会出现大量的等待时间,或者上传失败的现象。 港口疫情通行卡系统,为港口车辆司机提供通

基于antdv封装的特殊复杂表格,带通行描述信息、可展示通行的单元格信息、可跨页选择数据功能、分页功能、可编辑单元格功能
基于antdv封装的特殊复杂表格,带通行描述信息 主要功能: 可展示通行的单元格信息可跨页选择数据功能表单插槽、合计插槽、操作按钮区插槽分页功能接口内请求api可编辑单元格表格组件暴漏出的方法:查询、获取选中数据、接口返回数据、当前表格数据【设置可编辑单元格时获取数据】 页面示例: 本页主要是下面这种大通行效果【选择和序号都通行】 还有一种是通行不带选择和序号,如下:代码下载地址 : h