本文主要是介绍视觉SLAM十四讲:从理论到实践(Chapter12:建图),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
学习笔记,仅供学习,不做商用,如有侵权,联系我删除即可
一、主要目标
1. 理解单目SLAM中稠密深度估计的原理。
2. 通过实验了解单目稠密重建的过程。
3. 了解几种RGB-D重建中的地图形式。
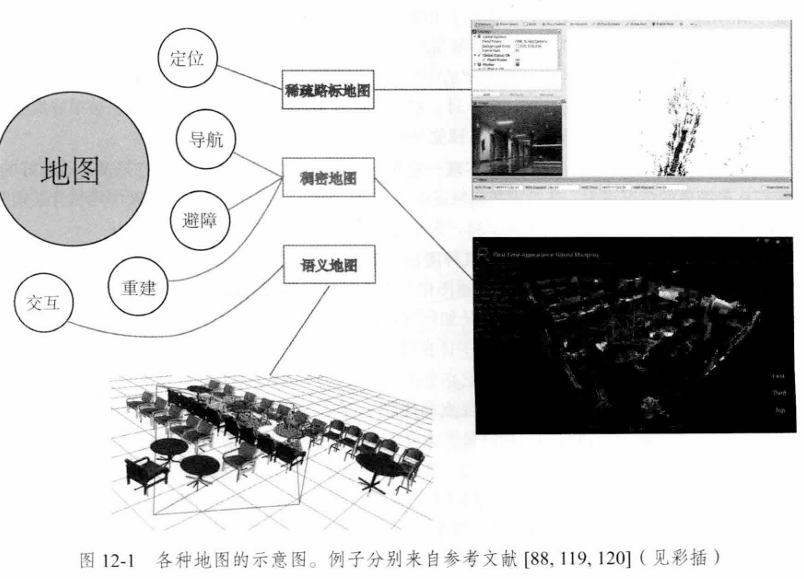
构建的地图也有多种功能分类:
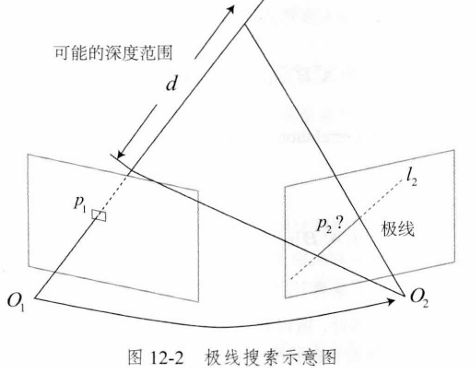
二、单目稠密重建
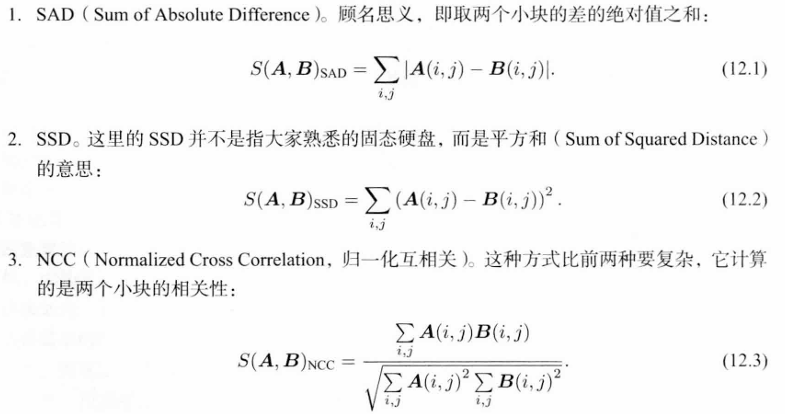
使用极限搜索和块匹配技术
有多种计算方法,其中常用的算法是NCC:


这篇关于视觉SLAM十四讲:从理论到实践(Chapter12:建图)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





