slam专题

无人叉车3d激光slam多房间建图定位异常处理方案-墙体画线地图切分方案
墙体画线地图切分方案 针对问题:墙体两侧特征混淆误匹配,导致建图和定位偏差,表现为过门跳变、外月台走歪等 ·解决思路:预期的根治方案IGICP需要较长时间完成上线,先使用切分地图的工程化方案,即墙体两侧切分为不同地图,在某一侧只使用该侧地图进行定位 方案思路 切分原理:切分地图基于关键帧位置,而非点云。 理论基础:光照是直线的,一帧点云必定只能照射到墙的一侧,无法同时照到两侧实践考虑:关

激光SLAM如何动态管理关键帧和地图
0. 简介 个人在想在长期执行的SLAM程序时,当场景发生替换时,激光SLAM如何有效的更新或者替换地图是非常关键的。在看了很多Life-Long的文章后,个人觉得可以按照以下思路去做。这里可以给大家分享一下 <br/> 1. 初始化保存关键帧 首先对应的应该是初始化设置,初始化设置当中会保存关键帧数据,这里的对应的关键帧点云数据会被存放在history_kf_lidar当中,这个数据是和
用python fastapi写一个http接口,使ros2机器人开始slam toolbox建图
如果你想使用Python的FastAPI框架编写一个HTTP接口,以便通过接口启动ROS 2机器人的SLAM Toolbox建图,可以按照以下方式进行: 首先,确保你已经安装了fastapi和uvicorn库。你可以使用以下命令进行安装: pip install fastapi uvicorn 接下来,创建一个Python文件(例如app.py),并将以下代码添加到文件中: import

GS-SLAM论文阅读笔记--GSFusion
介绍 GS-SLAM是最近比较新的方向,由于传统SLAM的研究变得很少,拥抱与新的技术结合的方法也许是个好主意。之前总结了大部分GS-SLAM的文章。但是这个方向在不断发展,而发展初期的很多论文值得参考。所以用博客记录一下比较新的论文阅读笔记。GSFusion 这篇文章是TUM发表的,TUM在SLAM领域是非常牛的,所以需要仔细阅读一下这篇文章,肯定会有所收获! 文章目录 介绍1.

SLAM相关数据集调研
SLAM相关数据集调研 主要分成4种:关于自动驾驶的数据集,包含Depth的SLAM及三维重建数据集,不含Depth的数据集,包含语义的数据集。 自动驾驶: KITTI数据集:http://www.cvlibs.net/datasets/kitti/index.php (RGB+Lidar+GPS+IMU) KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最

SLAM ORB-SLAM2(29)PnP估计姿态
SLAM ORB-SLAM2(29)PnP估计姿态 1. PnP问题2. EPnP算法2.1. 计算4对控制点的世界坐标2.2. 计算齐次质心坐标2.3. 计算4对控制点的相机坐标2.3.1. 构造M矩阵2.3.2. 计算 M T M M^TM MTM的0特征值对应的特征向量2.3.3. 计算零空间的秩2.3.4. 计算线性组合的系数 2.4. 选择最小重投影误差 3. 标题
SLAM_极线搜索最佳匹配特征点_NCC
目录 1. 需求 2. 代码实现 思路 代码 极线搜索 NCC的实现 双线性插值 1. 需求 输入: 参考图像ref, 当前图像curr, 当前图像相对于参考图像的位姿T_C_R, 参考图像的深度图depth和深度方差图depth_cov, 输入参考图像ref上的一个像素点坐标pt_ref, 求解: 在当前图像上的最佳匹配点pt_curr 2. 代码实现 思路

视觉SLAM补充习题(来源于B站博主)
题目来源于up主全日制学生混的SLAM课程,代码链接如下: GitHub - cckaixin/Practical_Homework_for_slambook14: This repository is used to store SLAM 14 training exercises 如果打不开github请参考下面两篇博文,亲测有效!! 解决国内 github.com 打不开的最最最准确方

DSO slam ros 模式
dso 直接法纯视觉定位,作者采用读取包的方式,数据使用存在不方便. 源码:https://github.com/JakobEngel/dso.git ros需要链接库版:https://github.com/JakobEngel/dso_ros.git 直接运行版:GitHub - jankinbyy/dso_ros_run 在config下修改相机内参. 结果:地图点密度较高,尺度存

Gazebo Harmonic gz-harmonic 和 ROS2 Jazzy 思考题 建图和导航 SLAM Navigation
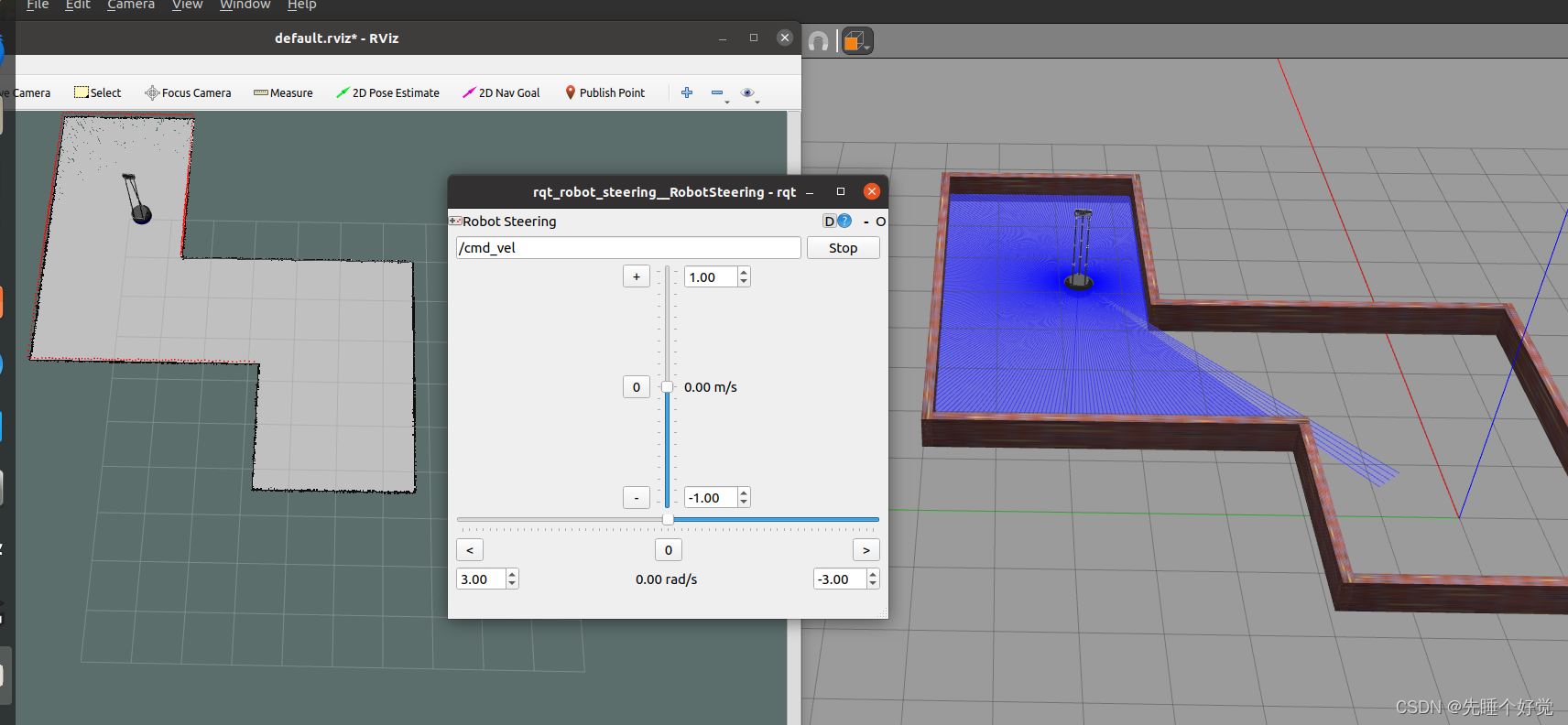
仿真 效果还挺好的。 SLAM建图 导航 …… 提示 这篇文档详细介绍了如何在ROS 2环境中使用SLAM(Simultaneous Localization and Mapping,即同时定位与地图构建)和Nav2(Navigation 2,ROS 2的导航框架)来让机器人一边构建环境地图一边进行导航。以下是对该文档的详细总结: 概述 文档主要面向ROS 2用户

自动驾驶-机器人-slam-定位面经和面试知识系列10之高频面试题(04)
这个博客系列会分为C++ STL-面经、常考公式推导和SLAM面经面试题等三个系列进行更新,基本涵盖了自己秋招历程被问过的面试内容(除了实习和学校项目相关的具体细节)。在知乎和牛客也会同步更新,全网同号(lonely-stone或者lonely_stone)。 关于高频面试题和C++ STL面经,每次我会更新10个问题左右,每次更新过多,害怕大家可能看了就只记住其中几个点。(在个人秋招面试过程中,

DOT:视觉SLAM的动态目标物跟踪
点云PCL免费知识星球,点云论文速读。 文章:DOT: Dynamic Object Tracking for Visual SLAM 作者:Irene Ballester, Alejandro Fontan, Javier Civera 翻译:分享者 本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈分享快乐。 论文阅读模块将分享点云处理,SLAM

OmniSLAM:多鱼眼相机的SLAM系统
点云PCL免费知识星球,点云论文速读。 文章:OmniSLAM: Omnidirectional Localization and Dense Mapping for Wide-baseline Multi-camera Systems 作者:Changhee Won, Hochang Seok , Zhaopeng Cui , Marc Pollefeys , and Jongwoo Lim

Fast ORB-SLAM
点云PCL免费知识星球,点云论文速读。 文章:FastORB-SLAM: Fast ORB-SLAM method with Coarse-to-Fine Descriptor Independent Keypoint Matching 作者:Qiang Fu12, Hongshan Yu1 , Xiaolong Wang 翻译:particle 本文仅做学术分享,如有侵权,请联系删除。欢迎各位

在结构化场景中基于单目的物体与平面SLAM方案
点云PCL免费知识星球,点云论文速读。 文章:Monocular Object and Plane SLAM in Structured Environments 作者:Shichao Yang, Sebastian Scherer 翻译:particle 本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈分享快乐。 论文阅读模块将分享点云处理,SL

【开源分享】VIDO-SLAM:一种视觉惯性动态物体SLAM系统
文章:Inertial-Only Optimization for Visual-Inertial Initialization 作者:Carlos Campos, Jose M.M. Montiel and Juan D. Tard ´ os´ 代码:https://github.com/bxh1/VIDO-SLAM.git 编译:点云PCL 本文仅做学术分享,如有侵权,请联系删除。欢迎各位加

Road-SLAM:基于道路标线车道级精度SLAM
文章:Road-SLAM : Road Marking based SLAM with Lane-level Accuracy 作者:Jinyong Jeong, Younggun Cho, and Ayoung Kim1 编译:点云PCL 本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。内容如有错误欢迎评论留言,未经允许请勿转载! 对本文以及俯

SLAM激光导航 | 地牛式AGV机器人,“7*24小时”玩着工作!
agv 地牛AGV是一种小巧方便,使用灵活,载重量大,结实耐用的货物搬运工具。最大特点是可以直接叉取、提升和搬运托盘,不需要再额外利用铁架进行支撑,不仅更省成本,而且运作更灵活,“托盘在哪里,就可以点到点搬运到哪里。” 地牛AGV 地牛AGV小巧而精悍,实现了多行业、多场景化应用,应用前景广阔。驱动方式采用独立的双舵轮驱动,具有转向角灵活可调的功能,实现四向行走、原地
SLAM Paper Reading和代码解析
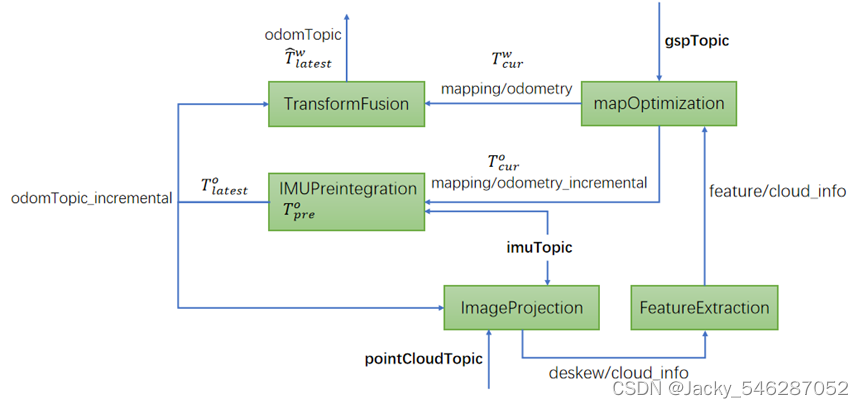
最近对VINS、LIO-SAM等重新进行了Paper Reading和代码解析。这两篇paper和代码大约在三年前就读过,如今重新读起来,仍觉得十分经典,对SLAM算法研发具有十分重要的借鉴和指导意义。重新来读,对其中的一些关键计算过程也获得了更新清晰的了解,现整理分享出来,供有需要的同学参考。 VINS-MONO算法总结-徐胜攀.pdf资源-CSDN文库 对VINS-MONO的算法框架进
slam移动机器人预测n秒后的里程数据
slam移动机器人预测n秒后的里程数据 为了实现这个功能,需要完成以下几个步骤: 订阅/odom话题并获取当前和上一时刻的里程计数据。计算两次里程计数据之间的位置和角度的偏移量。计算时间间隔dt。使用运动模型计算当前的速度vx, vy, vth。预测3秒后的位置和角度。将预测的位置和角度转换为geometry_msgs::TransformStamped类型。 #inc
ROS学习记录:SLAM软件包Hector_Mapping
前言 了解和尝试使用Hector_Mapping软件包 一、搜索进入ROS Index 二、搜索hector_mapping 三、选择noetic的版本 四、进入Website 五、订阅的话题中,一个是scan话题,就是获取激光雷达数据的话题 六、另一个话题是syscommand话题,主要用来接收reset这类重新建图的指令 七、再看看它发布的话题,第一个是
ROS机器人小车建模仿真与SLAM
文章目录 一、URDF二、创建小车模型1.创建功能包2.导入依赖3.创建urdf,launch文件:4.可视化 三、添加雷达1.xacro文件2.集成和修改launch3.添加摄像头和雷达 三.GAZEBO仿真四、orbslam2+kitti1.下载2.安装编译ORB_SLAM23.运行Kitee数据集 一、URDF URDF,即统一机器人描述格式(Unified Robo

Pose-Graph SLAM 中对误差函数的理解
误差函数: ; 是状态向量,每个x代表机器人的位置(也可以是landmark的位置); 给定一个,我们就能根据测量方程计算出一个估计观测量,而实际测量量是通过传感器测量计算出来的; 这两个观测量之间存在一个err
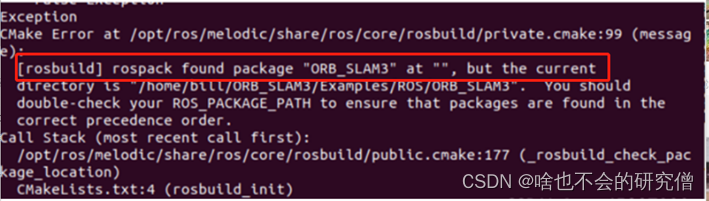
【ORB_SLAM系列4】—— 一文搞定如何在Ubuntu20.04中安装运行ORB_SLAM3(包含ROS版本和非ROS版本)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、ORB_SLAM源码下载1.源码下载 二、安装支持C++特性依赖三、安装Pangolin1. 安装Pangolin的依赖2. 下载编译 四、安装Opencv五、安装Eigen3六、DBoW2 and g2o七、安装boost库八、非ROS部分的源码编译和安装1. 编译之前先修改代码2. 编译源码 九、