本文主要是介绍【ORB_SLAM系列4】—— 一文搞定如何在Ubuntu20.04中安装运行ORB_SLAM3(包含ROS版本和非ROS版本),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、ORB_SLAM源码下载
- 1.源码下载
- 二、安装支持C++特性依赖
- 三、安装Pangolin
- 1. 安装Pangolin的依赖
- 2. 下载编译
- 四、安装Opencv
- 五、安装Eigen3
- 六、DBoW2 and g2o
- 七、安装boost库
- 八、非ROS部分的源码编译和安装
- 1. 编译之前先修改代码
- 2. 编译源码
- 九、ROS部分的源码编译和安装
- 1. 创建ROS工作空间(已创建可忽略)
- 2. 编译前先对源码进行修改
- 3. 编译运行源码
- `创作不易,有什么错误的地方,希望大佬们指出,以免误人子第!!!!!`
- 总结
前言
ORB-SLAM3是一款基于特征点的实时单目SLAM系统,是SLAM领域的研究热点之一。它的核心算法是结合了ORB特征点提取和描述子匹配、单目RGB相机的深度估计、运动估计和地图优化等步骤,能够在实时性和精度之间取得平衡,适用于各种环境下的定位和建图任务。在各种应用领域都有广泛的应用,如室内导航、自动驾驶、机器人导航、增强现实等。通过在移动机器人和自主系统中实现实时的SLAM功能,ORB-SLAM3为机器人领域的研究和应用提供了强大的支持,帮助机器人实现自主导航和定位。
ORB-SLAM3的算法原理主要包括以下几个步骤:首先,通过ORB特征点提取和描述子匹配来进行特征点的追踪和匹配;然后利用单目RGB相机的深度信息进行稀疏或稠密的深度估计;接着通过运动估计来估计相机的运动和姿态变换;最后通过地图优化来不断修正和优化地图的几何结构,从而实现实时的定位和建图。
总的来说,ORB-SLAM3作为一款领先的实时SLAM系统,不仅在技术上具有重要意义,还在社会和经济发展中发挥着积极的作用,推动了机器人技术的发展和应用,为社会带来了更多的便利和效益。
一、ORB_SLAM源码下载
打个预告:在ubuntu20.04中安装和运行ORB3相对在18.04中来讲,要简单很多,很多库都是系统自带,不需要也没必要重新下载按装下载其他的库版本,很麻烦,也会很容易搞乱了电脑环境,一定要秉承能改代码就改,不行再换库的原则,切记!!!!!,不然一不小心就喜提重装系统一次!废话不多说,开始教程。
本次教程是介绍如何在ubuntu20.04中运行ORB_SLAM3
配置的环境如下:
Ubuntu20.04、 ROS:Noetic
Opencv4.2.0、 Pangolin0.6
Boost库1.77.0版本、 Eigen3.7
先创建个工作空间,把所有要装的源代码放进工作空间目录下的src文件下,后面配ROS环境下的SLAM时要用到。这次运行的版本是master/1.0,虽然是二刷,由于ubuntu版本和以前安装的不同的原因,还是有很多坑!!!
1.源码下载
要下载master/1.0版本的源码:
下载网址:https://github.com/UZ-SLAMLab/ORB_SLAM3
版本如下所示:
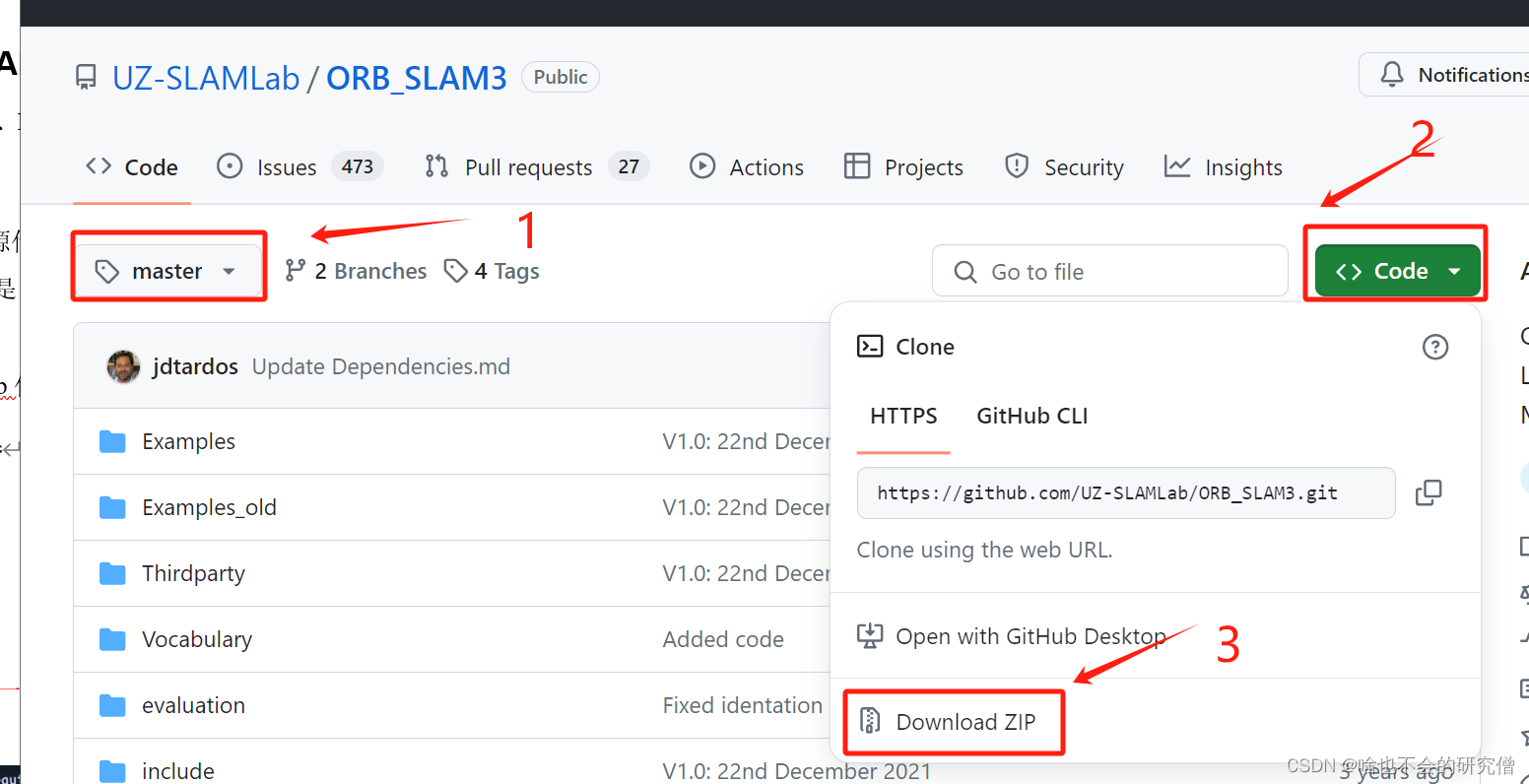
去github下载的代码,建议可以复制github代码连接的URL,从码云(gitee)上导入下载,下载快些。
二、安装支持C++特性依赖
终端输入:
sudo apt-get install gcc
sudo apt-get install g++
sudo apt-get install build-essential
sudo apt-get install cmake
sudo apt-get install git
三、安装Pangolin
1. 安装Pangolin的依赖
sudo apt install libgl1-mesa-dev
sudo apt install libglew-dev
sudo apt install libpython2.7-dev
sudo apt install pkg-config
sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
2. 下载编译
注意:下载0.6版本安装即可,一定不要安装最新版的Pangolin!!!!
不然运行./buil_ros.sh时出现如下错误:
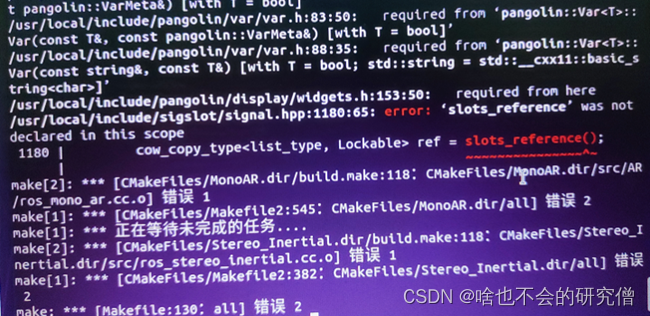
解决:
卸载重装,不然要改很多源代码
在Pangolin/build目录下打开终端:sudo apt uninstall ,然后删除Panglion文件夹即可。
(1)下载源码
下载地址:https://github.com/stevenlovegrove/Pangolin
(2)编译安装
进入Pangolin目录下,创建build:
mkdir build
cd build
编译源码:
cmake ..
make
安装到本机:
sudo make install
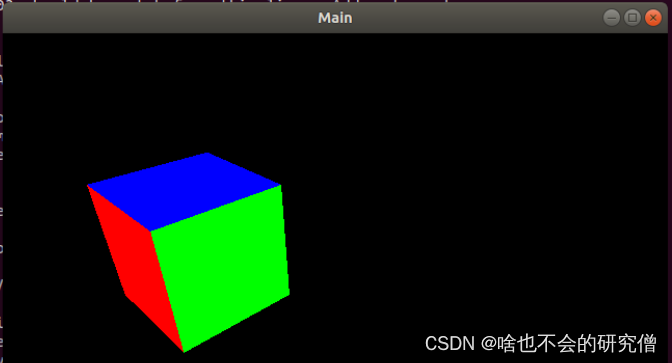
(3)检查是否安装成功
cd examples/HelloPangolin
./HelloPangolin
有如下的正方体图案出现即表示安装成功。
四、安装Opencv
在ubuntu20.04中自带了opencv4.2.0的版本,故无需重装,修改代码中有光opencv版本信息即可,如下所示:
1. 修改工作空间目录下src/ORB_SLAM3下的CMakeLists.txt文件
修改为如下图如下:
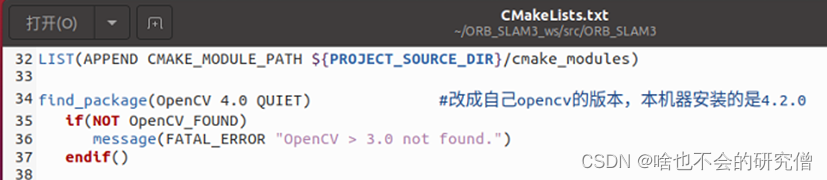
具体代码如下:
find_package(OpenCV 4.0 REQUIRED)if(NOT OpenCV_FOUND)message(FATAL_ERROR "OpenCV > 3.0 not found.")endif()
2. 在ORB_SLAM3/Thirdparty/DBoW2/CMakeLists.txt中修改为:
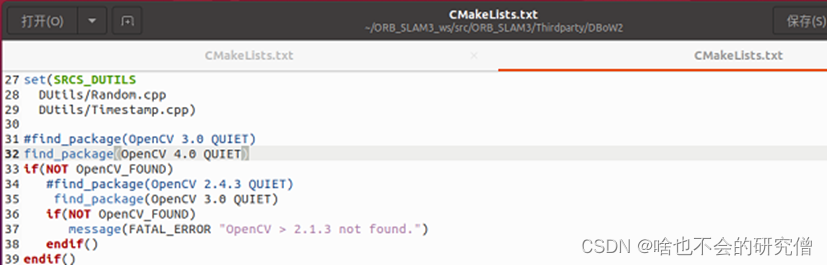
具体代码如下:
find_package(OpenCV 4.0 QUIET)
if(NOT OpenCV_FOUND)find_package(OpenCV 3.0 QUIET)if(NOT OpenCV_FOUND)message(FATAL_ERROR "OpenCV > 2.1.3.0 not found.")endif()
endif()
3. 在ROS/ORB_SLAM3/CMakeLists.txt中修改:
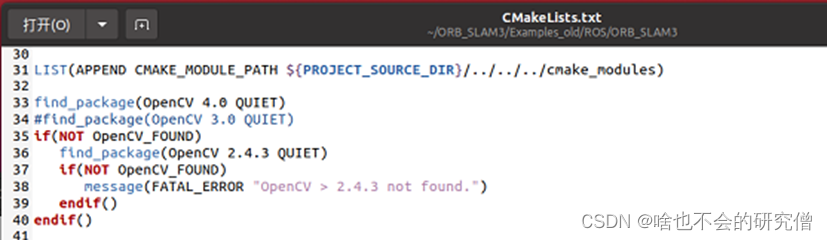
具体代码如下:
find_package(OpenCV 4.0 QUIET)
if(NOT OpenCV_FOUND)find_package(OpenCV 2.4.3 QUIET)if(NOT OpenCV_FOUND)message(FATAL_ERROR "OpenCV > 2.4.3 not found.")endif()
endif()
注意:如果你的opencv版本是3.x.x的,则修改成3.0即可,本机的是4.2.0故修改成4.0,一定不要只改成4,这样也会报错,原因暂时未知。
五、安装Eigen3
在ubuntu20.04中自带了Eigen3的版本,这步可以跳过,使用自带的即可。
六、DBoW2 and g2o
DBoW2主要用于回环检测,g2o(General Graph Optimization)主要用于图优化。ORB-SLAM3的master/1.0的源码包自带DBoW2 and g2o,编译时会自动安装。不用管。
七、安装boost库
ubuntu20.04中自带boost库可以使用,可以跳过此步,使用自带的即可。
八、非ROS部分的源码编译和安装
1. 编译之前先修改代码
(1) 修改在CMakeList.txt文件
在src/ORB_SLAM和ROS/ORB_SLAM目录下,建议在-wall 后面加上-w 用于屏蔽Warning便于发现错误上午真正位置。如下图所示:
(2) 修改build.sh/build_ros.sh文件
建议将build.sh/build_ros.sh文件中的make -j/make -j4改成make -j2/make 避免运行./build.sh时出现系统卡死的情况
(3) 修改build_ros.sh文件
如果使用的是master/1.0版本的源码,要build_ros.sh文件中的其中的路径,Example改成Example_old,应为新版本的源码中ROS文件夹放到了Example_old目录下了。
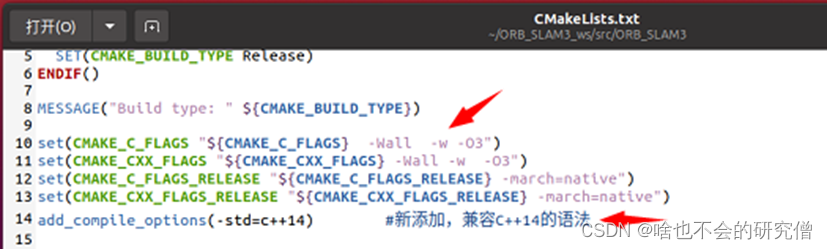
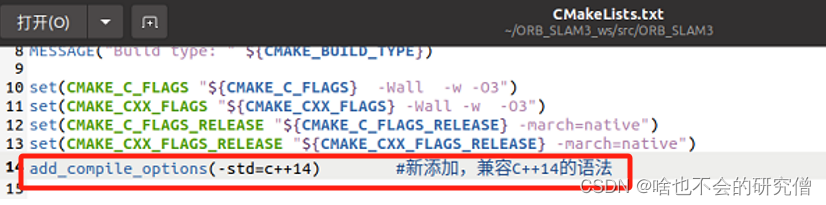
(4) 修改ORB_SLAM3/CMakeLists.txt文件
添加c++的使用许可:
add_compile_options(-std=c++14)
添加的位置如下图所示:
(5) 修改mono_euroc.cc文件
ORB_SLAM3-master/1.0版本是默认不打开窗口的,运行ORB_SLAM3时,只有终端的窗口,没有调出其他可视化的。在/ORB_SLAM3_ws/src/ORB_SLAM3/Examples/Monocular目录和下修改mono_euroc.cc文件,将false改成true,如下所示:
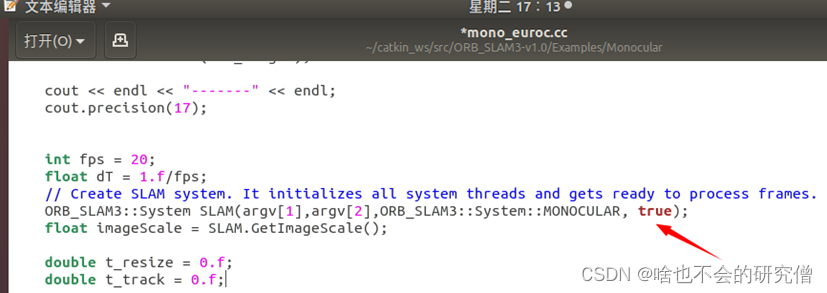
具体代码如下:
ORB_SLAM3::System SLAM(argv[1],argv[2],ORB_SLAM3::System::MONOCULAR, true);
2. 编译源码
终端输入:
chmod +x build.sh./build.sh
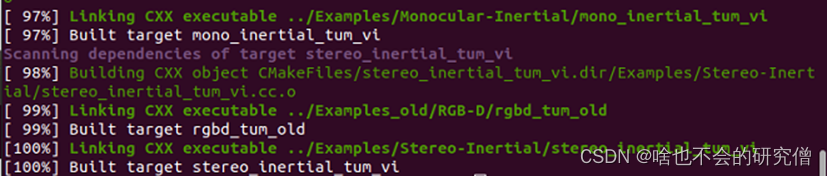
至此,编译非ROS环境下的源码应该是没什么问题了!编译成功的终端截图如下:
九、ROS部分的源码编译和安装
1. 创建ROS工作空间(已创建可忽略)
1)创建工作空间,终端输入:
roscore
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
2)编译工作空间
cd ~/catkin_ws/
catkin_make
3)使得工作空间的环境变量生效
source devel/setup.bash
4)使得环境变量在所有的终端中都有效(将路径添加进.bashrc文件中):
按个人的喜好,此步骤不是必选项,执行这段代码之后,意味着电脑开机就自动生效该工作空间的ROS环境
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
5)保存.bashrc文件,查看添加的环境变量是否生效:
source ~/.bashrc
6)查看添加的环境变量是否生效,创建一个新终端,输入:
echo $ROS_PACKAGE_PATH
回车之后会显示如下语句,如果打印的路径中包含当前工作空间的路径,则环境变量设置成功。
2. 编译前先对源码进行修改
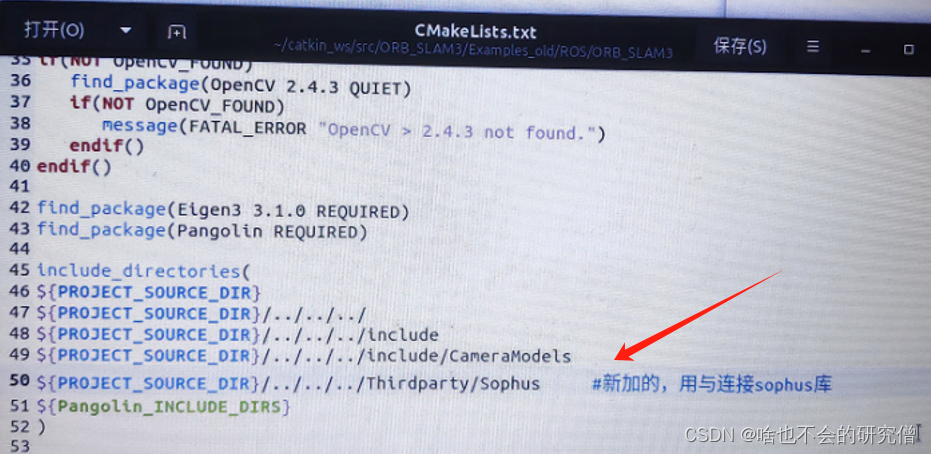
**(1) 修改Viewer.cc文件 **
在Example_old/ROS/ORB_SLAM3/src/AR目录下,在Viewer.cc文件中添加如下:
{PROJECT_SOURCE_DIR}/../../../Thirdparty/Sophus
添加的位置如下:
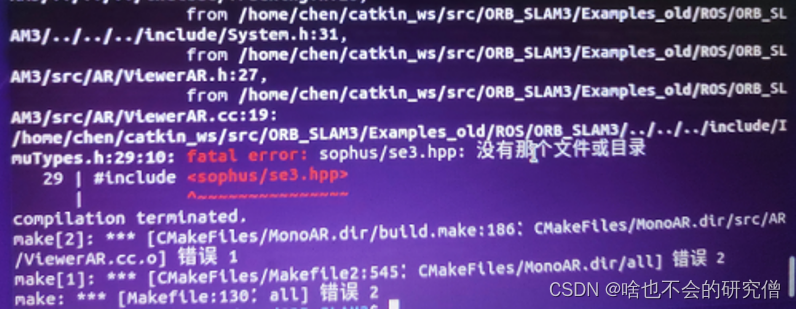
不添加可能会出现报错:提示找不到sophus库,如下图所示:
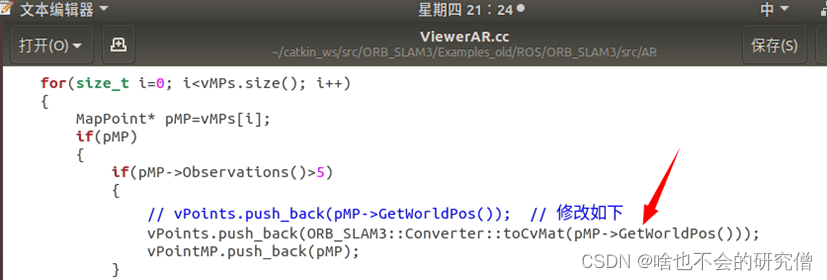
(2) 修改ViewerAR.cc文件
在ROS/ORB_SLAM3/src/AR目录下,修改ViewerAR.cc文件
1)添加Converter.h头文件
#include "../../../include/Converter.h"
修改的位置如下图所示:

2)大概405行,修改为
vPoints.push_back(ORB_SLAM3::Converter::toCvMat(pMP->GetWorldPos()));
修改的位置如下图所示:
3)大概在530行,修改为
cv::Mat Xw = ORB_SLAM3::Converter::toCvMat(pMP->GetWorldPos());
修改的位置如下图所示:

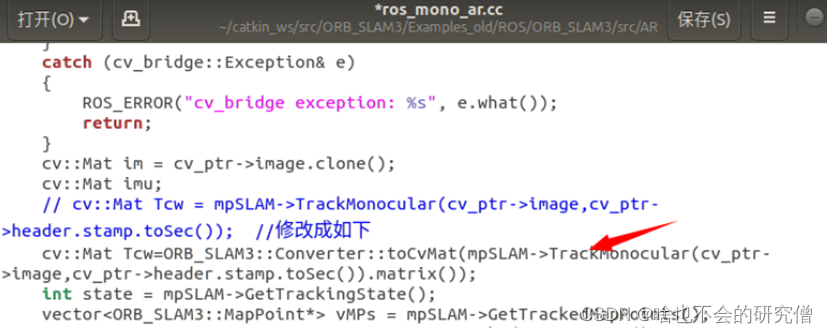
(3) 修改ros_mono_ar.cc文件
在ROS/ORB_SLAM3/src/AR目录下,修改ros_mono_ar.cc文件
1)添加Converter.h头文件
#include "../../../include/Converter.h"
修改的位置如下图所示:

2) 大概在151行,修改为:
cv::Mat Tcw=ORB_SLAM3::Converter::toCvMat(mpSLAM->TrackMonocular(cv_ptr->image,cv_ptr->header.stamp.toSec()).matrix());
修改的位置如下图所示:
3. 编译运行源码
(1) 将ROS包的路径添加到环境中
打开bashrc文件并编辑
终端输入:sudo gedit ~/.bashrc
在.bashrc的最后一行加入ORBSLAM的ROS代码寻找的路径
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/chen/catkin_ws/src/ORB_SLAM3/Examples_old/ROS
注意:其中的路径换成自己的路径,如果ROS包在Example文件夹中,则改成Example
再打开一个终端运行
source ~/.bashrc
echo ${ROS_PACKAGE_PATH}
如果能正确显示刚刚加入的地址则正常。
(2) 编译代码
配置完成后,在src/ORB_SLAM3目录下打开终端:
chmod +x build_ros.sh
./build_ros.sh
可能的报错:
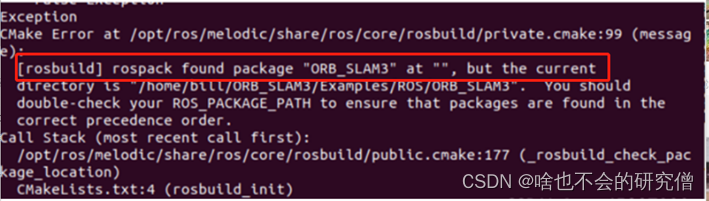
原因:
ORB_SLAM的路径没设置成功,导致定位不到ROS包的路径
解决:
(1) 首先在~/.bashrc文件上上设置路径
添加的代码如下:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/chen/catkin_ws/src/ORB_SLAM3/Examples_old/ROS
其中的路径改成自己的路径即可
生效环境:
source ~/.bashrc
注意:重新执行./build_ros.sh编译,依然报定位不到ROS包的错误,再进行下一步:
(2) 在ROS的安装路径下更改路径
cd /opt/ros/noetic/
sudo gedit setup.bash
添加如下的代码
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/chen/catkin_ws/src/ORB_SLAM3/Examples_old/ROS
其中的路径改成自己的路径即可
生效环境
source setup.bash
没出意外的话,到此,编译ROS环境下的SLAM3源码就已经成功!!!
创作不易,有什么错误的地方,希望大佬们指出,以免误人子第!!!!!
总结
以上就是运行ORB_SLAM的全部详细教程,主要是介绍了关于在ubuntu20.04中运行ORB_SLAM3的所有依赖的库的安装过程,和所遇到的一些报错的解决方法。有什么问题,可以评论区里面交流讨论。如需要已修改过的代码文件,可直接运行的代码,在评论区留言即可。
这篇关于【ORB_SLAM系列4】—— 一文搞定如何在Ubuntu20.04中安装运行ORB_SLAM3(包含ROS版本和非ROS版本)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








