ros专题

ROS - C++实现RosBag包回放/提取
文章目录 1. 回放原理2. 回放/提取 多个话题3. 回放/提取数据包,并实时发布 1. 回放原理 #include <ros/ros.h>#include <rosbag/bag.h>#include <std_msgs/String.h>int main(int argc, char** argv){// 初始化ROS节点ros::init(argc, argv,

ROS - C++实现RosBag包录制
文章目录 1. 录制原理2. 录制多个话题3. 订阅ROS消息,实时录制 1. 录制原理 #include <ros/ros.h>#include <rosbag/bag.h>#include <std_msgs/String.h>int main(int argc, char** argv){// 初始化ROS节点ros::init(argc, argv, "reco

hector_quadrotor编译总结 | ubuntu 16.04 ros-kinetic版本
hector_quadrotor编译总结 | ubuntu 16.04 ros-kinetic版本 基于Ubuntu 16.04 LTS系统所用ROS版本为 Kinetic hector_quadrotor ROS包主要用于四旋翼无人机的建模、控制和仿真。 1.安装依赖库 所需系统及依赖库 Ubuntu 16.04|ros-kinetic|Gazebo|gazebo_ros_pkgs|ge
hector_quadrotor编译总结 | ubuntu 14.04 ros-indigo版本
hector_quadrotor编译总结 | ubuntu 14.04 ros-indigo版本 基于Ubuntu 14.04 LTS系统所用ROS版本为 Indigo hector_quadrotor ROS包主要用于四旋翼无人机的建模、控制和仿真。 备注:两种安装方式可选:install the binary packages | install the source files
Ubuntu20.04+ros-noetic配置Cartographer
一、概述 因为要配置激光SLAM,Cartographer属于激光雷达SLAM 中比较经典的一款,在学习之前先将其在Ubuntu20.04首先配置出来并成功运行demo。 二、具体操作 (一)概述 使用平台是Windows的wsl2上的Ubuntu20.04子系统,双系统与虚拟机的安装原理与这个相同。主要依照的安装操作是官方文档,链接如下所示。 Runni
ROS学习记录-ubuntu系统和ROS的安装
一、ubuntu安装 使用的是ubuntu14.04.4系统,从官网下载,也可以从国内镜像下载。 官网:http://cdimage.ubuntu.com/netboot/14.04/?_ga=1.178505383.2009389272.1483453317 国内镜像 网易:http://mirrors.163.com/ubuntu-releases/14.04/ 厦大:http://

linux(ubuntu)安装QT-ros插件
Linux下的qt安装ros插件 查看qt版本和对应的ros插件版本查看qt版本查看 qt creator 版本 qt creator进行更新升级下载版本对应的ros_qtc_plugin 插件插件安装安装成功 查看qt版本和对应的ros插件版本 想要qt与ros联合开发,我门需要在qt creator中添加ros的插件,之前查资料有哦 一个方法是直接下载安装带有ros插件版本的
roscore等ros命令执行后终端无输出,无反应
现象 在终端中输入 roscore 等 ros 命令,终端无输出,无反应。但是,Ctrl+C后终端还是有输出的。 解决措施 打开.barshrc文件 gedit ~/.bashrc 修改ROS_HOSTNAME和ROS_MASTER_URI变量的赋值语句,如果有ROS_IP变量也需要修改。用 localhost 替代具体的 IP地址。 修改前。 export ROS_HOSTNAM


ROS程序设计系列 - 5.实例helloworld
ROS程序设计系列 - 5.实例helloworld 1. 源由2. 步骤Step 1:安装ROS系统Step 2:创建框架工程Step 3:检查工程结构Step 4:创建CPP文件Step 5:修改配置文件Step 6:编译工程 3. 测试Step 1: 启动ROS CoreStep 2: 启动Hello程序 4. 总结5. 参考资料6. 补充 1. 源由 在做《Ardupil
从turtlebot领会到ROS包安装方式的不同
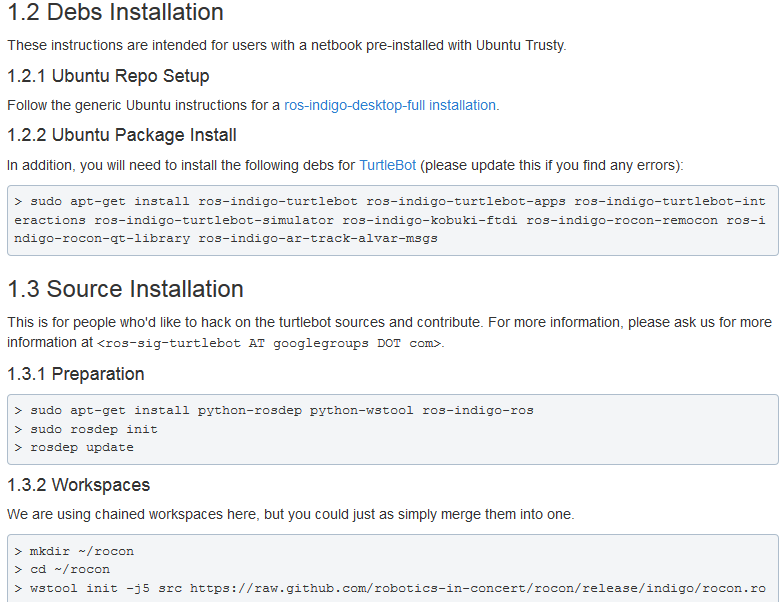
安装ROS包有两种方式,一种是安装Debian包,一种是源文件安装。 1.Debian包的安装方式采用的命令是: $ sudo apt-get install ros-indigo-* 用这种安装包的方式,安装后的文件在/opt/ros/indigo/share下,文件是不能随意修改的。当需要修改相关包的文件时,需要cd到相应的包下,然后采用sudo管理员权限修改。 2.源码安装: 源码

论文速读|ROS-LLM:具有任务反馈和结构化推理的具身智能ROS 框架
论文地址:https://arxiv.org/pdf/2406.19741 ROS-LLM 框架旨在通过集成大型语言模型(LLM)和机器人操作系统(ROS),实现对机器人的直观编程。该框架支持通过聊天界面接收自然语言提示,并能够根据 ROS 环境中的传感器读数自动提取和执行行为。框架支持三种行为模式:序列、行为树和状态机。此外,通过模仿学习,用户可以向系统添加新的机器人动作。该研究通过实验

ROS Simulink 支持与限制
ROS Simulink 支持与限制 ROS 工具箱在 Simulink® 中不支持以下 ROS 功能: ROS 服务 服务器ROS 动作 如果您的应用需要这些功能,建议使用 MATLAB® ROS 功能。您可以使用 MATLAB 编写一个 ROS 节点,该节点可以将服务、动作和变换树发布到一个主题作为 ROS 消息。然后,Simulink 可以订阅该主题以处理这些消息。在 MATLAB 中
Azure_Kinect_ROS版编译及IMU参数标定.
Azure_Kinect_ROS版编译 参照官方文档:https://github.com/microsoft/Azure_Kinect_ROS_Driver/blob/melodic/docs/building.md 编译. 如果是ubuntu18.04等通过命令行安装SDK的,应该可以轻松编译成功.但是如果是在16.04上安装的(安装方法参照https://blog.csdn.net/u01
ROS tiff4.0 这个不是版本问题,只是没有找到库文件的连接错误。
/opt/ros/kinetic/lib/x86_64-linux-gnu/libopencv_imgcodecs3.so.3.3.1:对‘TIFFReadRGBAStrip@LIBTIFF_4.0’未定义的引用 /opt/ros/kinetic/lib/x86_64-linux-gnu/libopencv_imgcodecs3.so.3.3.1:对‘TIFFReadDirectory@LIBT
![使用Protobuf来定义ROS消息格式[C++/Python]](https://i-blog.csdnimg.cn/blog_migrate/fe88c6910289788c7e8baa9b7432d74c.png#pic_center)
使用Protobuf来定义ROS消息格式[C++/Python]
一般我们自定义ROS消息使用ros_msgs来定义的,但是考虑到proto在传输消息优于ros自定义的消息格式,我们这里使用proto来定义ros消息 问题来源:之前看apollo的代码,就发现里面的消息使用proto来传输的,那我们我们自己用如何定义和使用呢,主要参考代码https://github.com/ApolloAuto/apollo-platform仓库里面的ros下面的pb_msgs

ROS - Turtle Nest 使用说明
系列文章目录 前言 正如乌龟巢是小乌龟的出生地一样,ROS 2 Turtle Nest 也是新 ROS 软件包诞生和发展的地方。 Turtle Nest 为创建新的 ROS 软件包提供了一个简单的图形用户界面,简化了软件包的创建过程。 一、为什么使用 Turtle Nest 而不是 “ros2 pkg create ”命令? 简单易用-
Jetson AGX Xavier避坑指南(三)——环境搭建1.(python3、pip、virtualenv、ros)_转载
原文网址如下:https://blog.csdn.net/zxxxiazai/article/details/103419986

使用 ROS 集成 MQTT 的远程机器人驱动框架
这篇论文的标题是《使用 ROS 集成 MQTT 的远程机器人驱动框架》。以下是对论文主要内容的整理: 摘要 论文提出了一个框架,通过将机器人操作系统(ROS)与消息队列遥测传输(MQTT)协议集成,使用户能够从任何互联网连接的设备远程指挥和驱动机器人。 论文标题: "A Framework for Remote Robot Actuation using ROS Integrated wit
ROS naviagtion analysis: costmap_2d--ObstacleLayer
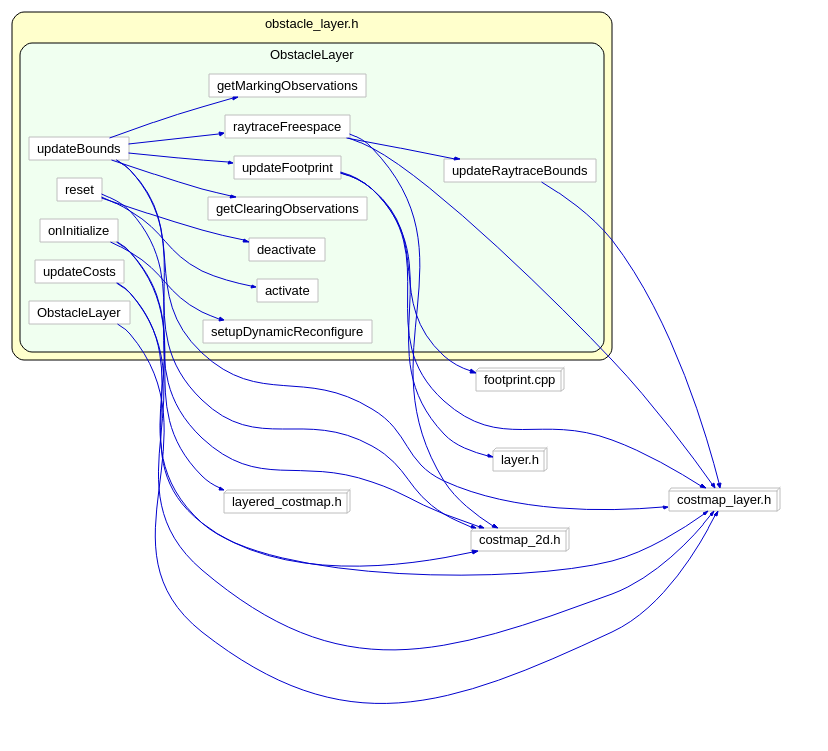
构造函数 ObstacleLayer(){costmap_ = NULL; // this is the unsigned char* member of parent class Costmap2D.这里指明了costmap_指针保存了Obstacle这一层的地图数据} 对于ObstacleLater,首先分析其需要实现的Layer层的方法: virtual void o
ROS naviagtion analysis: costmap_2d--StaticLayer
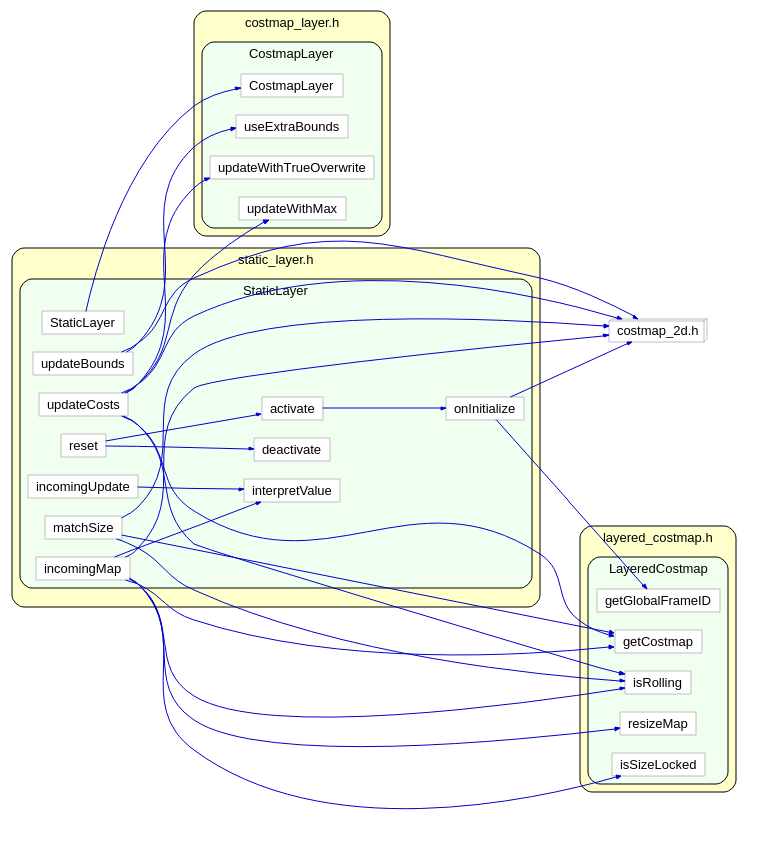
从UML中能够看到,StaticLayer主要是在实现Layer层要求实现的接口。 virtual void onInitialize();virtual void activate();virtual void deactivate();virtual void reset();virtual void updateBounds(double robot_x, double rob
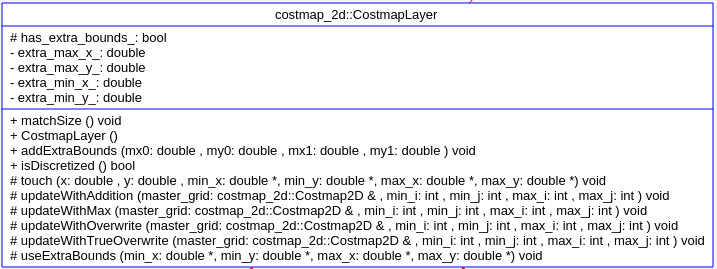
ROS naviagtion analysis: costmap_2d--CostmapLayer
这个类是为ObstacleLayer StaticLayer voxelLayer 这种维护了自己所在层的地图数据的类,提供了一些公共的操作方法。 从UML中可以看到,这个类提供了以下方法,这些方法的参数列表均为(costmap_2d::Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j) updateWit
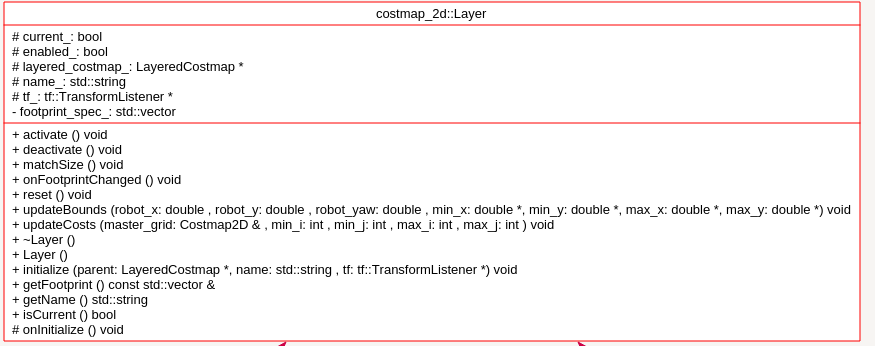
ROS naviagtion analysis: costmap_2d--Layer
这个类中有一个LayeredCostmap* layered_costmap_数据成员,这个数据成员很重要,因为这个类就是通过这个指针获取到的对master map的操作。没有这个指针,所有基于Layer继承下去的地图的类,都无法操作master map。 这个类基本上没有什么实质性的操作,主要是提供了统一的接口,要求子类必须实现这些方法。这样plugin使用的时候,就可以不用管具体是什么类
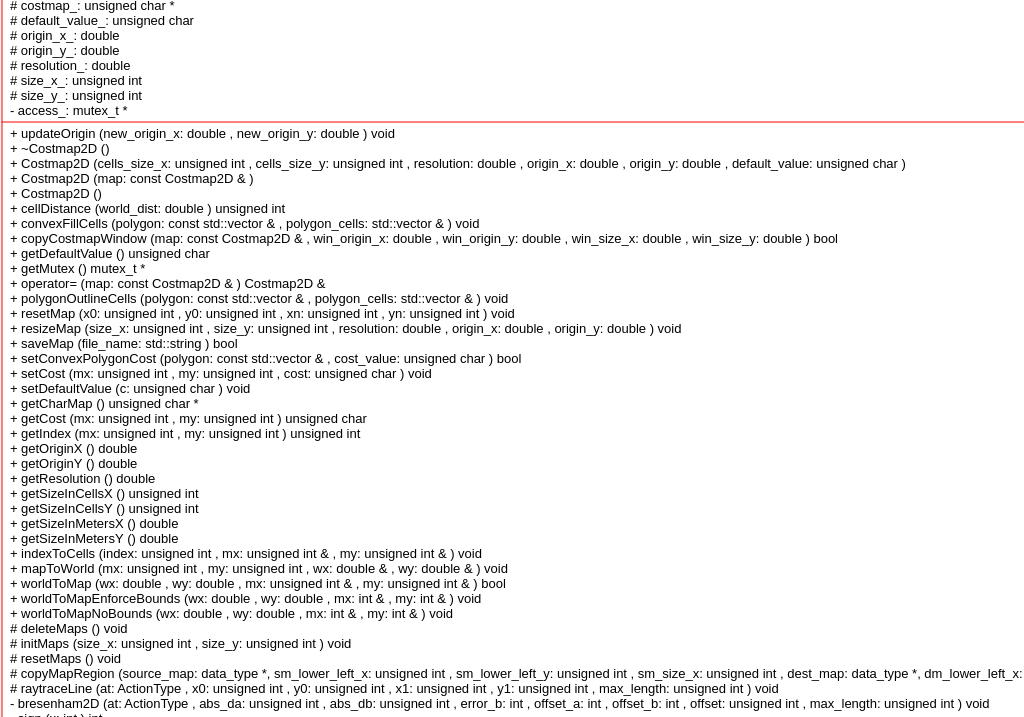
ROS naviagtion analysis: costmap_2d--Costmap2D
Costmap2D是存储地图数据的父类。真正的地图数据就存储在数据成员unsigned char *costmap_ 。 首先,分析类的构造函数: 默认构造函数:Costmap2D::Costmap2D() : // just initialize everything to NULL by defaultCostmap2D::Costmap2D() :size_x_(0), si
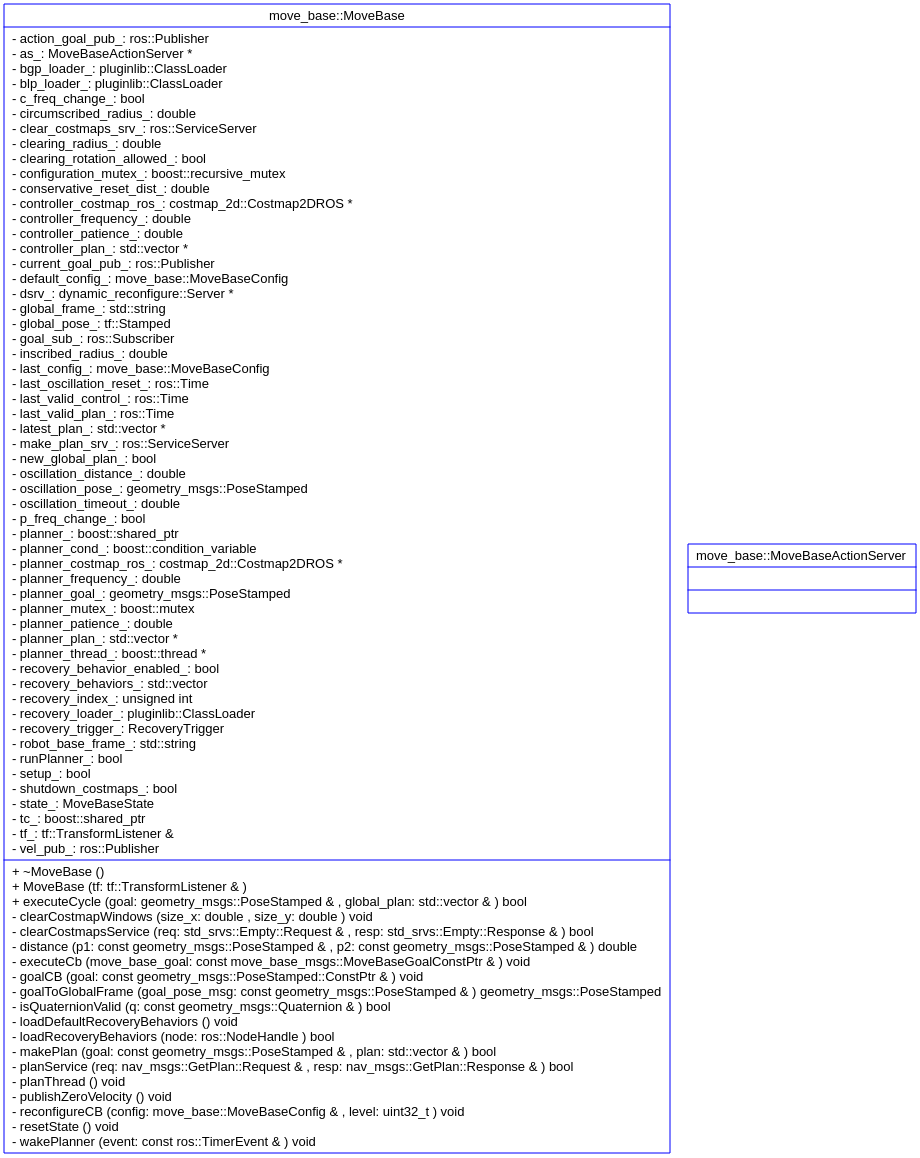
ROS naviagtion analysis: move_base
这是navigation的第一篇文章,主要通过分析ROS代码级实现,了解navigation。本文从move_base入手。 机器人导航主要框架如图: Navigation Stack主要组成部分:move_base: 用户调用movebase是通过传入带tf参数的构造函数: move_base::MoveBase move_base( tf ); 以下分析move_base