本文主要是介绍ROS naviagtion analysis: costmap_2d--CostmapLayer,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
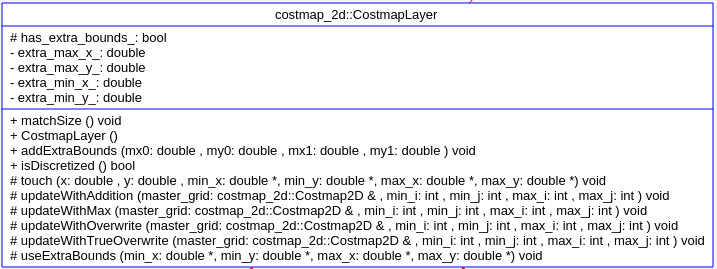
这个类是为ObstacleLayer StaticLayer voxelLayer 这种维护了自己所在层的地图数据的类,提供了一些公共的操作方法。
从UML中可以看到,这个类提供了以下方法,这些方法的参数列表均为(costmap_2d::Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j)
updateWithTrueOverwrite
updateWithOverwrite
updateWithMax
updateWithAddition这些成员函数都是为本层的地图,如何更新数据到master map上的一些更新方法。这里调一个例子说明:
void CostmapLayer::updateWithOverwrite(costmap_2d::Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j)
{if (!enabled_)return;这篇关于ROS naviagtion analysis: costmap_2d--CostmapLayer的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!