costmap专题
ROS naviagtion analysis: costmap_2d--ObstacleLayer
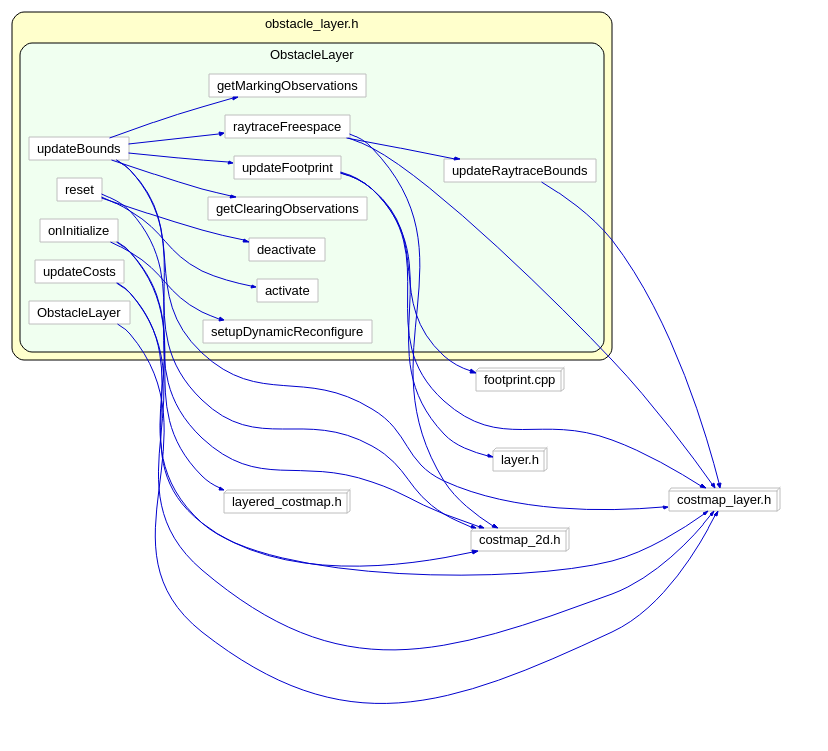
构造函数 ObstacleLayer(){costmap_ = NULL; // this is the unsigned char* member of parent class Costmap2D.这里指明了costmap_指针保存了Obstacle这一层的地图数据} 对于ObstacleLater,首先分析其需要实现的Layer层的方法: virtual void o
ROS naviagtion analysis: costmap_2d--StaticLayer
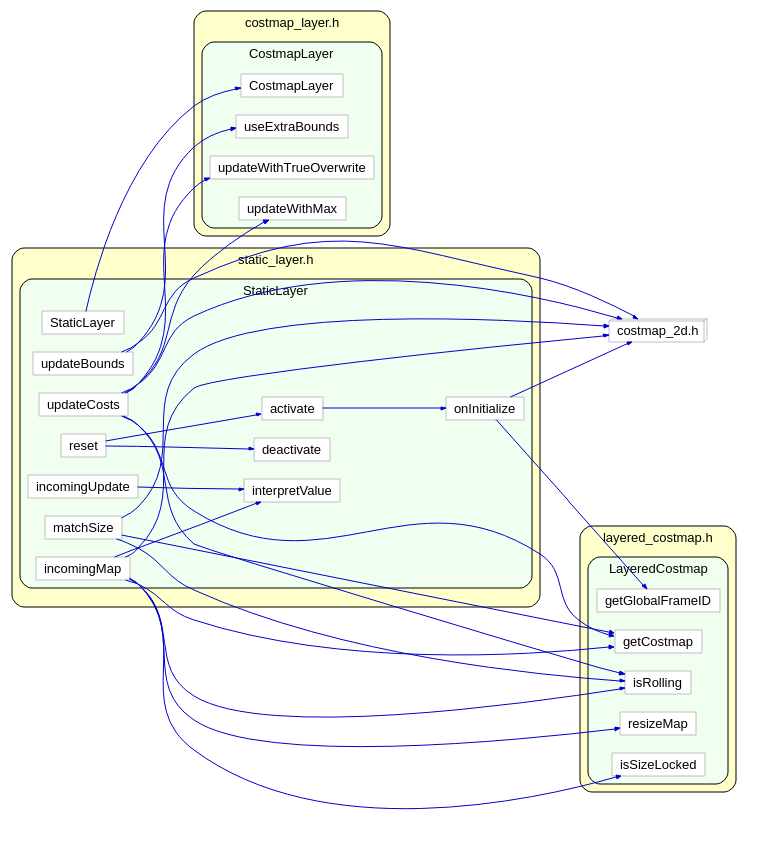
从UML中能够看到,StaticLayer主要是在实现Layer层要求实现的接口。 virtual void onInitialize();virtual void activate();virtual void deactivate();virtual void reset();virtual void updateBounds(double robot_x, double rob
ROS naviagtion analysis: costmap_2d--CostmapLayer
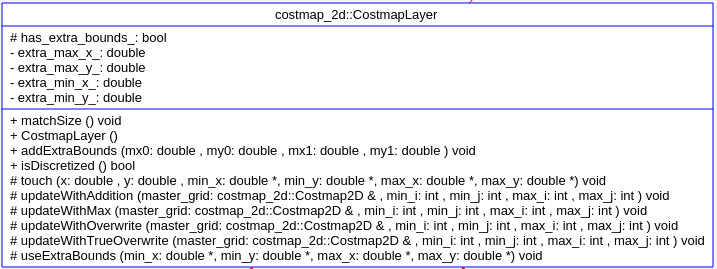
这个类是为ObstacleLayer StaticLayer voxelLayer 这种维护了自己所在层的地图数据的类,提供了一些公共的操作方法。 从UML中可以看到,这个类提供了以下方法,这些方法的参数列表均为(costmap_2d::Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j) updateWit
ROS naviagtion analysis: costmap_2d--Layer
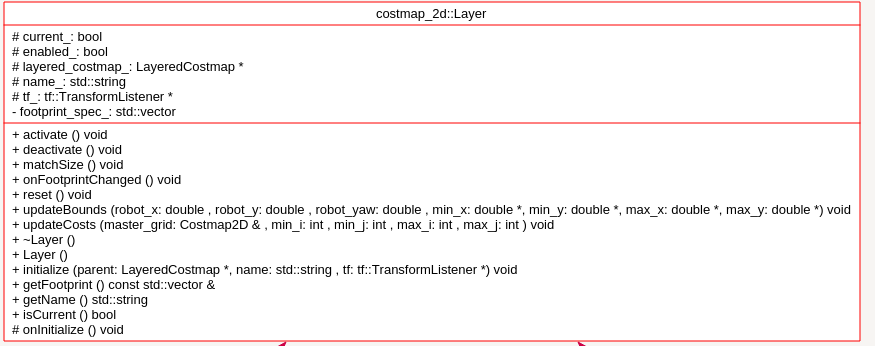
这个类中有一个LayeredCostmap* layered_costmap_数据成员,这个数据成员很重要,因为这个类就是通过这个指针获取到的对master map的操作。没有这个指针,所有基于Layer继承下去的地图的类,都无法操作master map。 这个类基本上没有什么实质性的操作,主要是提供了统一的接口,要求子类必须实现这些方法。这样plugin使用的时候,就可以不用管具体是什么类
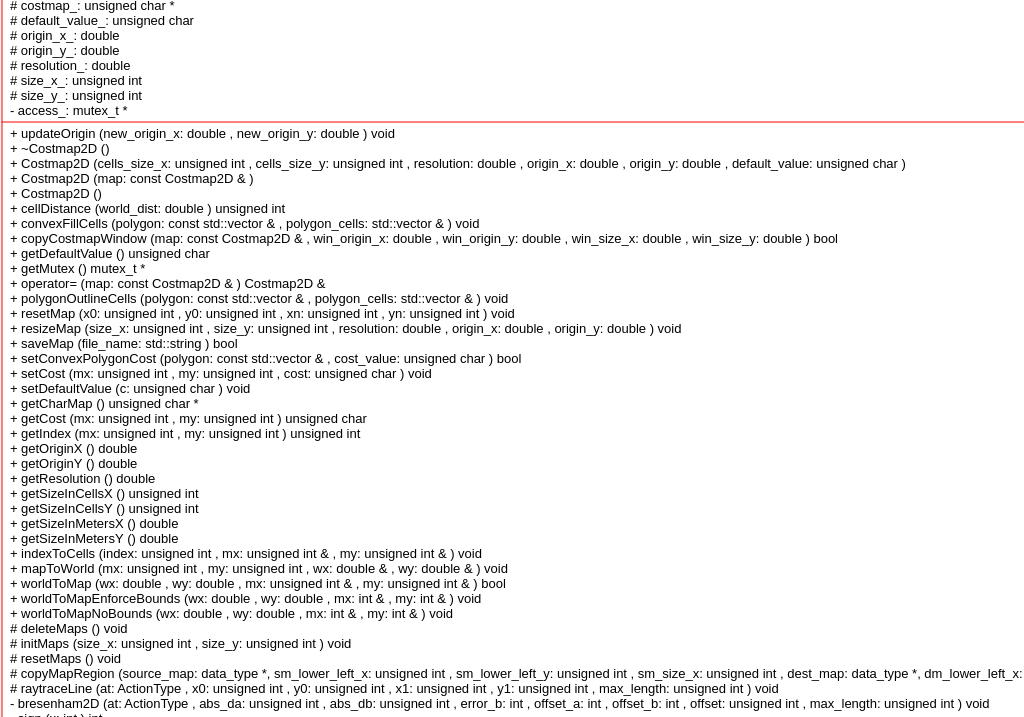
ROS naviagtion analysis: costmap_2d--Costmap2D
Costmap2D是存储地图数据的父类。真正的地图数据就存储在数据成员unsigned char *costmap_ 。 首先,分析类的构造函数: 默认构造函数:Costmap2D::Costmap2D() : // just initialize everything to NULL by defaultCostmap2D::Costmap2D() :size_x_(0), si

机器人规划算法——基于A-star和CostMap膨胀地图的全局规划(附Github源码链接)
前言 这段时间,笔者用c++写了一套机器人局部避障算法,并工程落地,机器人可以正常避障,避障所采用的技术方案是A*+TEB算法。并取得一定成果,后续还要针对复杂的场景继续优化。主要涉及到技术模块有: (1) costmap:代价地图模块,分为静态层和障碍物层以及膨胀层,静态层将读取地图信息并根据机器人内切半径进行膨胀,障碍物层是根据搭载的传感器检测到的障碍物点云并且以机器人内切圆半径进行膨胀。

ROS 导航定位调试过程及costmap中添加障碍物
ROS导航定位调试过程及costmap中添加障碍物 第一次在csdn写博客,先试试水。 最近在做slam,本来是先做的vslam中的orbslam,跑的效果不错,在产品上应用感觉还要增加imu,即采用vio。后来由于项目需求,快速跑通了ROS的导航、定位框架,gmapping建图,movebase定位、路径规划、导航、避障。这个过程需要激光和里程计即可,架构明晰。 (1)保存地图 在

fatal error: costmap_2d/keepOutZone.h
fatal error: costmap_2d/keepOutZone.h: No such file or directory 7 | #include "costmap_2d/keepOutZone.h" 解决: #include "costmap_plugins/keepOutZone.h"代码中搜索 costmap_2d,全部替换成costmap_plugin
ROS 进阶学习笔记(16):ROS导航1:关于Costmap_2d Package (代价地图包)
=== 关于Costmap_2d Package === wiki page: http://wiki.ros.org/costmap_2d === 我遇到的问题是 obstacle layer的刷新频率太低 === costmap_2d包下的所有类文档:http://docs.ros.org/hydro/api/costmap_2d/html/annotated.html 其中,值
机器人导航算法——Costmap地图ROS源码解析
文章目录 前言一、move_base:Costmap程序的执行入口二、costmap初始化和维护三、costmap地图1.costmap膨胀层InflationLayer2.costmap障碍物obstacleLayer3.costmap静态层staticLayer 四、如何使用地图用于逻辑处理(如规划)总结 前言 本文将从move_base主程序开始,对costmap的原理

【ROS】Nav2源码之nav2_costmap_2d详解
【ROS】郭老二博文之:ROS目录 1、简述 nav2_costmap_2d包负责构建环境的2D成本图costmap,它由几个描述环境的“层(layers)”数据叠加而成。 它可以通过地图服务器或本地滚动窗口初始化,并通过从传感器获取观测数据来更新层。 nav2_costmap_2d也使用了插件,通过插件接口可以将层组合到成本图costmap中,并最终通过基于机器人足迹的膨胀半径进行膨胀。

ROS从入门到精通6-4:costmap代价地图插件编写案例(prohibition_layer)
目录 0 专栏介绍1 为什么需要代价地图插件?2 自定义代价地图插件3 仿真测试 0 专栏介绍 本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机器人建模和应用ROS进行实际项目的开发和调试的工程能力。 🚀详情:《ROS从入门到精通》 1 为什么需要代价地图插件? 在ROS从入门到精通6-1:图文详解代价地图costmap原理与配置中,我们指出代

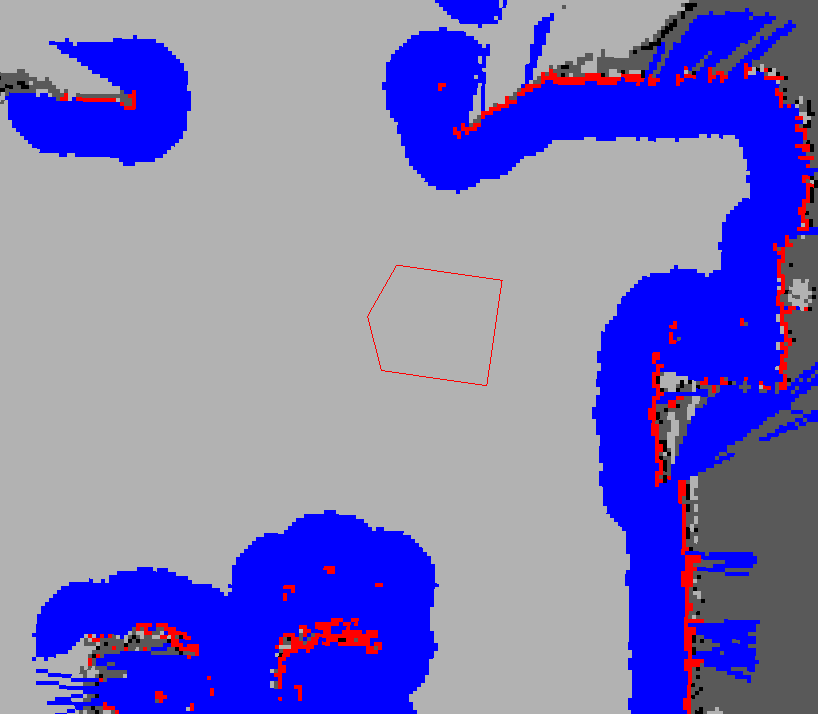
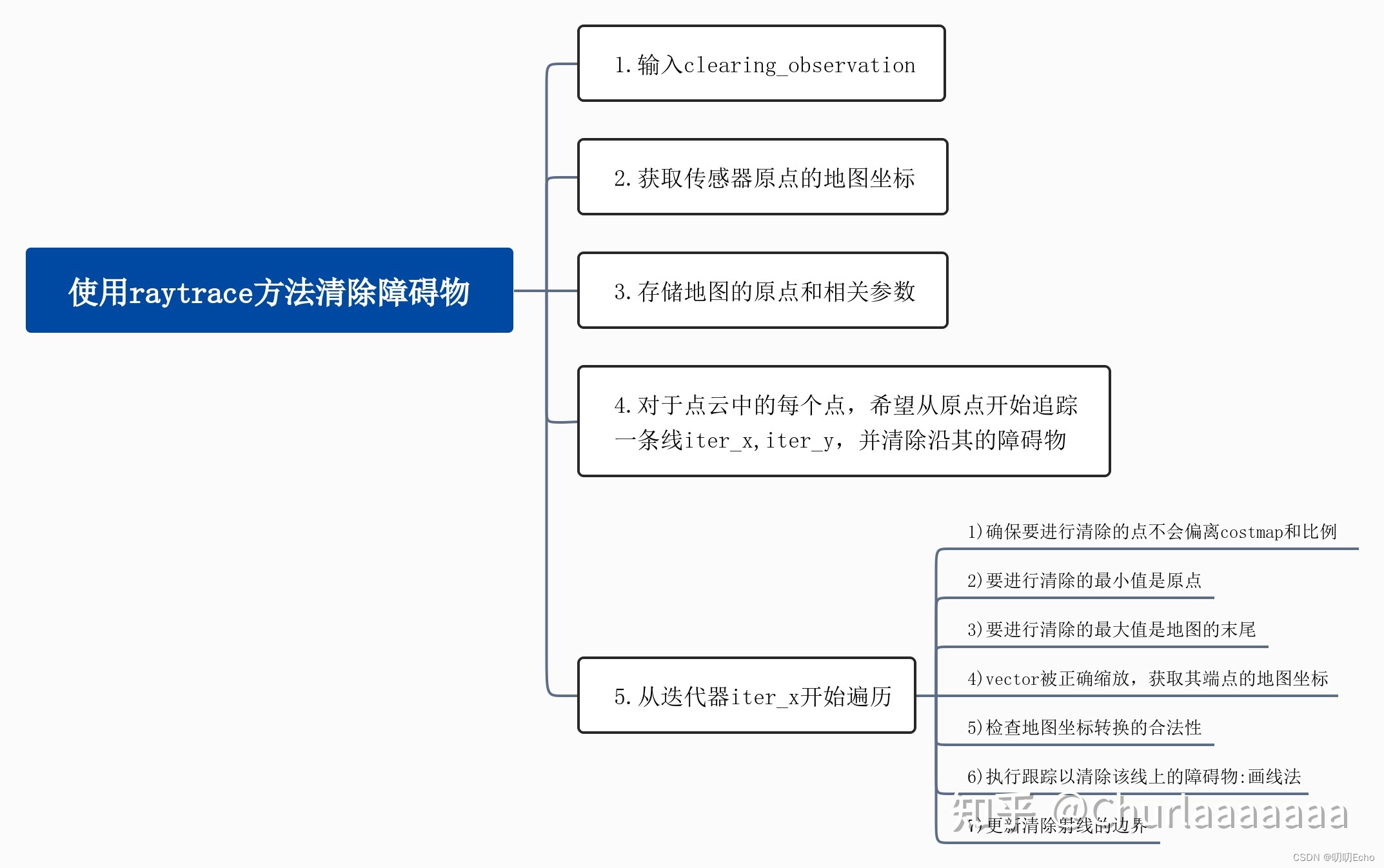
costmap_2d: obstacle_layer中关于激光雷达障碍物清除不干净的解决
参考: ROS naviagtion analysis: costmap_2d–ObstacleLayerROS Navigation Stack之costmap_2d源码分析ROS 中obstacle_layer由于激光雷达测距的局限性,导致costmap中障碍物不能被及时清除。 总的来说是,使用navigation导航时,会出现由于激光雷达测距的局限性, 会导致costmap上有行人走
costmap_2d 之 obstacle layer
obstacle layer obstacle_layer作为一个地图层,具备基本的更新边界和更新代价的功能,同时由于该层负责处理障碍物,于是衍生了一些接收障碍物数据的回调函数,比如激光回调函数,点云回调函数。 对于ObstacleLater,首先分析其需要实现的Layer层的方法: virtual void onInitialize();virtual void updat