本文主要是介绍ROS naviagtion analysis: costmap_2d--ObstacleLayer,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
构造函数
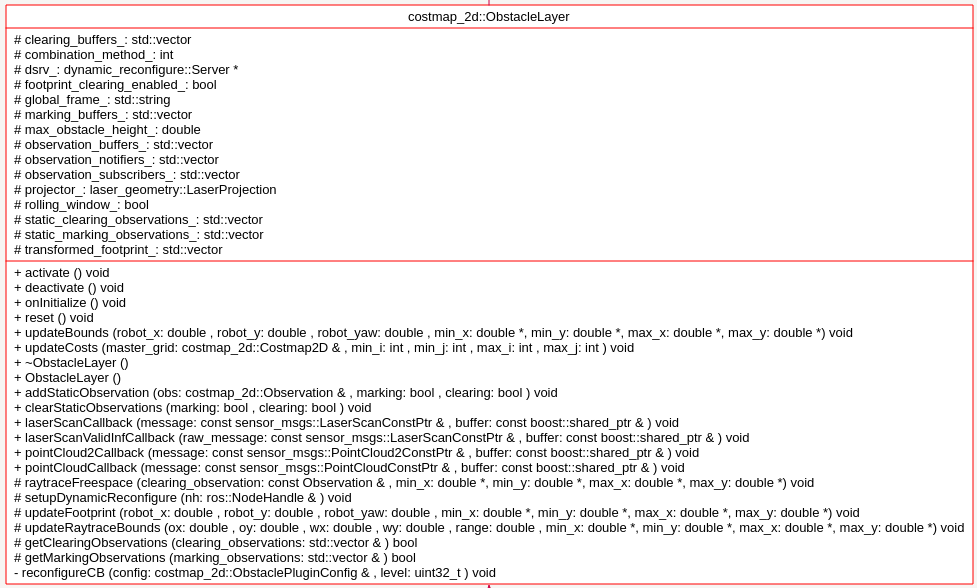
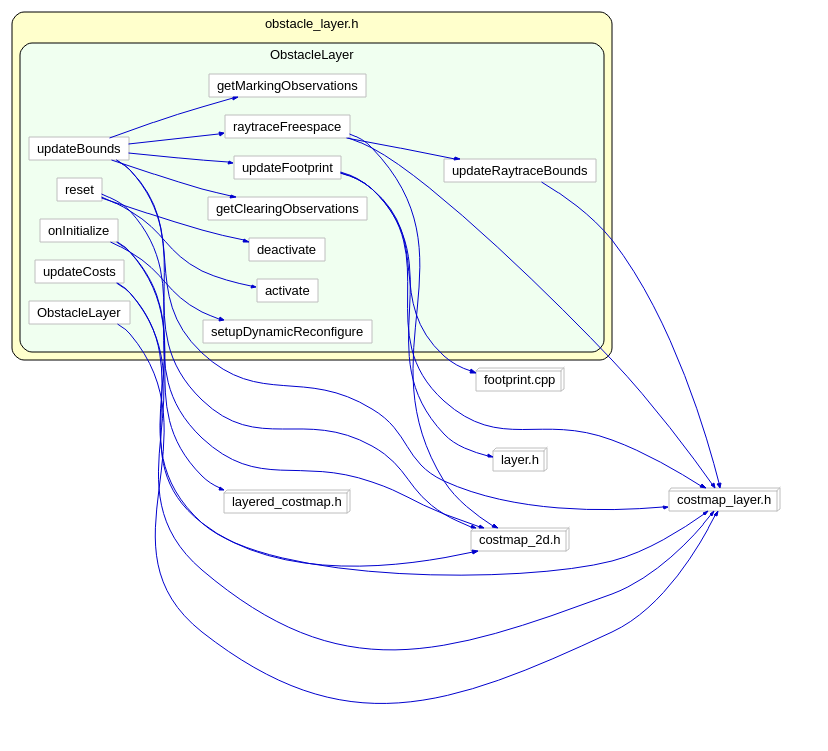
ObstacleLayer(){costmap_ = NULL; // this is the unsigned char* member of parent class Costmap2D.这里指明了costmap_指针保存了Obstacle这一层的地图数据}对于ObstacleLater,首先分析其需要实现的Layer层的方法:
virtual void onInitialize();virtual void updateBounds(double robot_x, double robot_y, double robot_yaw, double* min_x, double* min_y,double* max_x, double* max_y);virtual void updateCosts(costmap_2d::Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j);virtual void activate();virtual void deactivate();virtual void reset();函数 onInitialize();:
首先获取参数设定的值,然后新建observation buffer:
// create an observation buffer
observation_buffers_.push_back(boost::shared_ptr < ObservationBuffer>(new ObservationBuffer(topic, observation_keep_time, expected_update_rate, min_obstacle_height,max_obstacle_height, obstacle_range, raytrace_range, *tf_, global_frame_,sensor_frame, transform_tolerance)));// check if we'll add this buffer to our marking observation buffersif (marking)marking_buffers_.push_back(observation_buffers_.back());// check if we'll also add this buffer to our clearing observation buffersif (clearing)clearing_buffers_.push_back(observation_buffers_.back());然后分别对不同的sensor类型如LaserScan PointCloud PointCloud2,注册不同的回调函数。这里选LaserScan 分析其回调函数:
void ObstacleLayer::laserScanCallback(const sensor_msgs::LaserScanConstPtr& message,const boost::shared_ptr<ObservationBuffer>& buffer)
{// project the laser into a point cloudsensor_msgs::PointCloud2 cloud;cloud.header = message->这篇关于ROS naviagtion analysis: costmap_2d--ObstacleLayer的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!