analysis专题

Versioned Staged Flow-Sensitive Pointer Analysis
VSFS 1.Introduction2.Approach2.1.相关概念2.2.VSFS 3.Evaluation参考文献 1.Introduction 上一篇blog我介绍了目前flow-sensitive pointer analysis常用的SFS算法。相比IFDS-based方法,SFS显著通过稀疏分析提升了效率,但是其内部依旧有许多冗余计算,留下了很大优化空间。 以

OpenCV_连通区域分析(Connected Component Analysis-Labeling)
申明:本文非笔者原创,原文转载自:http://blog.csdn.net/icvpr/article/details/10259577 OpenCV_连通区域分析(Connected Component Analysis/Labeling) 【摘要】 本文主要介绍在CVPR和图像处理领域中较为常用的一种图像区域(Blob)提取的方法——连通性分析法(连通区域标

MATH36022 Numerical Analysis 2 Approximation of Functions – Week 3 Exercises
Show that the Chebyshev polynomials are orthogonal on ( − 1 , 1 ) (−1, 1) (−1,1) with respect to the weight function ( 1 − x 2 ) − 1 / 2 (1 − x^2)^{−1/2} (1−x2)−1/2. Ans: T n ( x ) = cos ( n arcc

《Data Structure Algorithm Analysis in C》Chap.10笔记
5大算法:贪婪 Greedy,分治 Divide and conquer,动态规划 Dynamic Programming,随机 Randomized,回溯 Backtracking。 每一个小节都是一个具体的问题,应当仔细看,待看的:10.2.2-4,10.3,10.4.3,10.5.2。
05.德国博士练习_06_mapping_analysis
文章目录 1. exercise01: mapping multi-fields2. exercise02: nested and join mapping3. exercise03: custom analyzer 1. exercise01: mapping multi-fields # ** EXAM OBJECTIVE: MAPPINGS AND TEXT ANALYS

MATH36022 Numerical Analysis 2 Approximation of Functions – Week 2 Exercises
Attempt these exercises in advance of the tutorial in Week 3 Find the best L ∞ L_\infin L∞ approximation to f ( x ) = x n + 1 + ∑ k = 0 n a k x k f (x) = x^{n+1} + \sum_{k=0}^na_kx^k f(x)=xn+1+∑k=
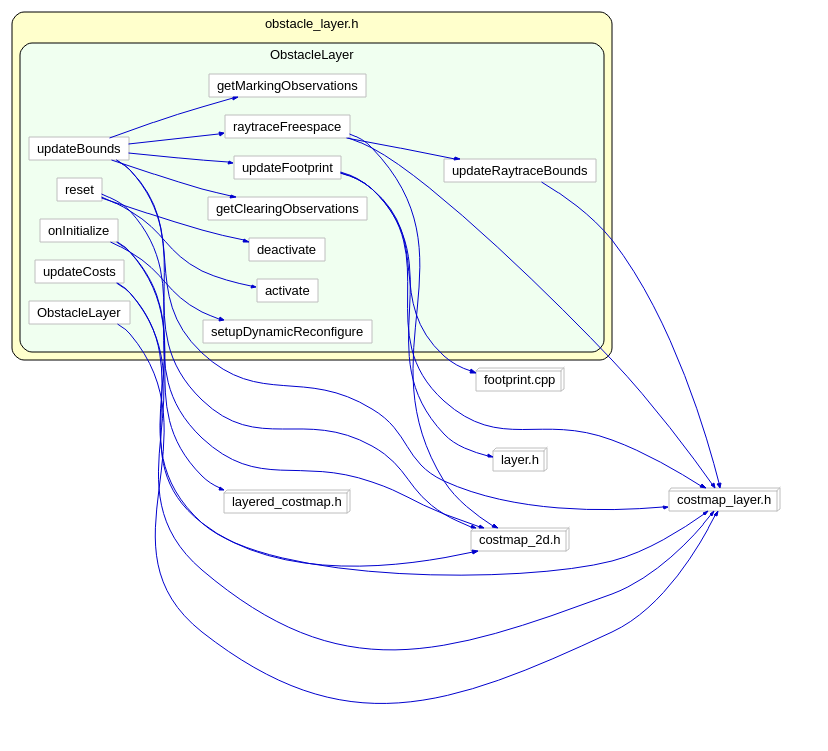
ROS naviagtion analysis: costmap_2d--ObstacleLayer
构造函数 ObstacleLayer(){costmap_ = NULL; // this is the unsigned char* member of parent class Costmap2D.这里指明了costmap_指针保存了Obstacle这一层的地图数据} 对于ObstacleLater,首先分析其需要实现的Layer层的方法: virtual void o
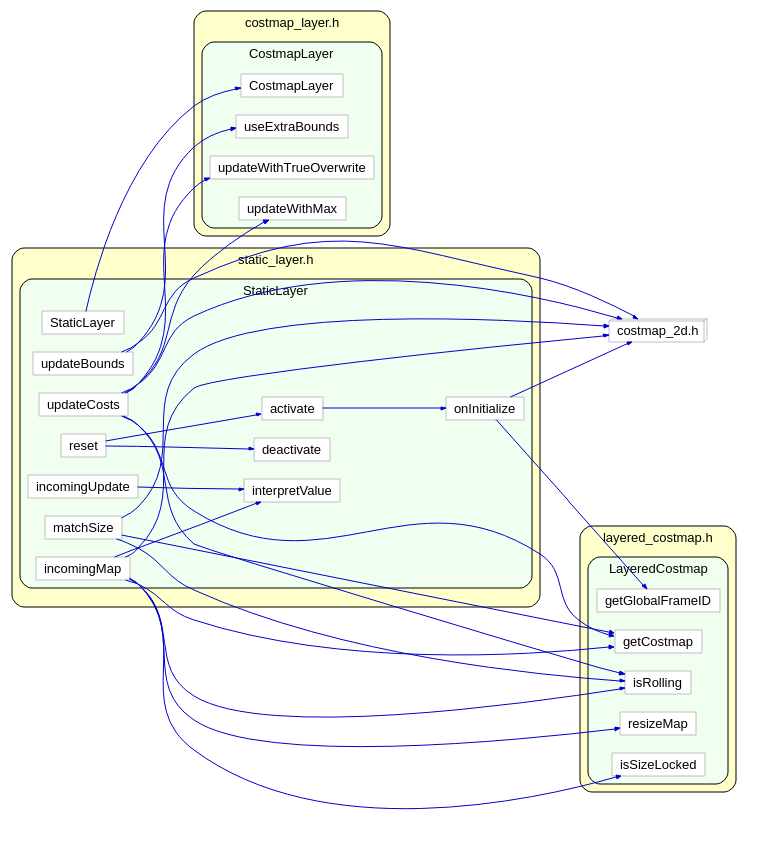
ROS naviagtion analysis: costmap_2d--StaticLayer
从UML中能够看到,StaticLayer主要是在实现Layer层要求实现的接口。 virtual void onInitialize();virtual void activate();virtual void deactivate();virtual void reset();virtual void updateBounds(double robot_x, double rob
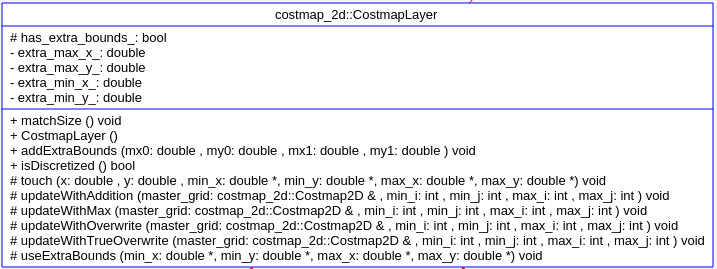
ROS naviagtion analysis: costmap_2d--CostmapLayer
这个类是为ObstacleLayer StaticLayer voxelLayer 这种维护了自己所在层的地图数据的类,提供了一些公共的操作方法。 从UML中可以看到,这个类提供了以下方法,这些方法的参数列表均为(costmap_2d::Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j) updateWit
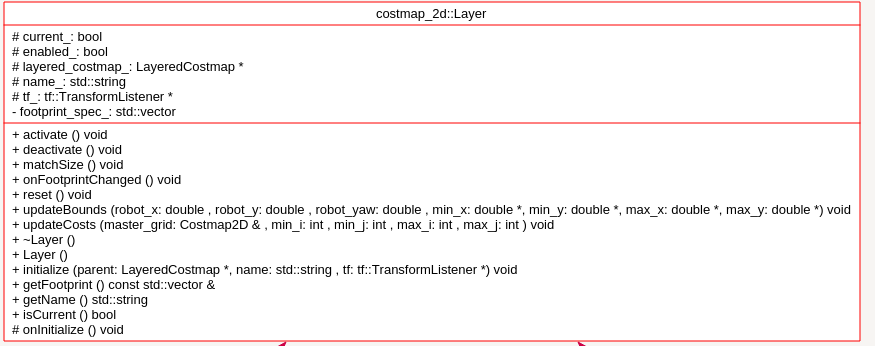
ROS naviagtion analysis: costmap_2d--Layer
这个类中有一个LayeredCostmap* layered_costmap_数据成员,这个数据成员很重要,因为这个类就是通过这个指针获取到的对master map的操作。没有这个指针,所有基于Layer继承下去的地图的类,都无法操作master map。 这个类基本上没有什么实质性的操作,主要是提供了统一的接口,要求子类必须实现这些方法。这样plugin使用的时候,就可以不用管具体是什么类
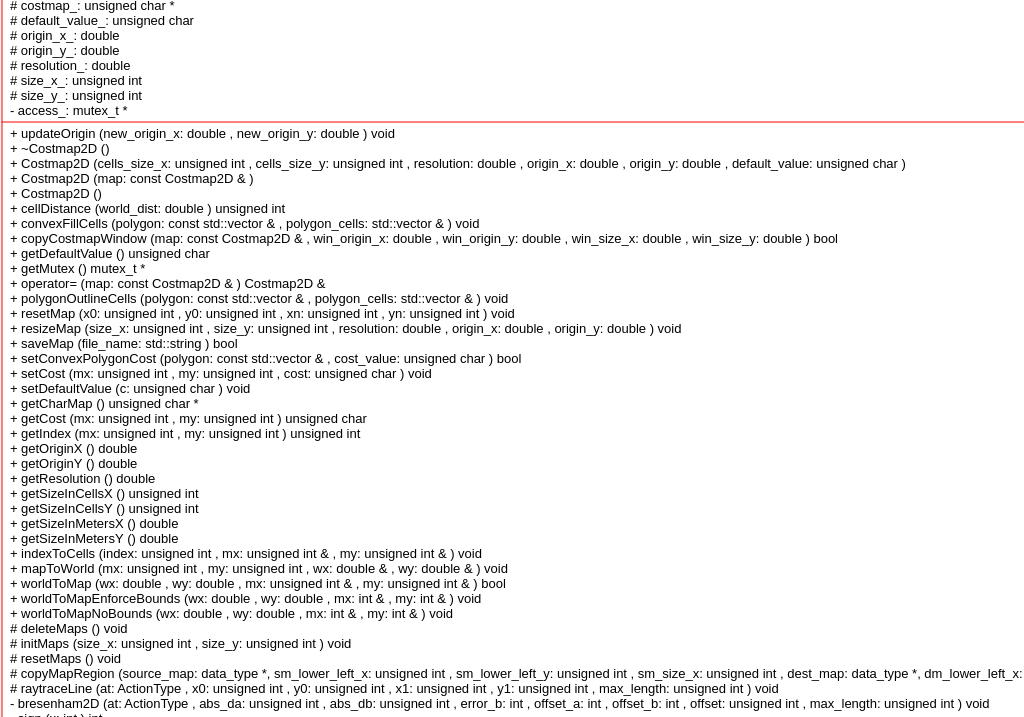
ROS naviagtion analysis: costmap_2d--Costmap2D
Costmap2D是存储地图数据的父类。真正的地图数据就存储在数据成员unsigned char *costmap_ 。 首先,分析类的构造函数: 默认构造函数:Costmap2D::Costmap2D() : // just initialize everything to NULL by defaultCostmap2D::Costmap2D() :size_x_(0), si
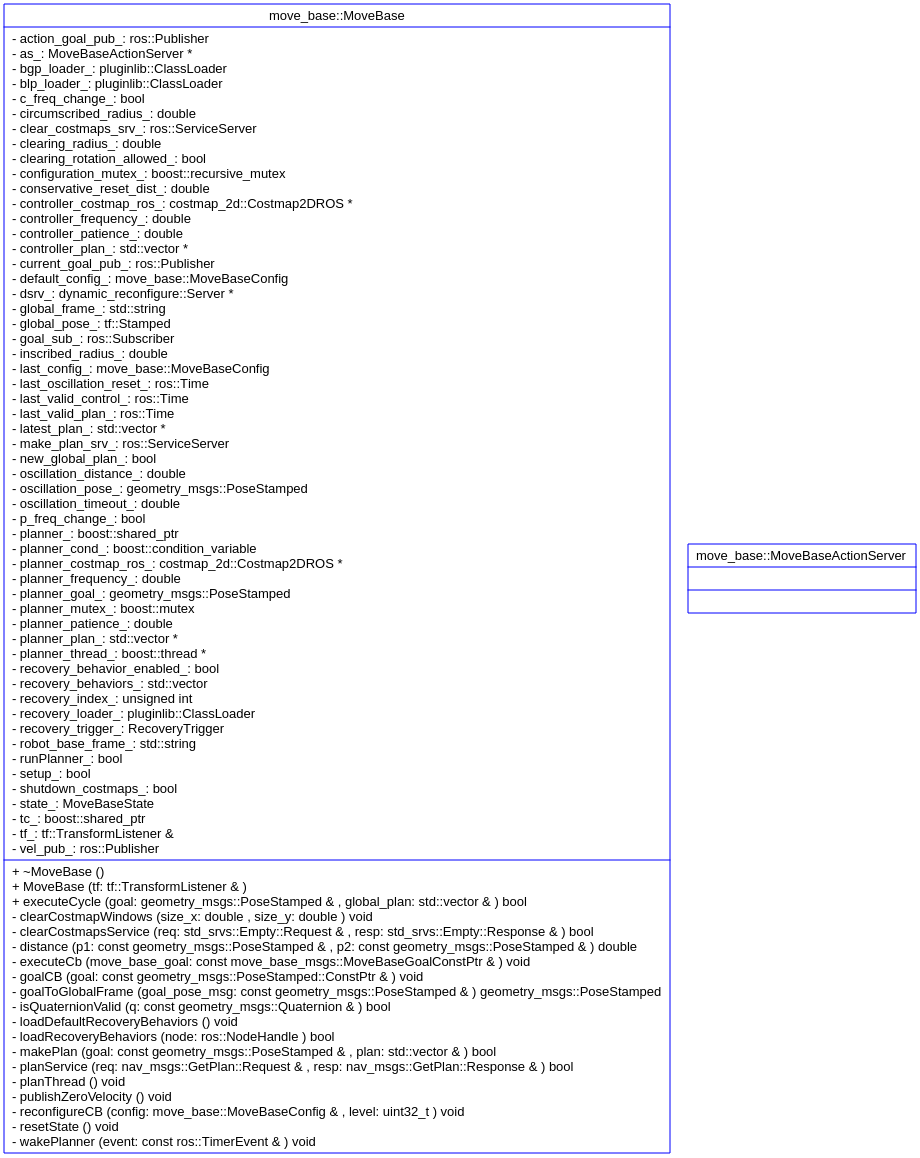
ROS naviagtion analysis: move_base
这是navigation的第一篇文章,主要通过分析ROS代码级实现,了解navigation。本文从move_base入手。 机器人导航主要框架如图: Navigation Stack主要组成部分:move_base: 用户调用movebase是通过传入带tf参数的构造函数: move_base::MoveBase move_base( tf ); 以下分析move_base

cartographer analysis - second chapter
第一章中的代码是ros-cartographer,实现了对cartographer的调用。通过trajectory_builder_ 的AddHorizontalLaserFan ,AddLaserFan3D ,AddImuData 方法向cartographer提供了传感器数据。 trajectory_builder_ 属于类 GlobalTrajectoryBuilderInterface.

cartographer analysis - first chapter
为了分析这个代码的运行原理,首先切到最初的版本,这样的简化代码有利于理解cartographer的运行基本方式。 如上是cartographer的调用入口。 Node 是一个类,run 函数调用了Node的三个接口:构造函数,以及SpinForever, Initialize. 可以看到仅开放了main函数调用的方法。 Initialize()方法: 1. subscribe t
cartographer source analysis
颓废了快半年了,换了工作,该重新开始对优秀代码的分析之旅了,最近好多想分析的代码没来得及看。 继上一次对ROS navigation的分析之后,接下来推出对google的cartographer源码分析。搜了一遍,没见到满意的源码分析,失望啊。 半年不上blog ,罪过罪过

三种评估金融风险的方法的具体Python实现:Stress Testing、Scenario Analysis和Sensitivity Analysis
Stress Testing、Scenario Analysis和Sensitivity Analysis是金融领域中用于评估风险和确定模型或系统在极端条件下表现的三种分析方法。 1. Stress Testing(压力测试): - 压力测试是一种评估金融模型、投资组合或金融机构在极端市场条件下表现的方法。 - 它通常用于识别潜在的风险点,确保在市场压力下,资产或机构能够维持其功能。
50个BA分析工具第九个-Decision Analysis
知识卡片 工具名称: Decision Analysis(决策分析) 工具介绍: BA的工作之一就是要协助业务部门的决策分析。因为BA是不能做决策的。BA只能协助业务部门做决策,所以就会用到决策分析。 解决问题: • 非常正式的去评估一个问题以及可能的决策,并且确定这个决策带来了结果是什么,后果是什么。 优点: • 它是一个非常教条的、非常的规范性的方法来确定不同的

ICAIndependent Component Analysis与fMRI
From https://pnrc.cchmc.org/files/documents/summer-training-course/01_GIFT_FNC_yw.pdf ICA(独立成分分析) finds the independent components (also called factors, latent variables or sources) by maximizing the
【C#】【EXCEL】Bumblebee/Components/Analysis/GH_Ex_Ana_CondAverage.cs
Bumblebee/Components/Analysis/GH_Ex_Ana_CondAverage.cs 这段代码定义了一个名为 GH_Ex_Ana_CondAverage 的类,它是一个 Grasshopper 组件。这个组件的主要功能是为 Excel 工作表中的一个范围添加基于平均值的’条件格式’。以下是对这个组件的功能和特点的详细介绍: 组件名称和描述: 名称:Conditiona
【C#】【EXCEL】Bumblebee/Components/Analysis/GH_Ex_Ana_CondBetween.cs
这段代码定义了一个名为 GH_Ex_Ana_CondBetween 的 Grasshopper 组件,其主要功能是为 Excel 工作表中的特定范围添加条件格式。具体来说: 功能概述: 为 Excel 中的数据范围添加基于区间值的条件格式允许用户自定义高亮颜色提供选项来反转条件(高亮区间外的值)可以清除现有的条件格式可以控制是否激活条件格式 输入参数: 工作表数据范围数据区间(用于评估的数值

TCP Analysis Flags 之 TCP ACKed unseen segment
前言 默认情况下,Wireshark 的 TCP 解析器会跟踪每个 TCP 会话的状态,并在检测到问题或潜在问题时提供额外的信息。在第一次打开捕获文件时,会对每个 TCP 数据包进行一次分析,数据包按照它们在数据包列表中出现的顺序进行处理。可以通过“Analyze TCP sequence numbers”TCP 解析首选项启用或禁用此功能。 TCP 分析展示 在数据包文件中进行 TCP 分
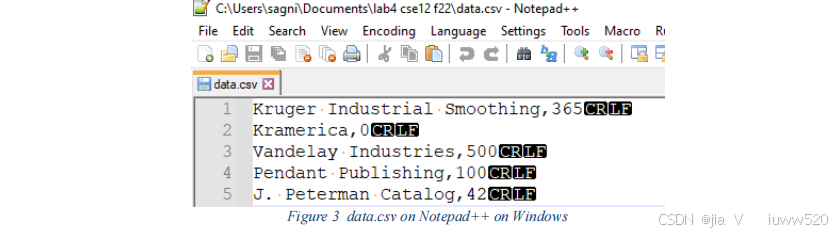
CSE12 Lab 4: Simple CSV File Analysis
This file shows the stock returns from an investment portfolio over a year. The “A” column contains the stock name and the “B” column indicates the returns in USD (You can assume that there are no
Fault Tree Analysis
FTA(故障树分析,Fault Tree Analysis)是一种系统化的方法,用于识别和分析系统故障的潜在原因。它通过构建故障树,将系统故障分解为其可能的根本原因,从而帮助工程师和管理人员理解和预防故障。以下是FTA的基本概念和步骤。 ### 1. FTA的基本概念 - **故障事件**:通常指系统中不希望发生的事件,如设备故障、失效等。 - **基本事件**:导致故障事件发生的根本原因,通

【PL理论】(31) 类型系统:静态分析 (Static Analysis) | 静态类型系统 | 什么是类型?
💭 写在前面:本章我们将进入类型系统的讲解,回顾一下之前我们整理的 F- 语言,然后介绍一下静态分析和静态类型系统。讨论程序员该如何处理一些 bug,有没有完美的静态分析器。 目录 0x00 回顾:F- 语言 0x01 静态分析(Static Analysis) 0x02 静态类型系统(Static Type System) 0x03 什么是类型? 0x00 回顾:F- 语言
词频统计(Word Frequency Analysis)详解
词频统计(Word Frequency Analysis)是语言学和文本分析中的一个重要工具,用于统计文本中各个词汇的出现频率。以下是关于词频统计(PTA)的详细解释,结合参考文章中的相关信息进行归纳和总结: 一、定义与目的 词频统计是对语篇或语料库中某一语词或短语出现的频数进行统计的过程或结果。其目的是通过量化词汇在文本中的出现次数,分析文本的主题、关键词、趋势等信息,为文本分析、数据挖掘、
为什么 google analysis 的 Custom Dimensions 设置后 Explorations 中不显示选项
可能有以下几种原因: 未完成配置或发布: 确保自定义维度已经完全设置,并且配置已经发布。未发布的设置不会生效。 数据处理延迟: 自定义维度设置后,数据处理可能需要一些时间。通常需要24到48小时才能在报告和探索中看到新的自定义维度。 范围问题: 确保自定义维度的范围(Scope)正确。GA4中的自定义维度可以有事件范围、用户范围等。范围设置错误可能导致在某些报告中不可见。 数据收集不完整