本文主要是介绍ROS naviagtion analysis: costmap_2d--Layer,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
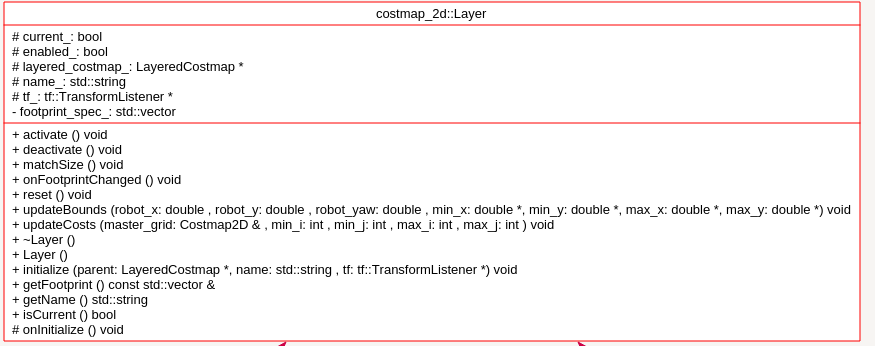
这个类中有一个LayeredCostmap* layered_costmap_数据成员,这个数据成员很重要,因为这个类就是通过这个指针获取到的对master map的操作。没有这个指针,所有基于Layer继承下去的地图的类,都无法操作master map。
这个类基本上没有什么实质性的操作,主要是提供了统一的接口,要求子类必须实现这些方法。这样plugin使用的时候,就可以不用管具体是什么类型的map,反正都有同样的方法名。
以下是这个类实现的两个方法,其他的方法基本上都是virtual ,要求子类实现。
void Layer::initialize(LayeredCostmap* parent, std::string name, tf::TransformListener *tf)
{layered_costmap_ = parent;name_ = name;tf_ = tf;onInitialize();
}const std::vector<geometry_msgs::Point>& Layer::getFootprint() <这篇关于ROS naviagtion analysis: costmap_2d--Layer的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


![[Linux Kernel Block Layer第一篇] block layer架构设计](https://i-blog.csdnimg.cn/direct/6f402f42143b4aac927657769404055e.png)