2d专题
Matter.js:Web开发者的2D物理引擎
Matter.js:Web开发者的2D物理引擎 前言 在现代网页开发中,交互性和动态效果是提升用户体验的关键因素。 Matter.js,一个专为网页设计的2D物理引擎,为开发者提供了一种简单而强大的方式,来实现复杂的物理交互效果。 无论是模拟重力、碰撞还是复杂的物体运动,Matter.js 都能轻松应对。 本文将带你深入了解 Matter.js ,并提供实际的代码示例,让你一窥其强大功能

Unity3D在2D游戏中获取触屏物体的方法
我们的需求是: 假如屏幕中一个棋盘,每个棋子是button构成的,我们希望手指或者鼠标在哪里,就显示那个位置的button信息。 网上有很多获取触屏物体信息的信息的方法如下面代码所示: Camera cam = Camera.main; // pre-defined...if (touch.phase == TouchPhase.Bagan)){ // 如果触控点状态为按下Ray

ModuleNotFoundError: No module named ‘diffusers.models.dual_transformer_2d‘解决方法
Python应用运行报错,部分错误信息如下: Traceback (most recent call last): File “\pipelines_ootd\unet_vton_2d_blocks.py”, line 29, in from diffusers.models.dual_transformer_2d import DualTransformer2DModel ModuleNotF
![[LeetCode] 240. Search a 2D Matrix II](/front/images/it_default.jpg)
[LeetCode] 240. Search a 2D Matrix II
题:https://leetcode.com/problems/search-a-2d-matrix-ii/description/ 题目 Write an efficient algorithm that searches for a value in an m x n matrix. This matrix has the following properties: Integers i

CSS-transform【上】(2D转换)【看这一篇就够了!!!】
目录 transform属性 transform的2D变换函数 transform的3D转换属性值 2D转换 translate位移 translate(x,y) x,y为px长度单位 x,y为%百分比 y值不写,默认为0 translateX(x)与translateY(y) translate与绝对定位结合实现元素水平垂直居中 scale(x,y) 百分比单位 sc

鸿蒙(API 12 Beta6版)图形【NativeImage开发指导 (C/C++)】方舟2D图形服务
场景介绍 NativeImage是提供Surface关联OpenGL外部纹理的模块,表示图形队列的消费者端。开发者可以通过NativeImage接口接收和使用Buffer,并将Buffer关联输出到OpenGL外部纹理。 针对NativeImage,常见的开发场景如下: 通过NativeImage提供的Native API接口创建NativeImage实例作为消费者端,获取与该实例对应的Na

2d激光点云识别退化场景(长走廊)
注:算法只适用于静态场景,在有动态场景(行人)的环境下不适用 退化场景描述 场景一:长走廊 激光探测距离有限,在长走廊环境下,激光在某些位置无法探测到走廊尽头,会出现如上图情况,激光轮廓为红色的两条平行线。对于这种情况,我们只需寻找到只有两个平行线,即位退化场景 场景二:单一墙面 通常情况下,退化场景为如上两种情况,当然多条平行线也是符合的。 算法思路为,如果激光雷达点云构成的特征都是平行线
鸿蒙(API 12 Beta6版)图形【NativeDisplaySoloist开发指导】方舟2D图形服务
如果开发者想在独立线程中进行帧率控制的Native侧业务,可以通过DisplaySoloist来实现,如游戏、自绘制UI框架对接等场景。 开发者可以选择多个DisplaySoloist实例共享一个线程,也可以选择每个DisplaySoloist实例独占一个线程。 接口说明 函数名称说明OH_DisplaySoloist* OH_DisplaySoloist_Create (bool useE

Unity(2022.3.41LTS) - 2D动画
目录 一、动画制作工具 二、动画类型 三.制作动画 1.创建动画剪辑 a.整理素材 b.创建剪辑方式一 c.创建剪辑方式二 d.动画预览 2.动画控制器 a.创建动画控制器 b.创建状态 c.运行动画 三. 动画控制器的调试 四、动画优化 五、与其他功能的集成 一、动画制作工具 Animation 窗口:这是制作 2D 动画的核心工具。在这个窗口中

Unity实战案例 2D小游戏HappyGlass(模拟水珠)
本案例素材和教程都来自Siki学院,十分感谢教程中的老师 本文仅作学习笔记分享交流,不作任何商业用途 预制体 在这个小案例中,水可以做成圆形但是带碰撞体,碰撞体比图形小一圈,顺便加上Trail renderer组件 材质 将碰撞材质的friction为0,bonciness可以按照需要修改 脚本 生成水珠的脚本并不难, 只是需要创建大量实例化对象的时候,加一个携程

CSS3 2D 转换
CSS3 的 2D 转换可以用来旋转、缩放、平移和倾斜元素,使网页布局更具动感和互动性。 一 transform: translate(x, y); transform: translate(x, y); 是 CSS3 中用于平移元素的属性。它将元素在水平(x轴)和垂直(y轴)方向上移动一定的距离。x 和 y 值可以是像素 (px)、百分比 (%)、视口单位 (vw, vh) 或其他 CSS

2d像素游戏基本架构
目录 2D像素游戏 基本架构 性能比较 地图和场景 创建和管理地图资源: 使用TileMap工具: 构建复杂场景: 添加碰撞体和物理效果: 优化和调整: 骨骼绑定 关键帧动画 资源管理工具 2D像素游戏 基本架构 游戏引擎选择: Unity和虚幻引擎(Unreal Engine)是目前最流行的2D游戏开发引擎。Unity以其跨平台性和易用性著称,而虚幻引擎则

WPF特效-绘制实时2D激光雷达图
接前两篇: https://blog.csdn.net/u013224722/article/details/80738619 https://blog.csdn.net/u013224722/article/details/80738995 除了c# GDI 、Opencv(c++)、 c# Emgu绘图外,其实c# WPF绘图功能也很强大。上文中之所以最终使用了Emgu绘图 ,只是因为


单图生成 2D 和 3D 人物,高质量图像处理模型 CharacterGen来啦!
CharacterGen引入了一个简化的生成流程和一个图像条件的多视图扩散模型。该模型有效地将输入姿态校准到规范形式,同时保留输入图像的关键属性,从而解决了多样化姿态带来的挑战。 CharacterGen的另一个核心组成部分是基于Transformer的、可泛化的稀疏视图重建模型,它有助于从多视图图像创建详细的3D模型。还采用了纹理反投影策略来生成高质量的纹理贴图。此外,建立了一个动漫角色数据集

基于HT for Web矢量实现2D叶轮旋转
之前在拓扑上的应用都是些静态的图元,今天我们将在拓扑上设计一个会动的图元——叶轮旋转。 我们先来看下这个叶轮模型长什么样 从模型上看,这个叶轮模型有三个叶片,每一个叶片都是不规则图形,显然无法用上我们HT for Web的基础图形来拼接,那么我们该怎么做呢?很简单,在HT for Web中提供了自定义图形的方案,我们可以通过自定义图形来绘制像叶片这种不规则图形。 在绘制叶片之前,我们得先来

HTML5的WebGL实现的3D和2D拓扑树
在HT for Web中2D和3D应用都支持树状结构数据的展示,展现效果各异,2D上的树状结构在展现层级关系明显,但是如果数据量大的话,看起来就没那么直观,找到指定的节点比较困难,而3D上的树状结构在展现上配合HT for Web的弹力布局组件会显得比较直观,一眼望去可以把整个树状结构数据看个大概,但是在弹力布局的作用下,其层次结构看得就不是那么清晰了。所以这时候结构清晰的3D树的需求就来了,那

基于HTML5 Canvas 点击添加 2D 3D 机柜模型
今天又返回好好地消化了一下我们的数据容器 DataModel,这里给新手做一个典型的数据模型事件处理的例子作为参考。这个例子看起来很简单,实际上结合了数据模型中非常重要的三个事件处理的部分:属性变化事件监听、选中变化事件监听以及数据模型变化事件监听。 为了让这个例子具现化,我将这个简单的例子做了一点改动,下面我会一一解释。 例子地址:http://hightopo.com/guide/g

基于 HTML5 Canvas 2D 拓扑图和 3D 机柜模型的增删操作
今天好好地消化了一下我们的数据容器 DataModel,这里给初学者做一个典型的数据模型事件处理的例子作为参考。这个例子看起来很简单,实际上结合了数据模型中非常重要的三个事件处理的部分:属性变化事件监听、选中变化事件监听以及数据模型变化事件监听。 为了让这个例子具现化,我将这个简单的例子做了一点改动,下面我会一一解释。 例子地址:http://hightopo.com/guide/guide/
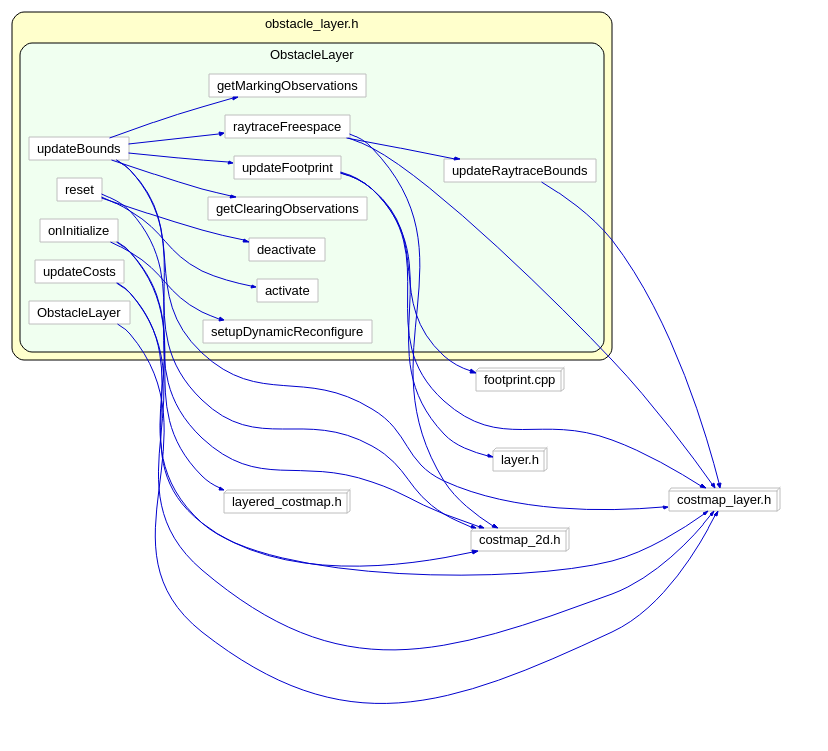
ROS naviagtion analysis: costmap_2d--ObstacleLayer
构造函数 ObstacleLayer(){costmap_ = NULL; // this is the unsigned char* member of parent class Costmap2D.这里指明了costmap_指针保存了Obstacle这一层的地图数据} 对于ObstacleLater,首先分析其需要实现的Layer层的方法: virtual void o
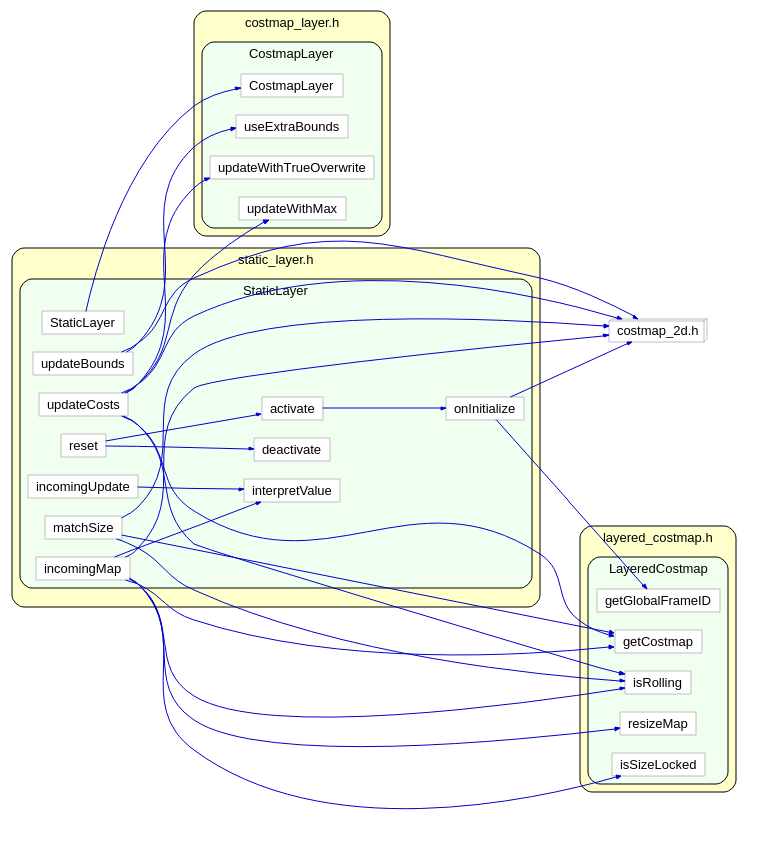
ROS naviagtion analysis: costmap_2d--StaticLayer
从UML中能够看到,StaticLayer主要是在实现Layer层要求实现的接口。 virtual void onInitialize();virtual void activate();virtual void deactivate();virtual void reset();virtual void updateBounds(double robot_x, double rob
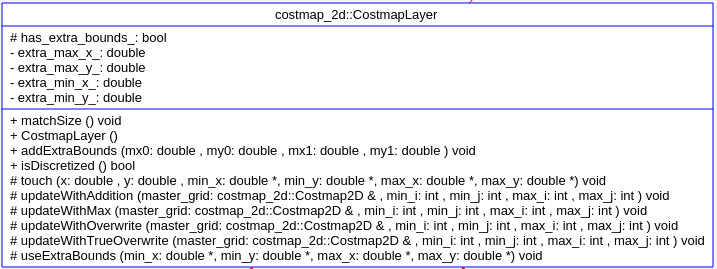
ROS naviagtion analysis: costmap_2d--CostmapLayer
这个类是为ObstacleLayer StaticLayer voxelLayer 这种维护了自己所在层的地图数据的类,提供了一些公共的操作方法。 从UML中可以看到,这个类提供了以下方法,这些方法的参数列表均为(costmap_2d::Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j) updateWit
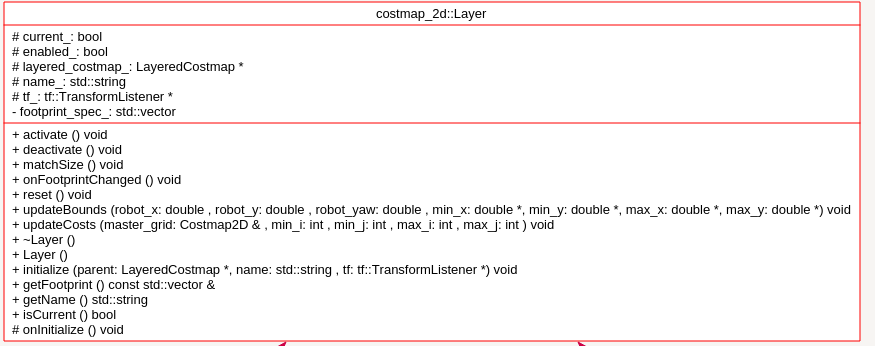
ROS naviagtion analysis: costmap_2d--Layer
这个类中有一个LayeredCostmap* layered_costmap_数据成员,这个数据成员很重要,因为这个类就是通过这个指针获取到的对master map的操作。没有这个指针,所有基于Layer继承下去的地图的类,都无法操作master map。 这个类基本上没有什么实质性的操作,主要是提供了统一的接口,要求子类必须实现这些方法。这样plugin使用的时候,就可以不用管具体是什么类
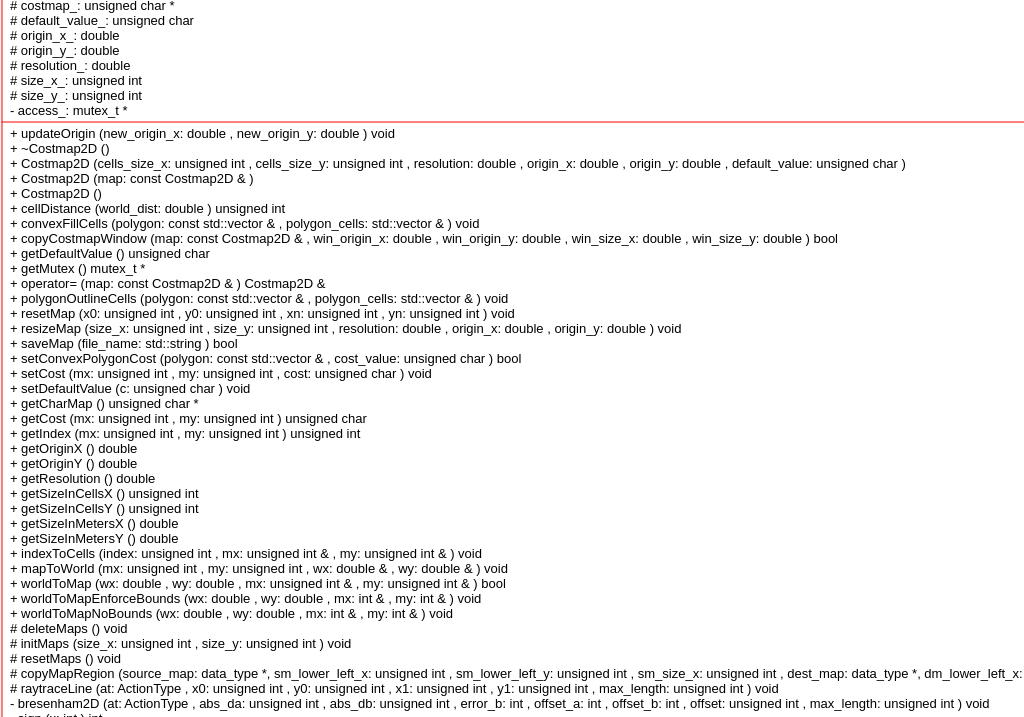
ROS naviagtion analysis: costmap_2d--Costmap2D
Costmap2D是存储地图数据的父类。真正的地图数据就存储在数据成员unsigned char *costmap_ 。 首先,分析类的构造函数: 默认构造函数:Costmap2D::Costmap2D() : // just initialize everything to NULL by defaultCostmap2D::Costmap2D() :size_x_(0), si

【CVPR‘24】DeCoTR:使用 2D 和 3D 注意力增强深度补全
DeCoTR: Enhancing Depth Completion with 2D and 3D Attentions DeCoTR: Enhancing Depth Completion with 2D and 3D Attentions 中文解析摘要介绍方法方法3.1 问题设置3.2 使用高效的 2D 注意力增强基线3.3 3D中的特征交叉注意力点云归一化位置嵌入 3.4 捕捉 3D