本文主要是介绍从turtlebot领会到ROS包安装方式的不同,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
安装ROS包有两种方式,一种是安装Debian包,一种是源文件安装。
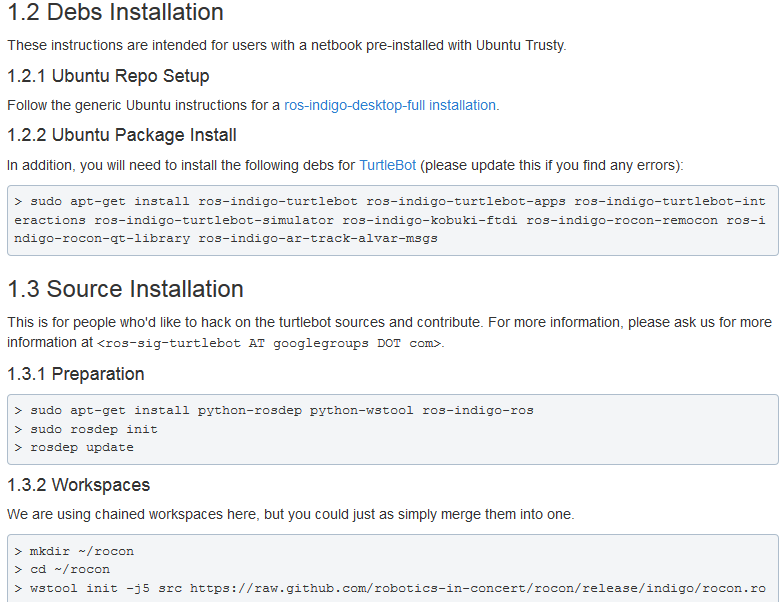
1.Debian包的安装方式采用的命令是:
$ sudo apt-get install ros-indigo-*用这种安装包的方式,安装后的文件在/opt/ros/indigo/share下,文件是不能随意修改的。当需要修改相关包的文件时,需要cd到相应的包下,然后采用sudo管理员权限修改。
2.源码安装:
源码一般是从SVN,Git,Mecurial这三种控制系统中下载。具体下载方式参见ros by example,这里只是想说明这两种安装方式的区别。从源码安装包后,可以在工作空间如catkin_ws下的src中找到相应的包,当需要修改参数和节点时,只需要在这些包下面找到相应的文件进行修改即可。
PS:写这篇博客原因在于,本人是个ROS初学者,学习官网安装turtlebot包时没有看明白,就把下面两种方法都安装了一遍,当时用源码安装后,部分编译失败,但是运行包时没有出问题,就没有深究。直到需要修改turtlebot里面的节点时才发现了问题,不得已重装ROS才领会到。
这篇关于从turtlebot领会到ROS包安装方式的不同的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








