turtlebot专题

cartographer+turtlebot+hokuyo|安装配置
cartographer+turtlebot+hokuyo|安装配置 系统:ubuntu 14.04+ros indigo 或 ubuntu 16.04+ros kinetic 平台:turtlebot2 传感器:hokuyo UTM-30LX laser 本文假设已经成功安装ubuntu,ros,以及各种与turtlebot相关的ros package等。本文主要介绍,怎么安装配car
结合hokuyo的UST-10LX激光雷达在turtlebot上建图
本人手上所用的激光雷达是hokuyo的UST-10LX型号,接口是网口类,要将其放在turtlebot上进行SLAM建图,修改的文件和USB接口的雷达一样,但是内容上有细微差异。我也是找了好些博客综合而来,有错误的地方还请大神们多多指教。 首先,得先弄明白几点情况: 1.在ROS上安装包有两种方式,一种是通过apt-get insatll安装Debian文件,一种是源文件安装。我学习ROS不深
从turtlebot领会到ROS包安装方式的不同
安装ROS包有两种方式,一种是安装Debian包,一种是源文件安装。 1.Debian包的安装方式采用的命令是: $ sudo apt-get install ros-indigo-* 用这种安装包的方式,安装后的文件在/opt/ros/indigo/share下,文件是不能随意修改的。当需要修改相关包的文件时,需要cd到相应的包下,然后采用sudo管理员权限修改。 2.源码安装: 源码

turtlebot 测试 Gazebo Harmonic ROS Jazzy
源码移植后理论上支持所有Gazebo和ROS版本,但花费时间较多。 只推荐学习Gazebo 经典版和Gazebo Harmonic以及之后版本。 在中间的过渡版本,不推荐学习。 Gazebo经典版包括Gazebo 7 Gazebo 9 Gazebo 11。 Gazebo Harmonic 和 ROS2 jazzy 安装和测试-CSDN博客 Gazebo与ROS1、ROS2接口变迁-2
ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航
ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航 ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航 说明 介绍如何使用turtlebot通过rtabmap_ros进行建图和导航 安装相关包: Kinetic $ sudo apt-get install ros-kinetic-turtlebot-bringup r
Turtlebot入门-测试Kinect
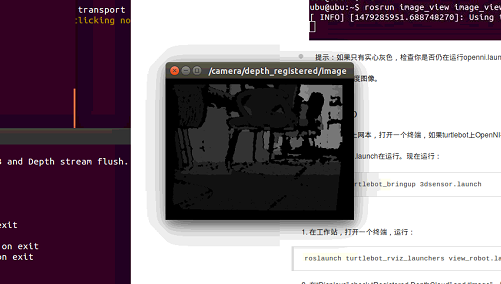
Turtlebot入门-测试Kinect 测试Kinect或asus_xtion_pro 注意: kinect,请安装freenect替代openni 安装openni和freenect驱动 安装驱动 $ sudo apt-get install ros-indigo-openni-* ros-indigo-openni2-* ros-indigo-freenect-*$ rospack p

从头搭建TurtleBot的工作环境
换了一台新的笔记本,所有系统、软件都要重新装,在此记录一下整个过程。 笔记本为联想拯救者14寸本,自带win10系统。 一.装ubuntu双系统,这里有一个超级简便的方法,可以直接把ubuntu14.04、ROS、以及TurtleBot的相关包都装上。 制作系统启动盘:在http://wiki.ros.org/turtlebot/Tutorials/indigo/Turtlebot%20In

turtlebot的mobile_base节点
前提:indigo版本,kobuki设备 在turtlebot的mininal.launcher中最终要的节点为mobile_base。 mobile_base为整个设备的基础节点,类似于kobuki的设备控制台。通过详细了解sub/pub topics和params,可以对mobile节点的作用和kobuki robot有哪些子设备和每个子设备的功能有初步了解。 实际主题前的~为"/mob
turtlebot 中的minimal.launch介绍
前导:ROS版本为indigo,turtlebot设备为kobuki 每次在kobuki运行一些例子前,都要执行roslaunch turtlebot_bringup minimal.launch这个命令,然后听见kobuki发出一串升序的声音,说明kobuki初始化成功。从现在开始慢慢深入了解kobuki。 先从了解 minimal.launch开始:通过roscd turtlebot_br
增加Hokuyo Laser到你的turtlebot注意事项
可以参考:http://wiki.ros.org/turtlebot/Tutorials/hydro/Adding%20a%20Hokuyo%20laser%20to%20your%20Turtlebot 但文中有几处出错的地方 1.加载驱动时,赋予777权限,但举例中是666权限 2.文章挂在ros的hydro版本下面,举例确实indigo版本 3.~/.bashrc中的修改举例的路径
ROS进阶学习笔记(11)- Turtlebot Navigation and SLAM - ROSMapModify - ROS地图修改
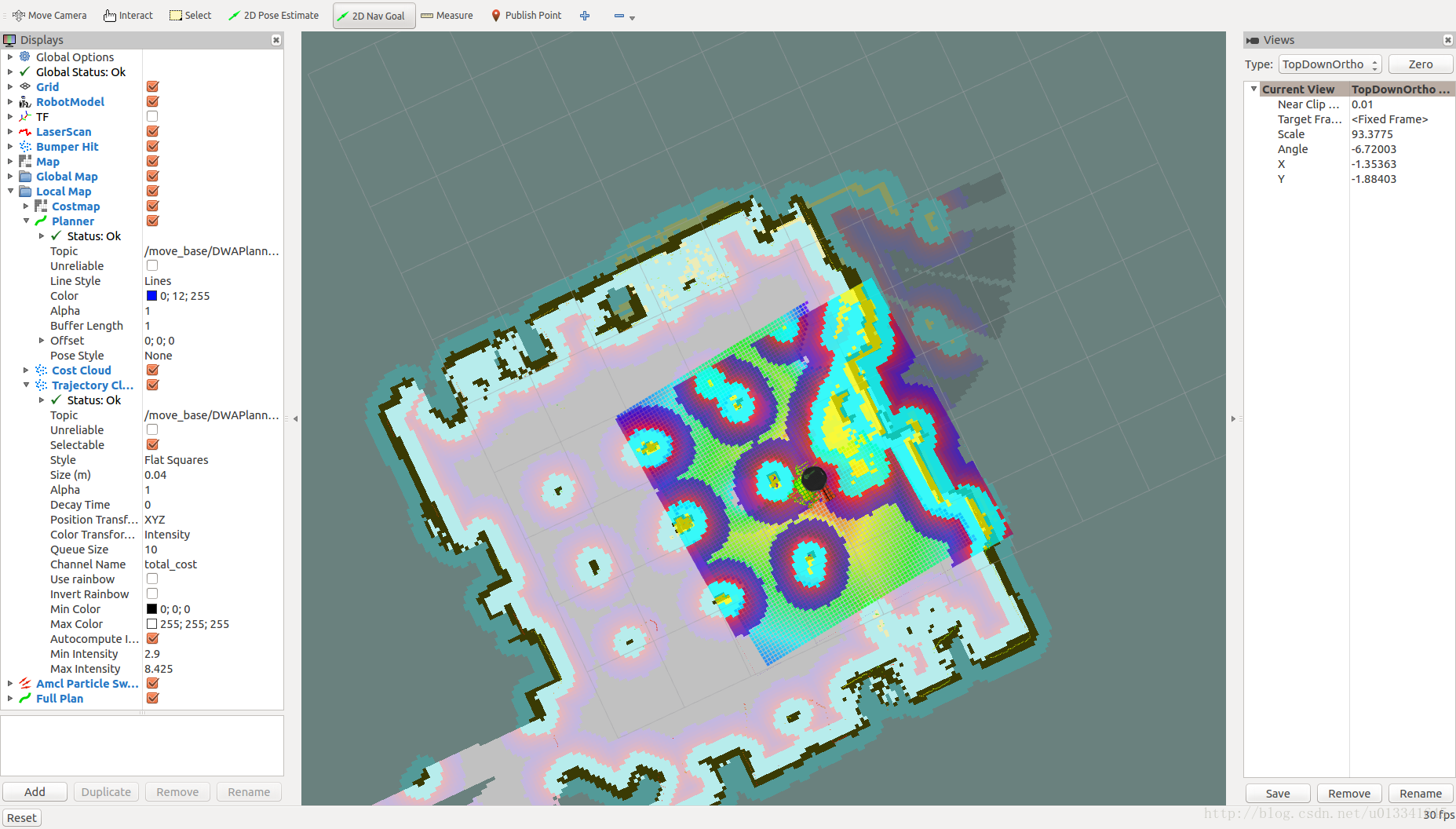
ROS进阶学习笔记(11)- Turtlebot Navigation and SLAM - 2 - MapModify地图修改 We can use gmapping model to generate the map file: **.pgm and **.amcl, the latter is just a refer to the **.pgm map file. Here I int
ROS进阶学习笔记(11)- Turtlebot Navigation and SLAM
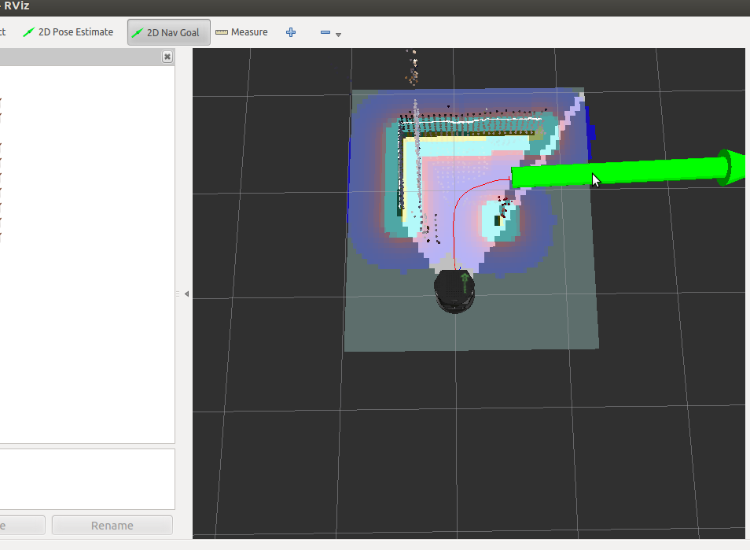
(写在前面: 这里参考rbx书中第八章和ROS社区教程进行学习,先看社区教程) === Doing the Turtlebot Navigation === ref ros wiki: http://wiki.ros.org/turtlebot_navigation/Tutorials 1. Create the Data under remote control R
ROS进阶学习笔记(10)- 搭建自己的Turtlebot(5) - Interactive Makers
用interactive_makers控制Turtlebot移动 interactive_makers 是Willow Garage公司开发的一个虚拟控制工具,可通过鼠标在虚拟环境中的操作,完成实际机器人运动的拖动运动控制。 参考: ref1: http://wiki.ros.org/turtlebot_interactive_markers/Tutorials/
Turtlebot3调试必看——爬坑笔记(内含ROS和Turtlebot参考教程)
设备及系统版本: PC端: Lenovo Y7000P + Ubuntu18.04 + ROS Melodic。如果使用电脑也为此型号,系统建议安装Ubuntu18.04,因为安装16.04后会缺少独显、触摸版、无线网卡等驱动,后续安装也很麻烦。其他型号电脑可根据电脑情况自选,只是在按照官方说明书调试时要注意切换ROS版本(Ubuntu18.04对应ROS Melodic;Ubuntu16.0

机器人入门(五)—— 仿真环境中操作TurtleBot
仿真环境中操作TurtleBot 一、实操1.1 查看姿态信息1.2 控制turtlebot移动的三种方式1.2.1 命令行发布指令1.2.2 键盘操控1.2.3 Python脚本控制1.2.4 使用rqt工具界面,发布运动指令 二、里程计(odometry)TurtleBot3 仿真 进行实操之前,先准备环境 $ sudo apt install ros-kinetic-tu
机器人入门(五)—— 仿真环境中操作TurtleBot
仿真环境中操作TurtleBot 一、实操1.1 查看姿态信息1.2 控制turtlebot移动的三种方式1.2.1 命令行发布指令1.2.2 键盘操控1.2.3 Python脚本控制1.2.4 使用rqt工具界面,发布运动指令 二、里程计(odometry)TurtleBot3 仿真 进行实操之前,先准备环境 $ sudo apt install ros-kinetic-tu

Ros中2D_Slam说明: turtlebot+kinect改写成turtlebot+laser(hokuyo)
转自:http://blog.csdn.net/zyh821351004/article/details/44103757 SLAM_turtlebot hokuyo 说明: 安装包:turtlebot turtlebot_apps hokuyo_node kobuki kinect 2D_Slam 参考链接: http://wik

turtlebot深度相机_ROS机器人开源套件Turtlebot3定制版(Turbot3-DL)新品
双氙商品详情 相关推荐 商品标签云 买过的人评价 ROS机器人开源套件Turtlebot3定制版(Turbot3-DL)注意: 非现货,需要2天完成组装和测试。采购请先与客服沟通。基于Turtlebot3定制版,做如下改进:- 采用Burger的电机,能支持15KG,对于迷你机型负载已经足够- 采用waffle的尺寸,更方便扩展- 采用单个塑胶滚轮,移动更顺畅方便- 采用TX2开发板,性能更
![ROS仿真软件Turtlebot-Gazebo的安装使用以及错误处理[机器人避障]](https://img-blog.csdnimg.cn/3056eb60d18f439286f287936dcd6ae1.png)
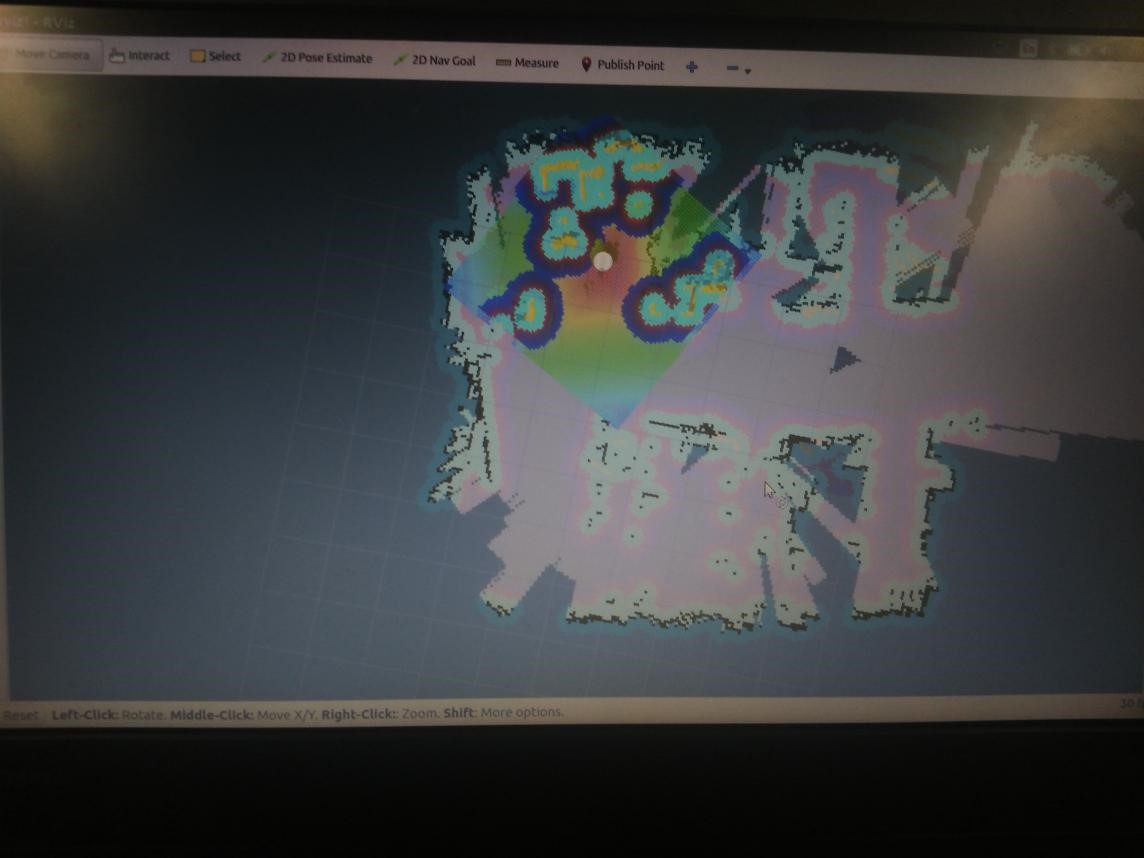
ROS仿真软件Turtlebot-Gazebo的安装使用以及错误处理[机器人避障]
很多时候由于机器人价格比较贵,而且会因为环境因素、操作失误或者摔坏等,所以我们可以先在仿真软件上做测试,也可以避免这些问题,虽然没有那么真实感,可毕竟是免费的嘛。我们可以在这些仿真的机器人身上去学习如何控制机器人,读取它们的传感器数据,解析这些传感器数据并做出决策,通过前面我们学到的话题、服务、动作来驱动机器人。 1、操作仿真机器人 1.1、安装仿真软件 这里主要介绍turt
ROS仿真软件Turtlebot-Gazebo的安装使用以及错误处理[机器人避障]
很多时候由于机器人价格比较贵,而且会因为环境因素、操作失误或者摔坏等,所以我们可以先在仿真软件上做测试,也可以避免这些问题,虽然没有那么真实感,可毕竟是免费的嘛。我们可以在这些仿真的机器人身上去学习如何控制机器人,读取它们的传感器数据,解析这些传感器数据并做出决策,通过前面我们学到的话题、服务、动作来驱动机器人。 1、操作仿真机器人 1.1、安装仿真软件 这里主要介绍turt
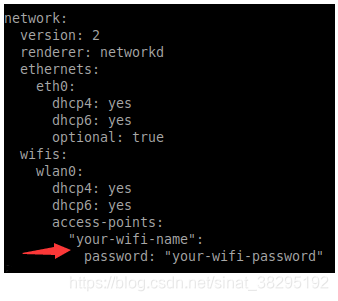
turtlebot操作
之前介绍过turtlebot的安装,turtlebot的包提供了机器人的很多功能,给开发者提供了很多可以借鉴的东西。本篇文章讲的东西比较简单,就是些命令,毫无技术可言,所以大神请跳过,小白对着做,成功了也不要有成就感。上篇文章已经讲过了网络的配置,本篇需要用到网络的相关内容。 首先按照上篇教程配置好网络环境 键盘控制turtlebot Master: roslaunch turtlebot_br