本文主要是介绍turtlebot操作,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
之前介绍过turtlebot的安装,turtlebot的包提供了机器人的很多功能,给开发者提供了很多可以借鉴的东西。本篇文章讲的东西比较简单,就是些命令,毫无技术可言,所以大神请跳过,小白对着做,成功了也不要有成就感。上篇文章已经讲过了网络的配置,本篇需要用到网络的相关内容。
首先按照上篇教程配置好网络环境
- 键盘控制turtlebot
Master:
roslaunch turtlebot_bringup minimal.launch 连接底盘
host:
roslaunch turtlebot_teleop keyboard_teleop.launch
连接底盘之前要赋权限。若无报错,根据提示控制底盘移动。
- 游戏操纵杆控制
Master:
roslaunch turtlebot_bringup minimal.launch 连接底盘
host:
roslaunch turtlebot_teleop ps3_teleop.launch
- 建图
Master:
roslaunch turtlebot_bringup minimal.launch 连接底盘
host
roslaunch turtlebot_navigation gmapping_demo.launch 打开建图节点
roslaunch turtlebot_rviz_launchers view_navigation.launch 打开rviz查看实时建图过程
roslaunch turtlebot_teleop keyboard_teleop.launch 打开键盘控制节点,控制机器人将环境扫一遍
rosrun map_server map_saver -f /tmp/my_map 运行保存地图节点,将地图保存到/tmp下
- 导航
Master:
roslaunch turtlebot_bringup minimal.launch 连接底盘
host:
roslaunch turtlebot_navigation amcl_demo.launch map_file:=/tmp/my_map.yaml 打开地图和相关硬件驱动
roslaunch turtlebot_rviz_launchers view_navigation.launch –screen
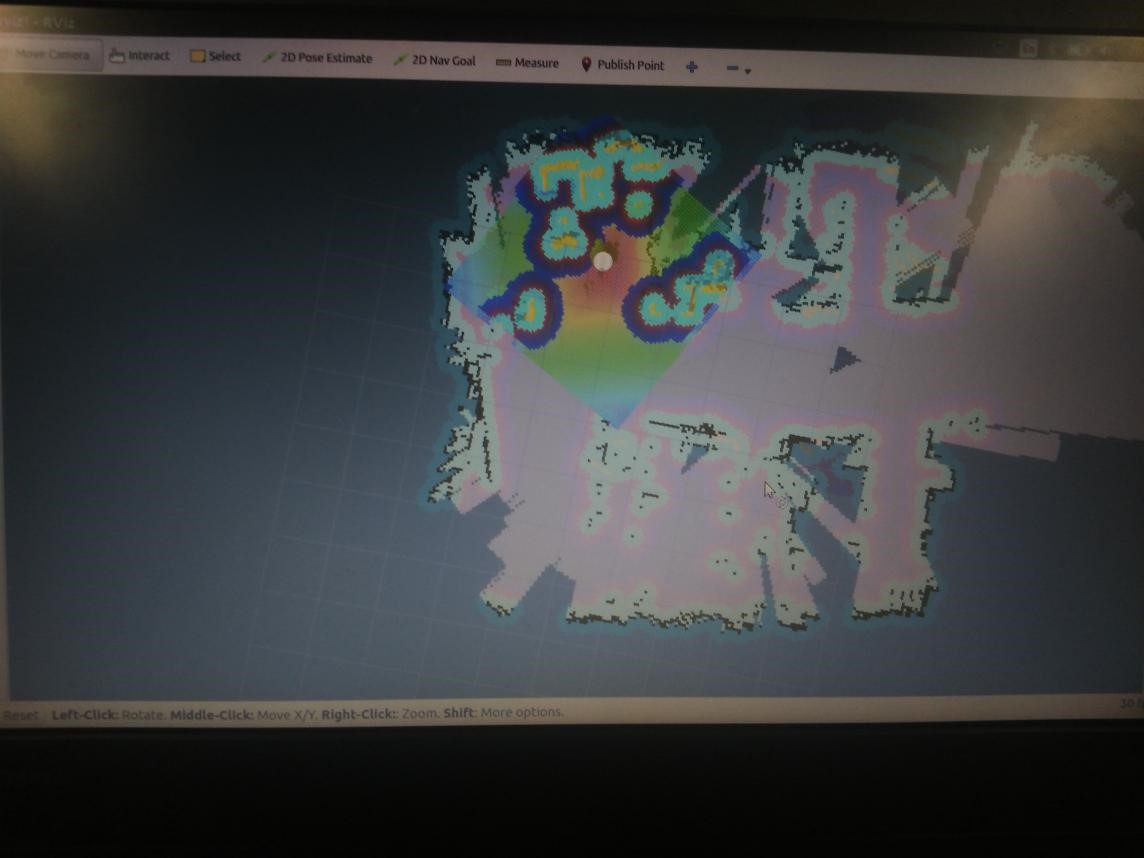
这时候可以在rviz界面看到地图和小车,先点击rviz界面上方的2D Pose Estimate按钮 告诉小车当前的位置和方向,尽量保证激光测距仪当前扫描出来的轮廓和地图一直 ,否则小车将原地打转两圈寻找契合点,找不到就失败了 。
然后点击2D Nav Goal按钮告诉小车要去的位置和方向 小车会自动规划路径 ,并运动到目标位置
通过键盘和操纵杆的命令你也许会发现,两个命令差不多,并且有一定的规律,下面详细解释一下命令,以键盘控制为例
roslaunch turtlebot_teleop keyboard_teleop.launch
roslaunch是告诉系统用roslaunch程序启动接下来的文件
turtlebot_teleop 是ros功能包,本命令意思是控制turtlebot运动的功能包,在turtlebot/src文件夹下是可以找到相应的文件夹的
keyboard_teleop.launch是launch文件,在turtlebot_teleop包下的launch文件夹下有很多launch文件,大多数文件看名字就能推测出功能。
Ros入门的知识到这里结束,建议去创客智造和wiki上看一下ros的基本概念,包括
- 工作空间,包的基本概念
- 话题,节点,消息格式
因为当时我学习的时候没有做笔记,所以博客不做移植。
之后的介绍会上升到代码层,但是仅限我做过的东西。
这篇关于turtlebot操作的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




