orb专题

SLAM ORB-SLAM2(29)PnP估计姿态
SLAM ORB-SLAM2(29)PnP估计姿态 1. PnP问题2. EPnP算法2.1. 计算4对控制点的世界坐标2.2. 计算齐次质心坐标2.3. 计算4对控制点的相机坐标2.3.1. 构造M矩阵2.3.2. 计算 M T M M^TM MTM的0特征值对应的特征向量2.3.3. 计算零空间的秩2.3.4. 计算线性组合的系数 2.4. 选择最小重投影误差 3. 标题

Fast ORB-SLAM
点云PCL免费知识星球,点云论文速读。 文章:FastORB-SLAM: Fast ORB-SLAM method with Coarse-to-Fine Descriptor Independent Keypoint Matching 作者:Qiang Fu12, Hongshan Yu1 , Xiaolong Wang 翻译:particle 本文仅做学术分享,如有侵权,请联系删除。欢迎各位

orb_slam2 install遇到问题
3.1../build.sh出错 error: make[2]: * No rule to make target /home/szm/Pangolin/build/src/libpangolin.so', needed by../lib/libORB_SLAM2.so’. Stop. 解决: git clone https://github.com/stevenlovegrove/Pan
A tutorial on binary descriptors – part 3 – The ORB descriptor
转载地址:https://gilscvblog.com/2013/10/04/a-tutorial-on-binary-descriptors-part-3-the-orb-descriptor/ Gil's CV blog A tutorial on binary descriptors – part 3 – The ORB descriptor This third pos
ORB_SLAM2安装以及使用说明
首先要安装ORB_SLAM2 https://github.com/raulmur/ORB_SLAM2 一开始在服务器上装 没有sudo权限 各种装不好。。。很烦 比如eigen glew各种装不好 find_package找不到 折腾了很久 于是选择在本地跑。。。 之前遇到一些坑 在本地跑的时候 遇到需要装的依赖 装起来就比较快了 然后就运行起来了 运行的时候数据的路径也要准确 比
【ORB_SLAM系列4】—— 一文搞定如何在Ubuntu20.04中安装运行ORB_SLAM3(包含ROS版本和非ROS版本)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、ORB_SLAM源码下载1.源码下载 二、安装支持C++特性依赖三、安装Pangolin1. 安装Pangolin的依赖2. 下载编译 四、安装Opencv五、安装Eigen3六、DBoW2 and g2o七、安装boost库八、非ROS部分的源码编译和安装1. 编译之前先修改代码2. 编译源码 九、
动态SLAM:ORB-SLAM2+YOLOv8
动态SLAM:基于ORB-SLAM2与YOLOv8剔除动态特征点(三种方法)_orbslam+yolo-CSDN博客 动态SLAM:ORB-SLAM2+YOLOv8-seg

翻译 | ORB: An efficient alternative to SIFT or SURF(ORB:对SIFT或SURF的一种有效选择)
博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 ORB:对SIFT或SURF的一种有效选择 ORB: an efficient alternative to SIFT or SURF 译者:Michael Beechan(陈兵) 重庆理工大学 Ethan Rublee Vi
VMware虚拟机中ubuntu使用记录(10)—— 如何在Ubuntu18.04中使用自己的单目摄像头运行ORB_SLAM3(亲测有效,踩坑记录)
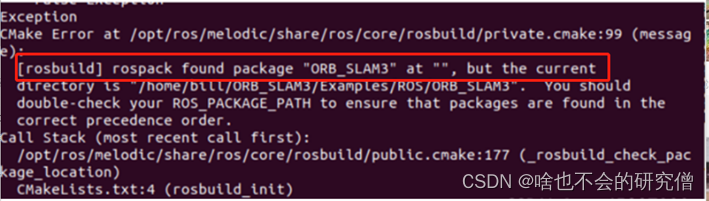
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、ORB_SLAM3源码编译二、ORB_SLAM3实时单目相机测试1. 查看摄像头的话题2. 运行测试 三. 运行测试可能的报错1. 报错一(1) 问题描述(2) 原因分析(3) 解决 2. 报错二(1) 问题描述(2) 解决 前言 本次教程运行ORB_SLAM3,所需的环境如下:
ORB_SLAM软件包的安装及简单测试
写在前面 本博客是根据参考网站翻译而来的,但原网站有些地方似乎存在少量瑕疵,本人针对具体的实施环境对于某些步骤略有修改。此外,鉴于个人英语水平有限,翻译有不足的地方望各位指正。 安装环境 操作系统:Ubuntu 14.04 LTS ROS版本:ROS Indigo Igloo(the full Desktop version) 先决条件 Boost 需要使用 Boost 库启动

Windows下搭建ORB_SLAM2
(一)Orbslam2的安装: 大佬已经改好的windows版,方便实用,安装步骤非常清晰,按着一步步来就可以啦 https://github.com/phdsky/ORBSLAM24Windows 但是! 唯一需要注意的一点就是在安装Pangolin时,CMakeList里人家写了自动从github上下载并安装glew,libpng,libjpg三个库。 所以我们需要自己在win
ORB-SLAM2运行自己的数据集
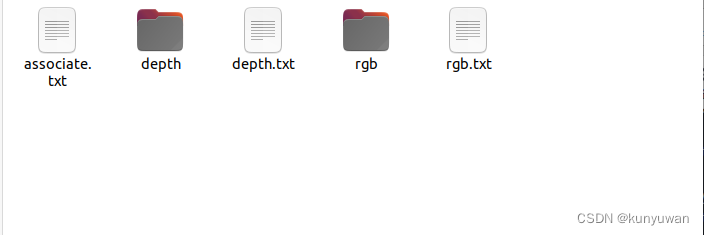
ORB-SLAM2运行自己的数据集 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ 一、生成数据集 1.生成图片 搭建好ORB-SLAM后,可以跑自己的数据进行实验了。首先进行数据准备。我这里是通过摄像头采集到的视频。先要将视频处理成一帧一帧的图片,如果采集来的
ORB-SLAM2搭建详细过程
ORB-SLAM2搭建详细过程 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ ORB-SLAM是15年一个西班牙博士做的[1],工程效果来看,是目前最好的了。ORB-SLAM是针对单目做的slam,最新的是ORB-SLAM2,支持单目、双目和RGB-D接口。这里对
ORB-SLAM2详解(六)闭环检测
ORB-SLAM2详解(六)闭环检测 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ 毋庸置疑的是,随着相机的运动,我们计算的相机位姿,三角化得到的点云位置,都是有误差的,即使我们使用局部的或全局的BA去优化,仍然会存在累积误差。而消除误差最有效的办法是发现闭环,并根
ORB-SLAM2详解(五)局部建图
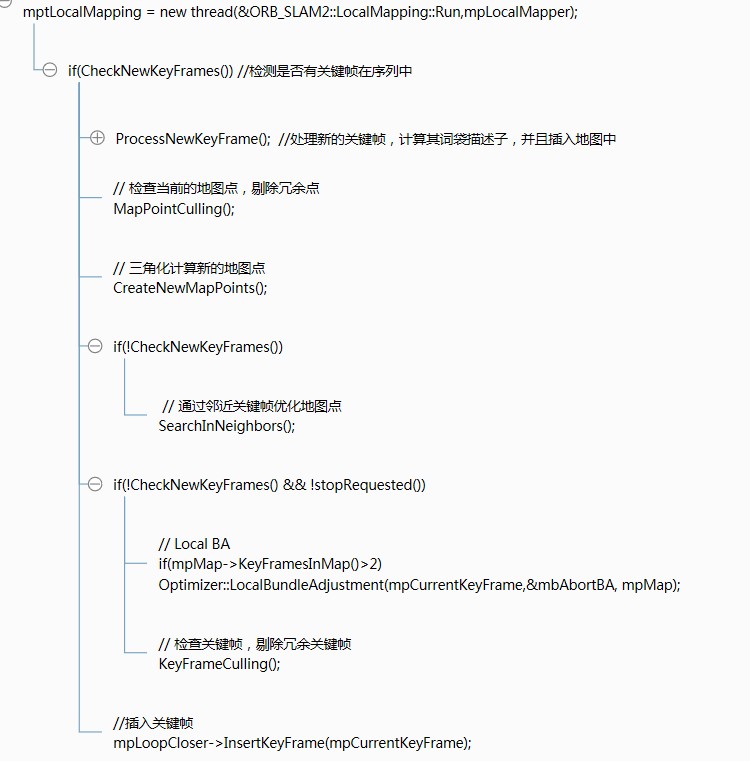
ORB-SLAM2详解(五)局部建图 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ 在之前的Tracking中,我们得到了新的关键帧Ki。如下图所示,Local Mapping这部分 包括插入关键帧,剔除冗余的地图点和关键帧,还有进行局部集束调整。接下来按照顺序介绍
ORB-SLAM2详解(四)跟踪
ORB-SLAM2详解(四)跟踪 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ 这一部分是ORB_SLAM系统中最基本的一步,会对每一帧图像进行跟踪计算。Tracking线程运行在主线程中,主要思路是在当前帧和(局部)地图之间寻找尽可能多的对应关系,来优化当前帧的位
ORB-SLAM3如何加入GPS和Wheel轮速约束
0. 简介 对于ORB-SLAM3而言。如何将代码融入Wheel和GPS是一个挺有意思的事情。通过GPS和Wheel可以非常有效的约束视觉里程计结果。Wheel这块主要就是将速度等信息融合到前端中,类似IMU和视觉帧间的关系。而GPS由于频率不是很高,所以基本是用于全局修正的作用。这部分我们经常使用松耦合的形式,当然也有工作去做了紧耦合相关的工作。 1. Wheel特征添加 这一部分主要的其
ROS下运行ORB-SLAM实例教程
实验环境ubuntu 14.04+ros indigo Step1: 配置环境变量 $ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/src 在’src’目录中可能没有任何软件包,只有一个CMakeLists.txt,返回到catkin_ws中依然可以编译它: $ cd ~/catkin_ws/ $ catkin_make gedit ~/.bashr
![[总结] orb(Oriented Fast and rotated Brief) 1.详解](https://img-blog.csdnimg.cn/60335f8b369b4856a73aaeaab95d7cb7.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA54aK54aK55qE5bCP5b-D5b-D,size_20,color_FFFFFF,t_70,g_se,x_16)
[总结] orb(Oriented FAST and Rotated BRIEF) 2.代码
参考: ORB 特征提取算法(实践篇一) - Alex777 - 博客园 参考:【OpenCV学习笔记】之图像金字塔(Image Pyramid)_zhu_hongji的博客-CSDN博客_图像金字塔 1. 引言 1.1 图像金字塔(Image Pyramid) 尺度调整,可以用 resize


计算机视觉 | 基于 ORB 特征检测器和描述符的全景图像拼接算法
Hi,大家好,我是半亩花海。本项目实现了基于 ORB 特征检测器和描述符的全景图像拼接算法,能够将两张部分重叠的图像拼接成一张无缝连接的全景图像。 文章目录 一、随机抽样一致算法二、功能实现三、代码解析四、效果展示五、完整代码 一、随机抽样一致算法 我们可以通过求取上一张中的特征点匹配的方法,将多个图片拼接在一起。简单来说就是将这张图片做一个变换到另外一个图片上面去,中间
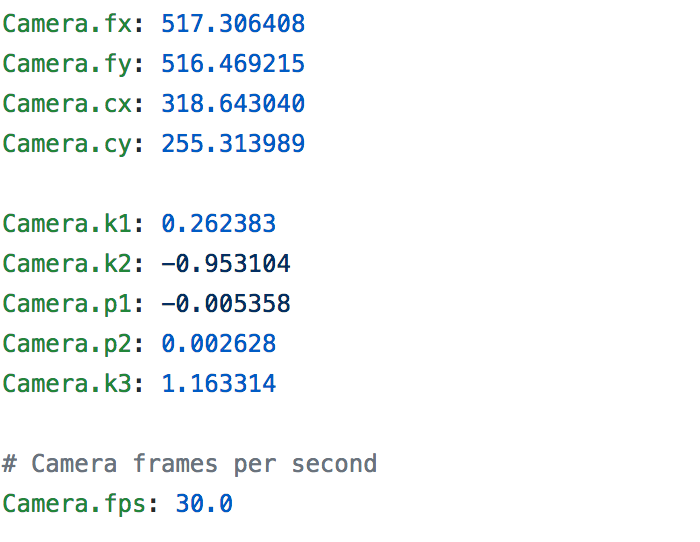
Ubuntu20.04配置Kinect 2.0驱动安装和ROS环境下配置以及录制bag包和制作ORB-SLAM数据集
1. 安装libfreenect2 1.1 下载官方文件 git clone https://github.com/OpenKinect/libfreenect2.gitcd libfreenect2 1.2 安装build工具 sudo apt-get install build-essential cmake pkg-config 1.3 安装libusb sudo apt-

OpenCV图像处理——基于OpenCV的ORB算法实现目标追踪
概述 ORB(Oriented FAST and Rotated BRIEF)算法是高效的关键点检测和描述方法。它结合了FAST(Features from Accelerated Segment Test)算法的快速关键点检测能力和BRIEF(Binary Robust Independent Elementary Features)算法的征描述能力,使得ORB在处理图像时既快速又准确。 关