本文主要是介绍计算机视觉 | 基于 ORB 特征检测器和描述符的全景图像拼接算法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Hi,大家好,我是半亩花海。本项目实现了基于 ORB 特征检测器和描述符的全景图像拼接算法,能够将两张部分重叠的图像拼接成一张无缝连接的全景图像。
文章目录
- 一、随机抽样一致算法
- 二、功能实现
- 三、代码解析
- 四、效果展示
- 五、完整代码
一、随机抽样一致算法
我们可以通过求取上一张中的特征点匹配的方法,将多个图片拼接在一起。简单来说就是将这张图片做一个变换到另外一个图片上面去,中间就是一个变换矩阵。
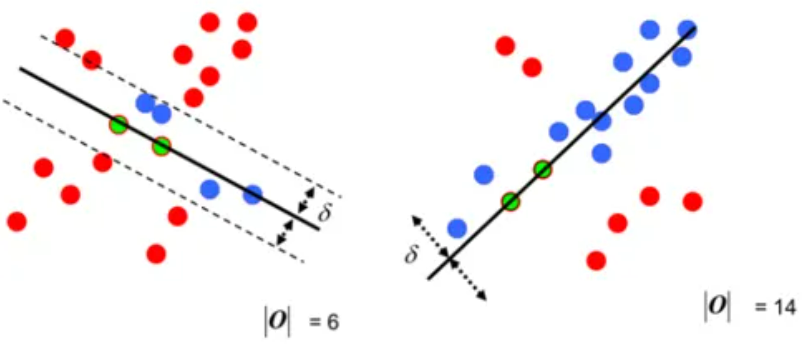
随机抽样一致算法(Random sample consensus,RANSAC):

由于局外点、异常点的干扰,最小二乘拟合的效果容易走偏,而随机抽样一致算法中的数据点更不容易走偏,拟合的效果更好。
选择初始样本点进行拟合,给定一个容忍范围,不断进行迭代。

随机算两个点,看落在区间内的点有多少个,越多越好。
每一次拟合后,容差范围内都有对应的数据点数,找出数据点个数最多的情况,就是最终的拟合结果:
单应性矩阵:

二、功能实现
全景图像拼接流程:
- 提取图像特征
- 对两张图片提取的特征点求变换矩阵
- 变换
-
图像拼接功能
- 支持将两张部分重叠的图像拼接成一张全景图像。
-
特征检测与匹配
- 使用 ORB 特征检测器和描述符进行关键点检测和特征提取。
- 使用 BFMatcher 进行关键点匹配。
-
参数调整
- 可调整拼接参数,如匹配比例和重投影误差阈值。
-
可视化
- 可选择是否显示关键点匹配可视化结果。
三、代码解析
-
Stitcher类
- stitch方法: 用于执行图像拼接。
- detectAndDescribe方法: 用于特征检测和描述。
- matchKeypoints方法: 用于关键点匹配和透视变换计算。
- drawMatches方法: 用于绘制关键点匹配可视化结果。
-
使用方法
- 准备两张待拼接的部分重叠图像。
- 调用 Stitcher 类的 stitch 方法,传入待拼接图像。
- 根据需要选择是否显示关键点匹配可视化结果。
- 获取拼接后的全景图像。
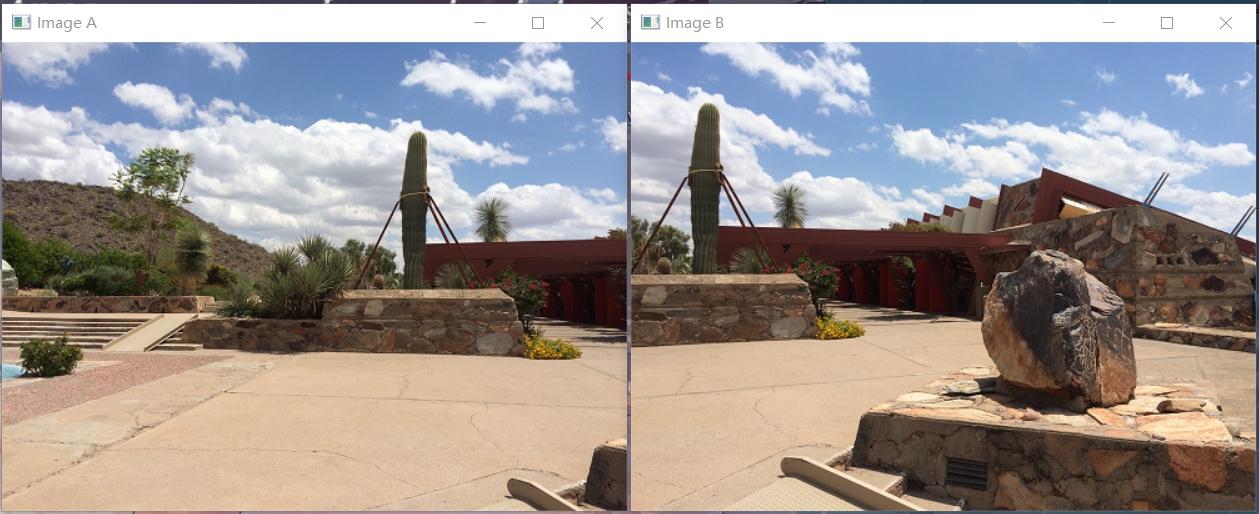
四、效果展示
两张原图:
关键点匹配:

拼接结果:

五、完整代码
#!/usr/bin/env python
# -*- coding:utf-8 -*-
"""
@Project : Stitcher-全景图像拼接-ORB特征检测器和描述符
@File : Stitcher.py
@IDE : PyCharm
@Author : 半亩花海
@Date : 2024/04/10 11:29
"""
import numpy as np
import cv2class Stitcher:def stitch(self, images, ratio=0.75, reprojThresh=4.0, showMatches=False): # 拼接函数# 解包输入图片(imageB, imageA) = images# 将图片转换为灰度图grayA = cv2.cvtColor(imageA, cv2.COLOR_BGR2GRAY)grayB = cv2.cvtColor(imageB, cv2.COLOR_BGR2GRAY)# 使用ORB特征检测器和描述符(kpsA, featuresA) = self.detectAndDescribe(grayA)(kpsB, featuresB) = self.detectAndDescribe(grayB)# 匹配特征点M = self.matchKeypoints(kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh)# 如果匹配结果为空,则返回Noneif M is None:print("Failed to stitch images. Not enough matches.")return None# 解包匹配结果(matches, H, status) = M# 进行透视变换,拼接图像result = cv2.warpPerspective(imageA, H, (imageA.shape[1] + imageB.shape[1], imageA.shape[0]))result[0:imageB.shape[0], 0:imageB.shape[1]] = imageB# 如果需要显示匹配结果,则返回拼接图和匹配可视化图if showMatches:vis = self.drawMatches(imageA, imageB, kpsA, kpsB, matches, status)return (result, vis)# 否则,只返回拼接图return result@staticmethoddef cv_show(name, img):# 显示图像cv2.imshow(name, img)cv2.waitKey(0)cv2.destroyAllWindows()@staticmethoddef detectAndDescribe(image):# 创建ORB特征检测器orb = cv2.ORB_create()# 检测特征点并计算描述符(kps, features) = orb.detectAndCompute(image, None)kps = np.float32([kp.pt for kp in kps])return (kps, features)@staticmethoddef matchKeypoints(kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh):# 创建BFMatcher对象matcher = cv2.BFMatcher()# 使用KNN匹配rawMatches = matcher.knnMatch(featuresA, featuresB, 2)# 进行筛选,获取匹配点对matches = []for m in rawMatches:if len(m) == 2 and m[0].distance < m[1].distance * ratio:matches.append((m[0].trainIdx, m[0].queryIdx))# 如果匹配点对数量大于4,则计算透视变换矩阵if len(matches) > 4:ptsA = np.float32([kpsA[i] for (_, i) in matches])ptsB = np.float32([kpsB[i] for (i, _) in matches])(H, status) = cv2.findHomography(ptsA, ptsB, cv2.RANSAC, reprojThresh)return (matches, H, status)# 否则,返回Nonereturn None@staticmethoddef drawMatches(imageA, imageB, kpsA, kpsB, matches, status):(hA, wA) = imageA.shape[:2](hB, wB) = imageB.shape[:2]vis = np.zeros((max(hA, hB), wA + wB, 3), dtype="uint8")vis[0:hA, 0:wA] = imageAvis[0:hB, wA:] = imageBfor ((trainIdx, queryIdx), s) in zip(matches, status):if s == 1:ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))ptB = (int(kpsB[trainIdx][0]) + wA, int(kpsB[trainIdx][1]))cv2.line(vis, ptA, ptB, (0, 255, 0), 1)return visif __name__ == "__main__":# 读取拼接图片imageA = cv2.imread("left_01.png")imageB = cv2.imread("right_01.png")# 把图片拼接成全景图stitcher = Stitcher()result = stitcher.stitch([imageA, imageB], showMatches=True)if result is not None:# 解包拼接结果(panorama, matchesVis) = result# 显示拼接前的两幅图像,匹配的关键点和拼接后的图像cv2.imshow("Image A", imageA)cv2.imshow("Image B", imageB)cv2.imshow("Keypoint Matches", matchesVis)cv2.imshow("Result", panorama)cv2.waitKey(0)cv2.destroyAllWindows()
这篇关于计算机视觉 | 基于 ORB 特征检测器和描述符的全景图像拼接算法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









