本文主要是介绍VMware虚拟机中ubuntu使用记录(10)—— 如何在Ubuntu18.04中使用自己的单目摄像头运行ORB_SLAM3(亲测有效,踩坑记录),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、ORB_SLAM3源码编译
- 二、ORB_SLAM3实时单目相机测试
- 1. 查看摄像头的话题
- 2. 运行测试
- 三. 运行测试可能的报错
- 1. 报错一
- (1) 问题描述
- (2) 原因分析
- (3) 解决
- 2. 报错二
- (1) 问题描述
- (2) 解决
前言
本次教程运行ORB_SLAM3,所需的环境如下:
Ubuntu18.04、ros版本:melodic
Opencv4.5.2、Pangolin0.6、
Boost库1.77.0版本、Eigen3.3.4
注意:以下的教程和所遇到的问题解决,使用的是v0.4-beta版本的ORB_SLAM源码,不同的版本遇到的问题和解决的方法不太一样!!!!!
一、ORB_SLAM3源码编译
所有的环境配置,安装的具体教程和踩坑记录,具体可以参考这篇博客:
这里就不赘述了
二、ORB_SLAM3实时单目相机测试
以usb单目摄像头为例,有安装过相应的驱动的,可直接进入下一步,若是没有,具体的驱动的安装,和相应的配置,具体参考这篇博客:VMware虚拟机中ubuntu使用记录(5)—— 如何在ubuntu中安装USB相机ros驱动并获取usb摄像头数据
1. 查看摄像头的话题
打开终端1:
roscore
在相机驱动的工作空间目录下,打开终端2:
source devel/setup.bash //生效过环境,可跳过此步roslaunch usb_cam usb_cam-test.launch //usb_cam为自己的驱动文件的名字
运行2终端的同时,Ctrl+Alt+T打开终端3:
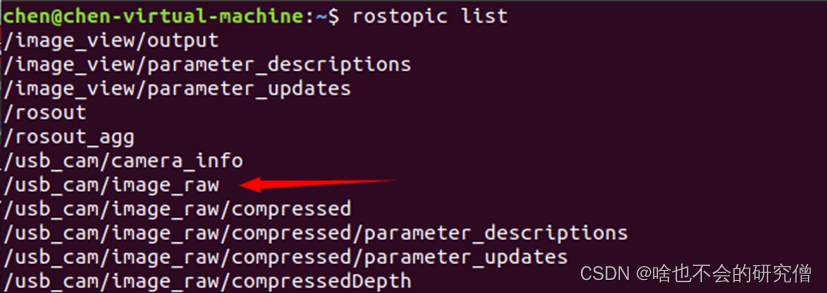
rostopic list
列出所有的ROS话题,其中/usb cam/image_raw为我单目摄像头的话题数据,如下图所示:
2. 运行测试
(1) 修改ros_mono.cc文件
由于本次测试的时单目,故只需在/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src目录下找到:ros_mono.cc文件,打开找到并修改成我们自己摄像头的订阅话题(usb_cam/imahe_raw),后面的参数“1”不用修改,如下图所示:

(2) 编译源码
回到src/ORB_SLAM3主目录再次运行:
chmod +x build_ros.sh
./build_ros.sh
(3) ORB_SLAM3运行相机
1)启动ROS,打开终端1:
roscore
2)开启相机
在自己创建工作空间(我的是catkin_ws/)目录下,打开终端2:
source devel/setup.bash //生效过环境,可跳过此步roslaunch usb_cam usb_cam-test.launch //改成自己的相机启动文件
3)运行ORB_SLAM3
在src/ORB_SLAM3目录下的终端输入:
rosrun ORB_SLAM3 Mono Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM3/My_camera.yam
指令的参数说明:
rosrun ORB_SLAM3 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
1.Mono
代表的是运行单目的意思,本次测试使用的是单目摄像头
2. PATH_TO_VOCABULARY
ORBvoc.txt特征词典文件路径,我的路径是:
/home/chen/catkin_ws/src/ORB_SLAM3/Vocabulary/ORBvoc.txt
3. PATH_TO_SETTINGS_FILE
即相机设置文件,官方提供的是Asus.yaml,可以另复制命名一个文件My_camera.yaml,将里面的相机参数修改成自己标定过的参数。
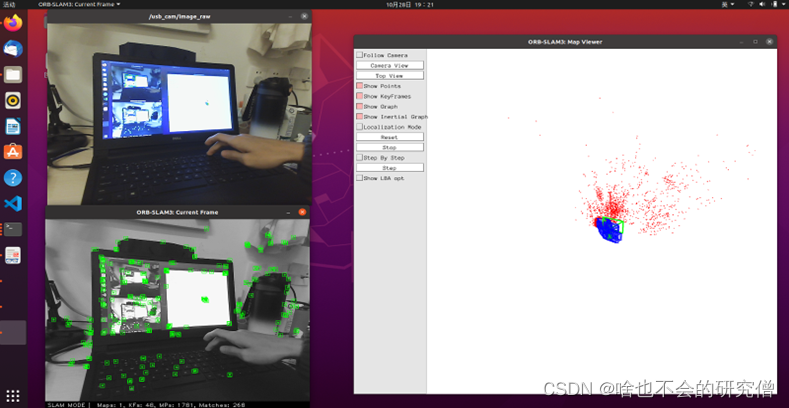
(4)最后运行成功的截图:
三. 运行测试可能的报错
1. 报错一
(1) 问题描述
rosrunORB_SLAM3 Mono Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM3/Asus.yaml
时出现如下:段错误(核心已转储),报错的页面如下图所示:
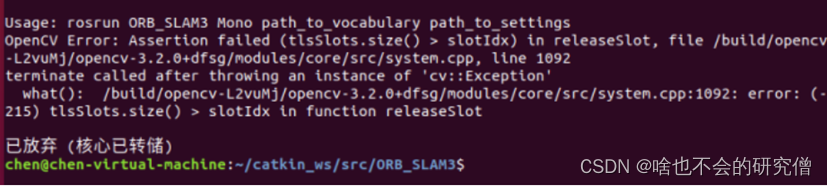
(2) 原因分析
在ORB_SLAM3/Thirdparty/DBoW2/CMakeLists.txt和ORB_SLAM3/CMakeLists.txt中,使用的是opencv4版本,而在ORB_SLAM3/Examples/ROS/ORB_SLAM3/CMakeLists.txt中,要求使用的是OpenCV3的版本,所以最后导致segmentation fault(段错误)。
(3) 解决
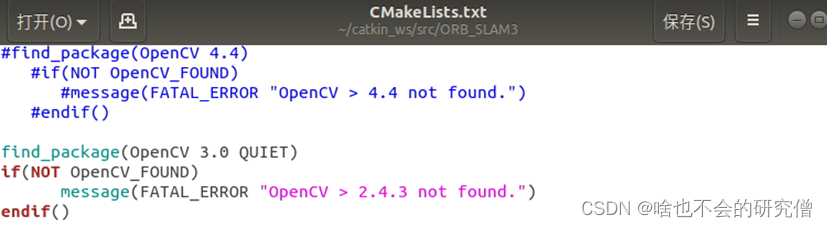
以下是在v0.4-beta版本的ORB_SLAM源码上进行的修改解决:修改opencv版本的最低要求,改成统一的opencv3版本
1)修改CMakeLists.txt文件的代码
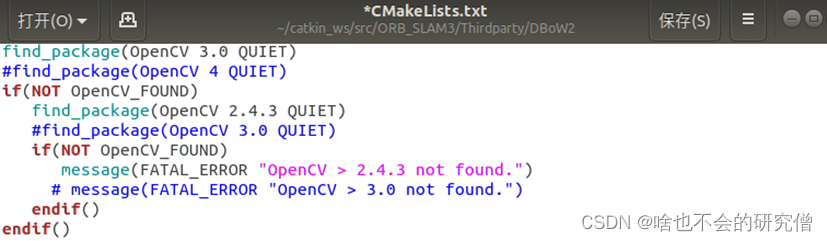
在ORB_SLAM3/CMakeLists.txt修改为:
在ORB_SLAM3/Thirdparty/DBoW2/CMakeLists.txt中修改为:
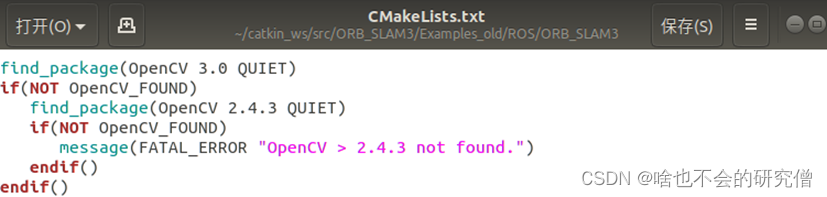
在ROS/ORB_SLAM3/CMakeLists.txt中不变
修改完成后再次编译源码:
./build.sh
2. 报错二
(1) 问题描述
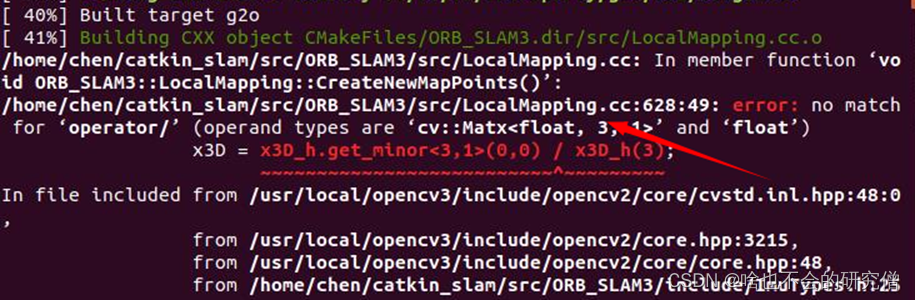
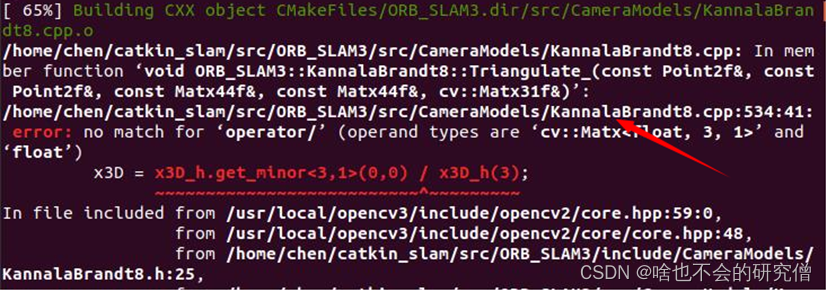
经过上述报错一中的修改之后,再次运行./build.sh编译代码时出现报错:no match for ‘operator’,具体的报错的信息如下所示:
(2) 解决
1)修改LocalMapping.cc文件
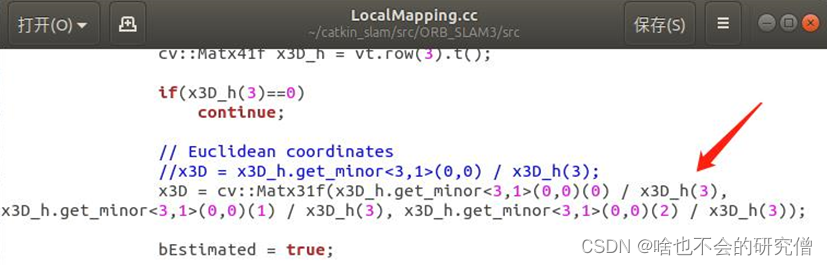
在src/ORB_SLAM3/src目录下的LocalMapping.cc文件,大概在628行,修改为:
x3D = cv::Matx31f(x3D_h.get_minor<3,1>(0,0)(0) / x3D_h(3), x3D_h.get_minor<3,1>(0,0)(1) / x3D_h(3), x3D_h.get_minor<3,1>(0,0)(2) / x3D_h(3));
修改位置如下图所示:
2)再次运行./build.sh
报错页面信息如下:
解决:
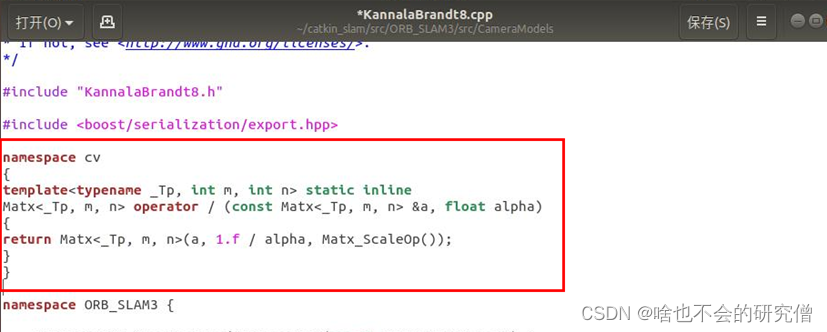
修改src/ORB_SLAM3/src/CameraModels目录下的KannalaBrandt8.cpp文件,大概在534行,修改为:
namespace cv
{
template<typename _Tp, int m, int n> static inline
Matx<_Tp, m, n> operator / (const Matx<_Tp, m, n> &a, float alpha)
{
return Matx<_Tp, m, n>(a, 1.f / alpha, Matx_ScaleOp());
}
}
修改的位置如下:
再次执行./build.sh,./build_ros.sh,不出意外就能编译成功!!!!!!
编译成功后,就可以使用自己相机配置文件实时运行ORB_SLAM3
这篇关于VMware虚拟机中ubuntu使用记录(10)—— 如何在Ubuntu18.04中使用自己的单目摄像头运行ORB_SLAM3(亲测有效,踩坑记录)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






