slam3专题
【ORB_SLAM系列4】—— 一文搞定如何在Ubuntu20.04中安装运行ORB_SLAM3(包含ROS版本和非ROS版本)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、ORB_SLAM源码下载1.源码下载 二、安装支持C++特性依赖三、安装Pangolin1. 安装Pangolin的依赖2. 下载编译 四、安装Opencv五、安装Eigen3六、DBoW2 and g2o七、安装boost库八、非ROS部分的源码编译和安装1. 编译之前先修改代码2. 编译源码 九、
VMware虚拟机中ubuntu使用记录(10)—— 如何在Ubuntu18.04中使用自己的单目摄像头运行ORB_SLAM3(亲测有效,踩坑记录)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、ORB_SLAM3源码编译二、ORB_SLAM3实时单目相机测试1. 查看摄像头的话题2. 运行测试 三. 运行测试可能的报错1. 报错一(1) 问题描述(2) 原因分析(3) 解决 2. 报错二(1) 问题描述(2) 解决 前言 本次教程运行ORB_SLAM3,所需的环境如下:

ORB-SLAM3如何加入GPS和Wheel轮速约束
0. 简介 对于ORB-SLAM3而言。如何将代码融入Wheel和GPS是一个挺有意思的事情。通过GPS和Wheel可以非常有效的约束视觉里程计结果。Wheel这块主要就是将速度等信息融合到前端中,类似IMU和视觉帧间的关系。而GPS由于频率不是很高,所以基本是用于全局修正的作用。这部分我们经常使用松耦合的形式,当然也有工作去做了紧耦合相关的工作。 1. Wheel特征添加 这一部分主要的其

【ORB-SLAM3】在 Ubuntu20.04 上编译 ORM-SLAM3 并使用 D435i 运行测试
【ORB-SLAM3】在 Ubuntu20.04 上编译 ORM-SLAM3 并使用 D435i 运行测试 1 Prerequisites1.1 C++11 or C++0x Compiler1.2 Pangolin1.3 OpenCV1.4 Eigen3 2 安装 Intel® RealSense™ SDK 2.02.1 测试设备2.2 编译源码安装 (Recommend)2.3 预编译包
在OAK-D S2相机上应用ORB_SLAM3
文章目录 ROS1 noetic + depthai_rosORB_SLAM3什么是ORB_SLAM3怎么安装 运行 ROS1 noetic + depthai_ros 目前X86和arch64平台测试安装包没有问题。 树莓派上安装ROS需要自己编译安装,时间比较长,需要测试的可以到 官网 查看,替换下面安装ROS步骤就可以了。 ubuntu20.04推荐安装noetic版本

Ubuntu18/20运行ORB-SLAM3
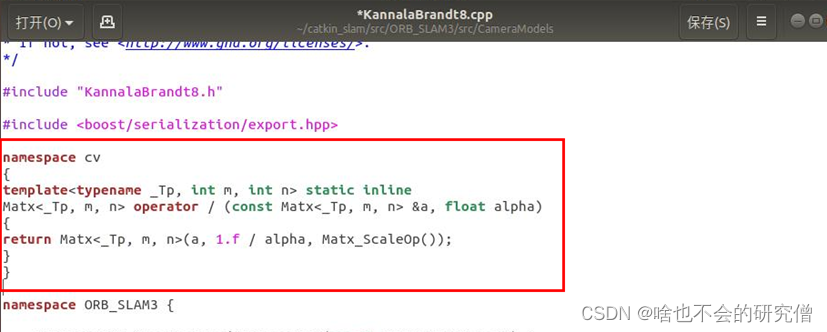
ORB-SLAM3复现(ubuntu18/20) 文章目录 ORB-SLAM3复现(ubuntu18/20)1 坐标系与外参Intrinsic parameters2 内参Intrinsic parameters2.1 相机内参① 针孔模型Pinhole② KannalaBrandt8模型③ Rectified相机 2.2 IMU内参 3 VI标定—外参3.1 Visual calibra
Ubuntu18.04运行ORB-SLAM3
ORB-SLAM3复现(ubuntu18) 文章目录 ORB-SLAM3复现(ubuntu18)1 坐标系与外参Intrinsic parameters2 内参Intrinsic parameters2.1 相机内参① 针孔模型Pinhole② KannalaBrandt8模型③ Rectified相机 2.2 IMU内参 3 VI标定—外参3.1 Visual calibration3.
ORB_SLAM3_优化方法 InertialBA
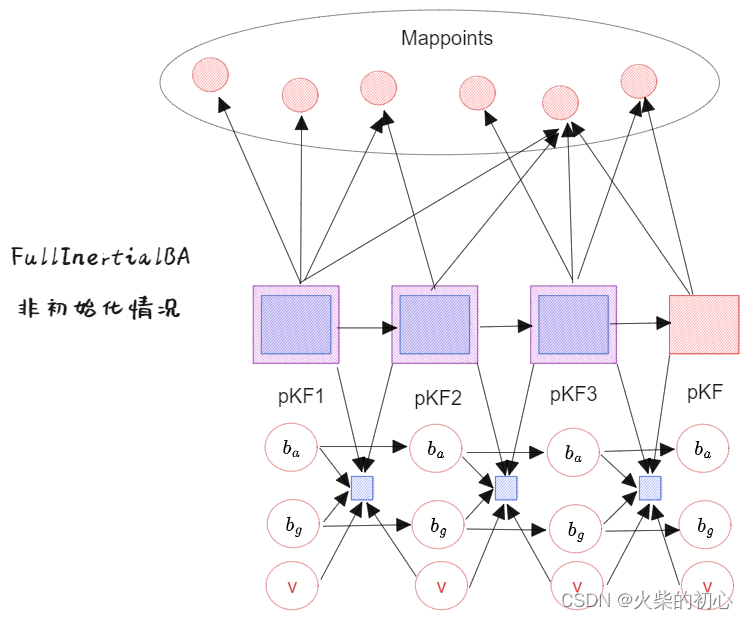
FullInertialBA FullInertialBA的主要作用是结合视觉和IMU信息进行联合优化,主要作用在LocalMapping中的initializeIMU和LoopClosing中的RunGlobalBundleAdjustment 在初始化阶段,bias固定不变,通过先验,约束bias为一个微小量 输入 参数说明pMap地图 初始化 g2o::Spar

ORB_SLAM3 IMU初始化
理论 假设单目SLAM的轨迹的误差相对于IMU的误差可以忽略,可以将视觉SLAM的轨迹视为常量考虑了IMU的噪声,然后利用一个MAP仅估计惯性参数一次性求解所有惯性参数,避免在解耦过程中造成不一致性。不对初始速度和姿态做任何假设不假设IMU的参数为0,而是将其已知信息作为MAP估计的先验信息 3 Step Vision-only MAP Estimation 主要获取精确的初始化视觉地图

ORB-SLAM3配置及安装教程(2023.3)
ORB-SLAM3配置及安装教程 实验简介1 实验环境2 准备工作(安装依赖)2.1 github clone2.2 Eigen3安装2.3 Pangolin安装2.4 Opencv安装2.5 DBoW2 and g2o2.6 安装boost库2.7 安装libssl-dev 3 ORB-SLAM3编译和安装 实验简介 配置了好多次ORB-SLAM3,看了一些博客,都写的不是很

ORB-SLAM3运行自制数据集进行定位教程
目前手上有一个特定的任务,做应急救援的视觉SLAM,目前公共数据集比较少,考虑自建数据集,从网络上爬虫火灾、地震的等手机录制的视屏,应用一些现有成熟ORB-SLAM3系统到这个数据集上看效果,然后根据效果得到一些模型改进思路。 文章目录 一、系统配置二、制作数据集1、脚本编写2、配置文件编写3、录制视频素材4、修改CMakeLists.txt5、编译运行 一、系统配置 系统版
ORB_SLAM3 LocalMapping中CreateNewMapPoints
CreateNewMapPoints在新插入的关键帧的邻近的关键帧中,通过词袋模型与新插入关键帧中没有匹配的ORB特征进行匹配,并抛弃其中不满足对极约束的匹配点对,接着通过三角化生成地图点 1.获取共视关键帧 GetBestCovisibilityKeyFrames:找出与当前关键帧共视程度最高前nn帧vpNeighKFs 如果是IMU模式,在vpNeighKFs不够nn帧的情况下,将当前关

ZED2相机运行VINS-Fusion和ORB-SLAM3
ZED2相机运行VINS-Fusion和ORB-SLAM3 1 关于zed2标定2 运行VINS-Fusion3 运行ORB-SLAM3 1 关于zed2标定 我最开始被zed2的标定问题折磨了好久,用kalibr工具标定出来的结果始终不好,投影误差甚至达到了5-10个像素。 后来我在github上发现有人问了这么一个问题: https://github.com/stereol

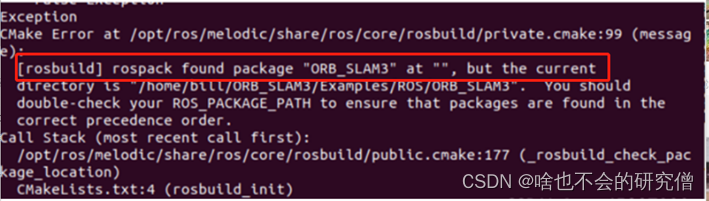
ORB-SLAM3编译与运行问题汇总
毕设要做ORB-SLAM3相关内容,对于我这种slam初学者来讲难度还是挺大的,总结实践中碰到的各种问题。 ORB-SLAM3编译问题汇总 1 安装Eigen3.3.92 编译ROS版本2.1 添加环境变量2.2 fatal error: xxx.h: 没有那个文件或目录2.3 ‘ORB_SLAM2’ has not been declared2.4 “pangolin” inclu

ORB-SLAM3的Local Mapping线程详解
Local Mapping线程是ORB-SLAM3的三大线程之一。 文章目录 一、Local Mapping线程的主要流程二、Local Mapping线程主要作用1、插入关键帧2、剔除地图点 一、Local Mapping线程的主要流程 关键帧是通过根据经验去添加一些约束给帧,然后输出关键帧,如果能被观测到更多特征点的话,那么我们就能把其作为关键帧。 第一部分是插入关键帧

【无人机自主导航5 SLAM】Intel Realsense T265C双目相机实现ORB-SLAM3
转载自:https://dgzc.ganahe.top/ganahe/2021/wrjzzdhsjirtsmxj.html 【无人机自主导航5 SLAM】Intel Realsense T265C双目相机实现ORB-SLAM3 C/C++ GanAHE 4个月前 (03-21) 32次浏览 已收录 5个评论 扫描二维码 文章目录[隐藏] 一、ORB-SLAM3依赖二、ORB-SLAM3配置

【无人机自主导航7 SLAM】大疆Manifold2C平台及Intel Realsense D435i RGB-D相机实现ORB-SLAM3
转载自:https://blog.csdn.net/weixin_42646103/article/details/115678880?spm=1001.2014.3001.5501 【无人机自主导航7 SLAM】大疆Manifold2C平台及Intel Realsense D435i RGB-D相机实现ORB-SLAM3 分类专栏: 无人机 学习分享笔记 文章标签: linux 无人
【教程】从零开始的ORB-SLAM3的安装与配置
引言 最近项目需求需要接触vslam,博主选择从ORB-SLAM3下手并且记录下安装的基本流程。不得不说,这安装流程就像二大娘的裹脚布。 大致环境前提:Ubuntu20.04 一、ORB-SLAM3的源码下载 1、首先,为了方便管理文件,我们新建一个SLAM文件夹,在文件夹中打开终端,输入以下指令下载ORB-SLAM3源码,得到ORB-SLAM3文件夹: 二、相关库文件安装 1

《论文笔记》ORB-SLAM3:An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM》
《ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM》 作者:Carlos Campos∗, Richard Elvira∗, Juan J. Gómez Rodr´ ıguez, José M.M. Montiel and Juan D. Tardós 单位:

windows运行orb-slam3遇到的问题
windows版代码地址:https://github.com/melhashash/orbslam3-windows 编译完成,出现初始化不成功的现象。 问题一: 相机参数中没有相机类型,导致畸变参数初始化失败。 GrabImageRGBD中frame对象实例化时,缺少相机参数,导致相机对象为空
1.ORB-SLAM3中如何保存多地图、关键帧、地图点到二进制文件中
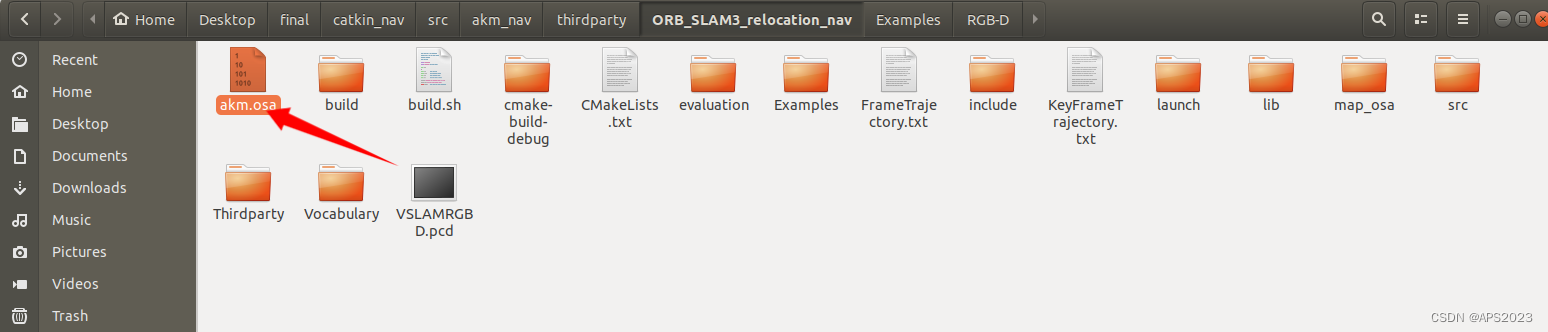
1 保存多地图 1.1 为什么保存(视觉)地图 因为我们要去做导航,导航需要先验地图。因此需要保存地图供导航使用,下面来为大家讲解如何保存多地图。 1.2 保存多地图的主函数SaveAtlas 2051 mStrSaveAtlasToFile是配置文件中传递的参数: 这里我们赋值成了akm(string mStrSaveAtlasT

用笔记本自带摄像头跑通ros1 ORB_SLAM3单目程序
环境:ubuntu20.4 ros1 noetic 联想think pad x230自带摄像头 没有安装好ORB_SLAM3请参考 https://fishros.org.cn/forum/topic/842/视觉slam-orb_slam3在ubuntu18-04-ubuntu20-04-安装运行测试orb_slam3 适配单目 双目 rgbd摄像头,最容易跑通的是单目,用笔记本自带的摄像头

在docker环境下从头搭建openvslam/orb_slam3的流程记录以及问题总结
文章目录 0. 前言1. MobaXterm软件2. docker操作2.1. 拉一个ubuntu镜像2.2. 修改名字(可选)2.3. 删除之前的docker镜像(可选) 3. openvslam搭建流程3.1. 起容器3.2. 前置包的安装3.3. 安装Eigen3.4. 安装opencv3.5. 安装DBoW23.6. 安装g2o3.7. 安装Pangolin库3.8. 安装yaml-
RealSense T265相机使用及运行ORB-SLAM3
1、驱动安装。同realsense D435i,不做介绍。 2、运行realsense-viewer查看效果 3、修改rs_t265.launch文件,查看运行效果,作如下修改: <arg name="enable_fisheye1" default="true"/><arg name="enable_fisheye2" default="true"/><arg nam

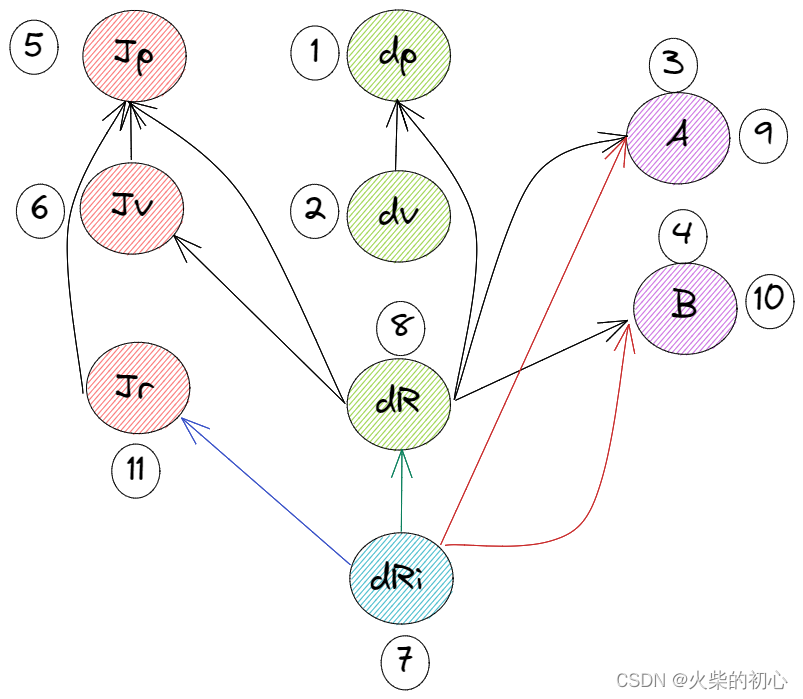
ORB_SLAM3_IMU预积分理论推导(更新)
ORB SLAM3系统初始化ORB SLAM3 构建FrameORB_SLAM3 单目初始化ORB_SLAM3 双目匹配ORB_SLAM3_IMU预积分理论推导(预积分项)ORB_SLAM3_IMU预积分理论推导(噪声分析)ORB_SLAM3_IMU预积分理论推导(更新)ORB_SLAM3_IMU预积分理论推导(残差)ORB_SLAM3_优化方法 Pose优化ORB_SLAM3 闭环检测 预
ORB_SLAM3 IMU预积分PreintegrateIMU
这篇博文主要分享ORB_SLAM3中Tracking::PreintegrateIMU(),其主要包括几个部分: 获得两帧之间的IMU数据中值积分IMU状态更新 关于IMU的理论推导参考: ORB_SLAM3_IMU预积分理论推导(预积分项)ORB_SLAM3_IMU预积分理论推导(噪声分析)ORB_SLAM3_IMU预积分理论推导(更新)ORB_SLAM3_IMU预积分理论推导(残差)