本文主要是介绍运行ORB-SLAM2(单目+AR)遇到的问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. 在运行实时单目时(单目相机的实时图像作为输入数据)
需要在systerm.h的文件头加上#include <unistd.h>,,并且在ros_mono.cc,ros_mono_ar.cc(这个在该文件夹的AR文件夹里面)将
ros::Subscriber sub = nodeHandler.subscribe("/camera/image_raw", 1,&ImageGrabber::GrabImage,&igb);更改为ros::Subscriber sub = nodeHandler.subscribe("/usb_cam/image_raw", 1, &ImageGrabber::GrabImage,&igb);
然后回到ORB-SLAM2重新授权并且编译chmod +x build_ros.sh ./build_ros.sh。之后要是遇到报错
则在ROS/ORB-SLAM2下的CMakeLists.txt中添加 -lboost_system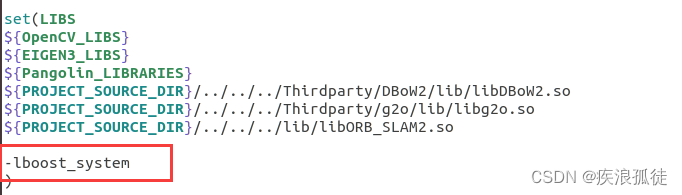
然后再重新授权并且编译。编译完成后就可以开始执行实时单目ORB-SLAM2
打开终端一进入ROS环境:roscore
打开终端二(调用usb_cam)节点:cd catkin_ws/src/usb_cma/src/sub_cam/launch
在ORB-SLAM2文件夹下打开终端三并运行:osrun ORB_SLAM2 Mono Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml
其中参考了这位博主的博客(18条消息) Ubuntu18.04配置orb-slam2+ROS,一次性通过./build_ros.sh_orbslam配置_月的挥手的博客-CSDN博客
2. 利用单目相机实时跑ORB-SLAM2的AR程序时,需要注意以下几点:
a. 注意ORB-SLAM2下的ROS文件需是编译过的,在ROS/ORB-SLAM2的文件夹应该有build文件,MonoAR、Mono、RGBD和Stereo文件都是依靠编译ROS之后生成的
b. 在运行MonoAR前要把AR中的ros_monoar.cc中的ros::Subscriber sub = nodeHandler.subscribe("/camera/image_raw", 1 更改为ros::Subscriber sub = nodeHandler.subscribe("/usb_cam/image_raw", 1
c.在ORB-SLAM2文件夹下运行
rosrun ORB_SLAM2 MonoAR Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/Asus.yaml
其中部分参考了这位博主的博客(18条消息) Ubuntu 16.04 ORB_SLAM2+ROS+usb_cam+AR_HFKuAng的博客-CSDN博客
这篇关于运行ORB-SLAM2(单目+AR)遇到的问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







