robotics专题

Science Robotics 首尔国立大学研究团队推出BBEX外骨骼,实现多维力量支持!
重复性举起物体可能会对脊柱和背部肌肉造成损伤,由此引发的腰椎损伤是工业环境等工作场所中一个普遍且令人关注的问题。为了减轻这类伤害,有研究人员已经研发出在举起任务中为工人提供辅助的背部支撑装置。然而,现有的这类装置通常无法在非对称性的举重过程中提供多维度的力量支持。此外,针对整个人体脊柱的设备安全性验证也一直是一个缺失的环节。 据探索前沿科技边界,传递前沿科技成果的X-robot投稿,来自首尔国立

【机器人工具箱Robotics Toolbox开发笔记(二十)】机器人工具箱SerialLink I类函数参数说明
机器人工具箱中的SerialLink表示串联机器人型机器人的具体类。该类使用D-H参数描述,每个关节一组。SerialLink I类包含的参数如表1所示。 表1 SerialLink I类参数 参 数 意 义 参 数 意 义 plot 显示机器人的图形表示 jacobn 工具坐标系中的雅可比矩阵 plot3D 显示机器人3D图形模型 Jacob_dot

【机器人工具箱Robotics Toolbox开发笔记(二)】Matlab中机器人工具箱的下载与安装
Matlab机器人工具箱(Robotics Toolbox)可从Peter Corke教授提供的网站上免费下载。网址为:http://www.petercorke.com/Robotics_Toolbox.html。 图1 网站所提供的机器人工具箱版本 在Downloading the Toolbox栏目中单击here按钮进入下载页面,然后在该页面中填写国家、组织和身份等信息,进入机器人工

【机器人工具箱Robotics Toolbox开发笔记(四)】 机器人位姿变换之位姿变换函数
机器人学的位姿变换相关内容,可以采用下列函数来进行计算。 (1)rpy2r() R = rpy2r (roll, pitch, yaw, options)能够根据一组回转角、俯仰角和偏转角求出对应齐次变换矩阵中的旋转矩阵R(3x3),其中3个角度rpy = [R, P, Y]分别对应于关于x、y、z轴的顺序旋转。 R = rpy2r (rpy, options)与前者相同,但是输入的是一个向量
Underactuated Robotics - 欠驱动机器人学(三)- 体操机器人、小车摆杆和四旋翼飞行器
系列文章目录 前言 在低维模型系统的背景下,已经开展了大量有关欠驱动系统控制的工作。这些模型系统捕捉到了问题的本质,却没有引入更真实世界的例子中经常涉及的所有复杂性。在本章中,我们将重点讨论两个最著名、研究最深入的模型系统--Acrobot 和 Cart-Pole。在我们开发了一些工具后,我们将看到这些工具可以直接应用于其他模型系统;我们将使用四旋翼机器人举出一些例子。所有这些系统都是

Apple Explores Robotics in Search of Life Beyond the iPhone
Apple is exploring a push into robotics — both to gain a foothold in consumers’ homes and add a new dimension to its product lineup. Also: Meta nears the launch of a cheaper Quest; Apple tries a new V

【添加核心机械臂动力学】Model and Control a Manipulator Arm with Robotics and Simscape
机械臂动力学 为了设计控制器,机械臂动力学必须表示给定力矩输入的关节位置。这在机械臂动力学子系统中通过一个前向动力学块实现,该块将关节力矩转换为给定当前状态的关节加速度,然后通过两次积分得到完整的关节配置。积分器初始化为q0和dq0,即初始关节位置和速度。 此外,夹爪控制子系统将关节控制力矩覆盖到夹爪执行器上,应用10牛顿的力来打开或关闭夹爪。 需要注意的是,第二个积分器是饱和的。 虽然设计
Science Robotics 与蜜蜂群互动的蜂窝型机器人系统
蜜蜂,如黄蜂,蚂蚁和其他社会昆虫,建立大型自组织群体,通常被解释为自我调节的“超有机体”。这些超生物是生态系统的重要稳定剂,因此被认为是“关键物种”。例如,蜜蜂群落通过觅食授粉服务的生态效应对陆地生态系统是巨大的。蜜蜂是最重要的真社会传粉者,因此对我们的食物供应至关重要。在这些方面,蜜蜂及其对生态系统的影响是实现联合国可持续发展目标的重要组成部分。 然而,多种人为压力源危及蜜蜂种群。冬季是最关键的
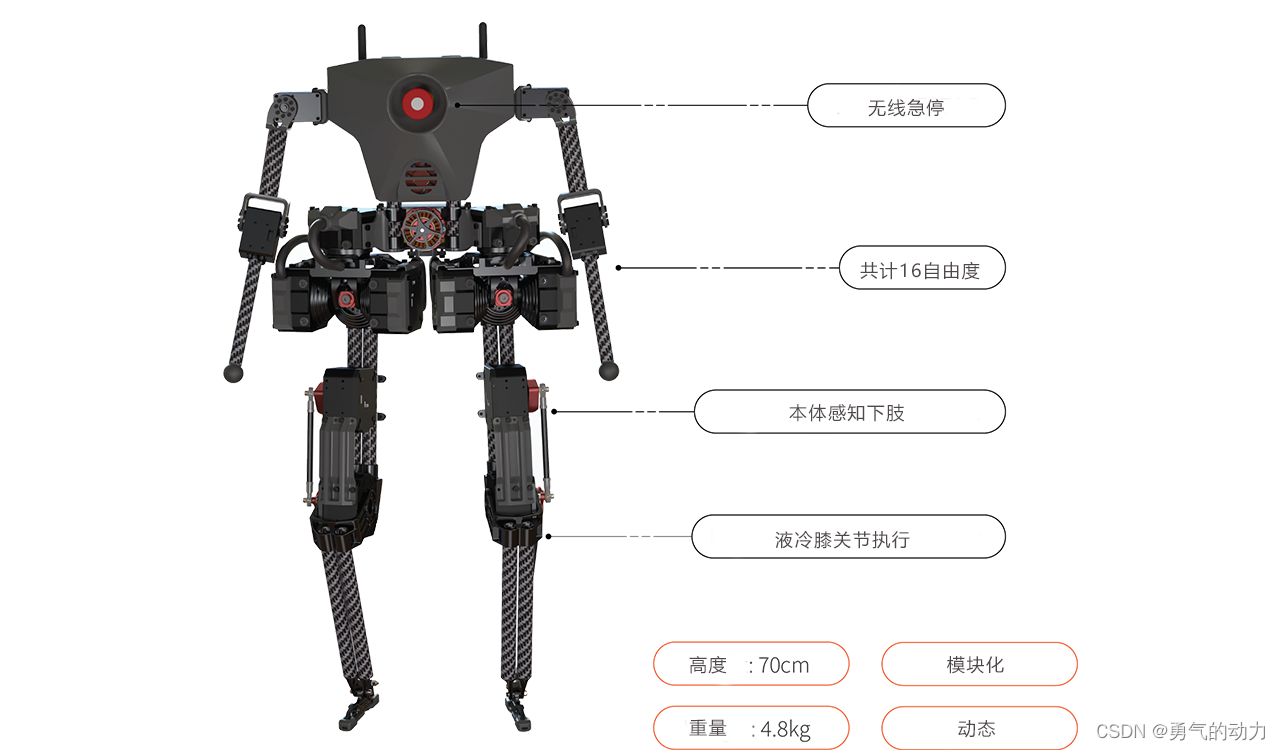
西木科技Westwood-Robotics人型机器人Bruce配置和真机配置
西木科技Westwood-Robotics人型机器人Bruce配置和真机配置 本文内容机器人介绍Bruce机器人Gazebo中仿真代码部署Bruce真机代码部署 本文内容 人形机器人Brcue相关介绍docker中安装Gazebo并使用Bruce机器人控制器更换环境配置 机器人介绍 公司:西木科技Westwood-Robotics官网 Westwood Robotics(西木
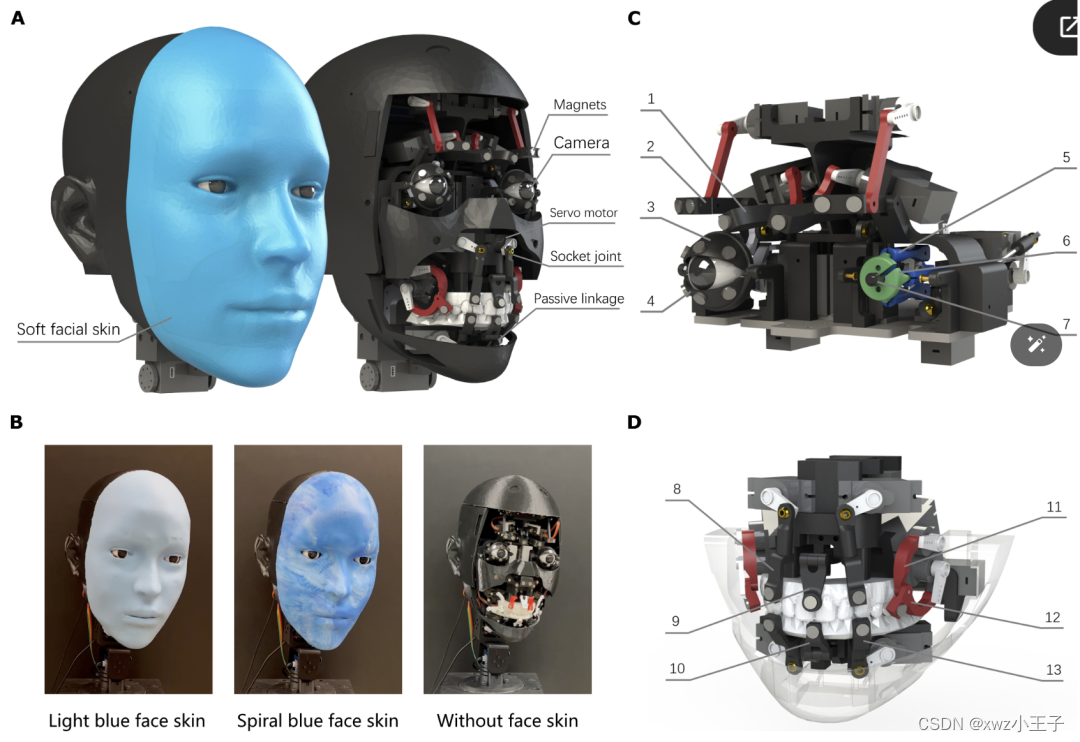
Science Robotics 逼真面部表情的机器人
人类可以产生数千种不同的面部表情来传达无数微妙的情绪状态,这种能力是人类社会互动中最有效和最有效的界面之一。在 2019 年冠状病毒病流行期间,口罩使社交互动变得尴尬,因为它们掩盖了面部表情。同时,当摄像机打开时,远程会议变得更加有效。同样,一旦机器人能够展现出丰富的三维(3D)面部表情,它们就可以增强他们的沟通能力,更有利于与人类建立信任。 当前大型语言模型正在推动机器人语言交流的快速发展,但非
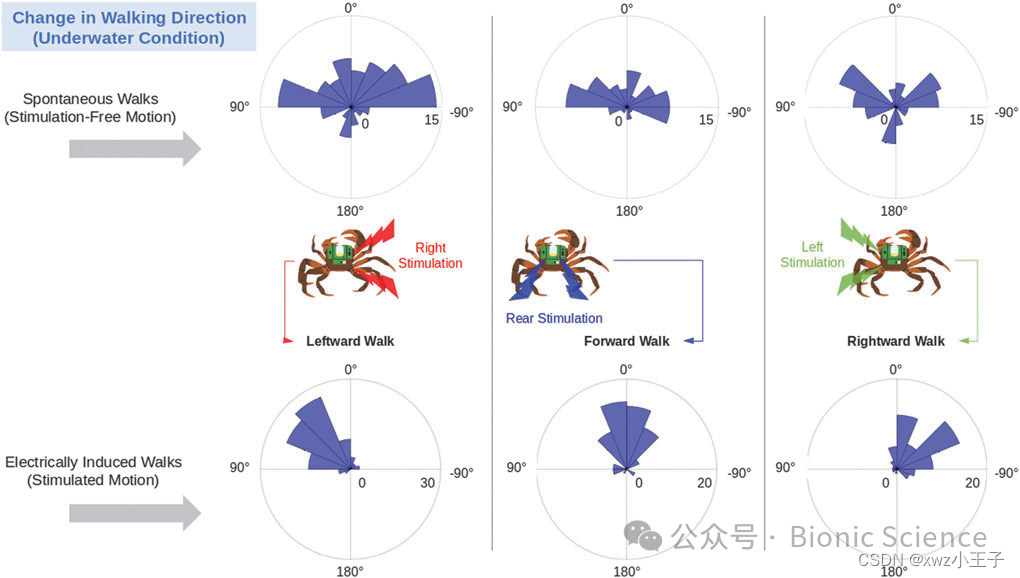
Soft Robotics:两栖环境下螃蟹仿生机器人的行走控制
传统水陆两栖机器人依靠轮胎或履带与表面的接触及摩擦产生推进力,这种对于表面接触的依赖性限制了现有水陆两栖机器人在低重力环境下(如水中)的机动性。利用生物自身的推进机制,人为激发生物运动行为,由活体生物与微机电系统组成的生物-机械混合系统为构建微小型水陆两栖机器人提供新思路。在广泛的生物载体中,螃蟹由于具有独特的步态,除此以外,螃蟹在水中使用鳃进行气体交换,使其可以在水下长期停留而不需浮到水面上,这

Ubuntu18.04 中编译 TI 官方的ros驱动包中 autonomous_robotics_ros 包所存在的问题及解决方案
环境: 安装有 ROS 系统的 Ubuntu18.04 环境,并且已将 TI 官方的毫米波雷达 ROS 驱动下载到Ubuntu18.04系统中,如需获取此代码请点击此链接根据教程下载即可。 代码下载链接:TI IWR6843ISK ROS驱动程序搭建-CSDN博客 问题1: 编译时出现没有 turtlebot_msgs 安装包的提示 解决方案: 将下面链接中的代码克隆或者下载z
![[论文笔记]二“Resouce Allocation and Service Provisioning in Multi-Agent Robotics: A Comprehensive Survey“](https://img-blog.csdnimg.cn/202103311142442.png)
[论文笔记]二“Resouce Allocation and Service Provisioning in Multi-Agent Robotics: A Comprehensive Survey“
PS:Multi-Agent Cloud Robotics以下简称MACR。 一、摘要 机器人应用的广泛使用能提高操作自动化以及CPS系统的性能(包括工业4.0、智慧农业、智慧医疗、灾难管理)。但是,单个机器人的算力和存储能力有限,无法处理这些延迟敏感、数据密集型以及计算密集型的任务,因此多个机器人协同工作构建一个互补的环境同时利用边云资源处理大规模的应用可以解决以上问题。但随之而来的是,机器人的
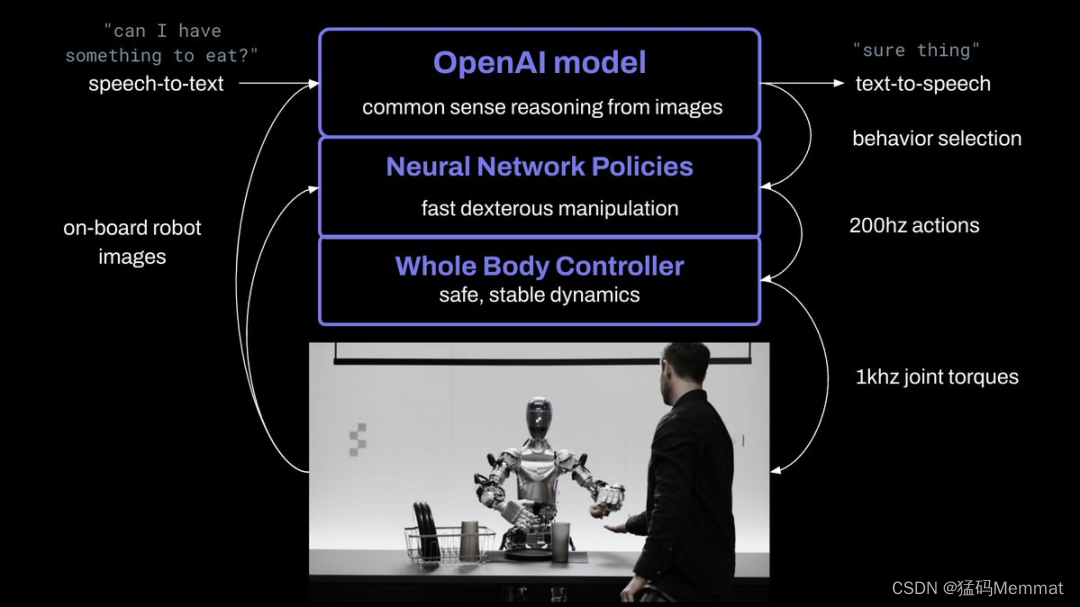
人形机器人进展:IEEE Robotics出版双臂通用协同机械手操作架构
文章目录 1. Main2. My ThoughtsReference彩蛋a. OpenAI 投资: 人形机器人公司 Figure AIb. 人工智能软件工程师 Devin 上线 1. Main 图1 人居环境下的人形双臂机器人系统 通用人形机器人 作为近年来机器人与AI交叉领域的研究热点和技术竞争高地,因其具备在 非结构化人居环境 中承担各种琐碎家务的潜力而得到广
Underactuated Robotics - 欠驱动机器人学(一)- 全驱动与欠驱动系统
系列文章目录 前言 如今的机器人行动过于保守,只能完成机械性能所能完成的一小部分任务,实现一小部分性能。在某些情况下,我们仍然从根本上受限于在结构化工厂环境中成熟的刚性机械臂控制技术,在这种环境中,可以使用大型致动器来 "塑造 "机器的动态,以实现精度和可重复性。欠驱动机器人技术的研究重点是构建控制系统,利用机器的自然动态,力图在速度、效率或鲁棒性方面实现非凡的性能。
论文翻译:OK-Robot: What Really Matters in Integrating Open-Knowledge Models for Robotics
OK-Robot: What Really Matters in Integrating Open-Knowledge Models for Robotics OK-Robot:整合开放知识模型在机器人学中的真正重要性 文章目录 OK-Robot: What Really Matters in Integrating Open-Knowledge Models for RoboticsO
matlab Robotics Toolbox
工具箱下载地址:ROBOTICS TOOLBOX 安装教程 笛卡尔运动规划 在MATLAB中,ctraj和jtraj是两个不同的函数,主要用于控制系统和机器人学中的轨迹规划。它们之间的主要区别在于它们处理的问题类型和使用方式。 ctraj(连续时间轨迹规划): ctraj 用于连续时间系统的轨迹规划。这个函数通常用于动态系统,其中状态是连续变化的。它主要用于生成系统状态的时间演化,并通过指
matlab Robotics System Toolbox
笛卡尔运动规划 在MATLAB中,ctraj和jtraj是两个不同的函数,主要用于控制系统和机器人学中的轨迹规划。它们之间的主要区别在于它们处理的问题类型和使用方式。 ctraj(连续时间轨迹规划): ctraj 用于连续时间系统的轨迹规划。这个函数通常用于动态系统,其中状态是连续变化的。它主要用于生成系统状态的时间演化,并通过指定的控制输入实现所需的轨迹。 示例代码: [t, x] = c
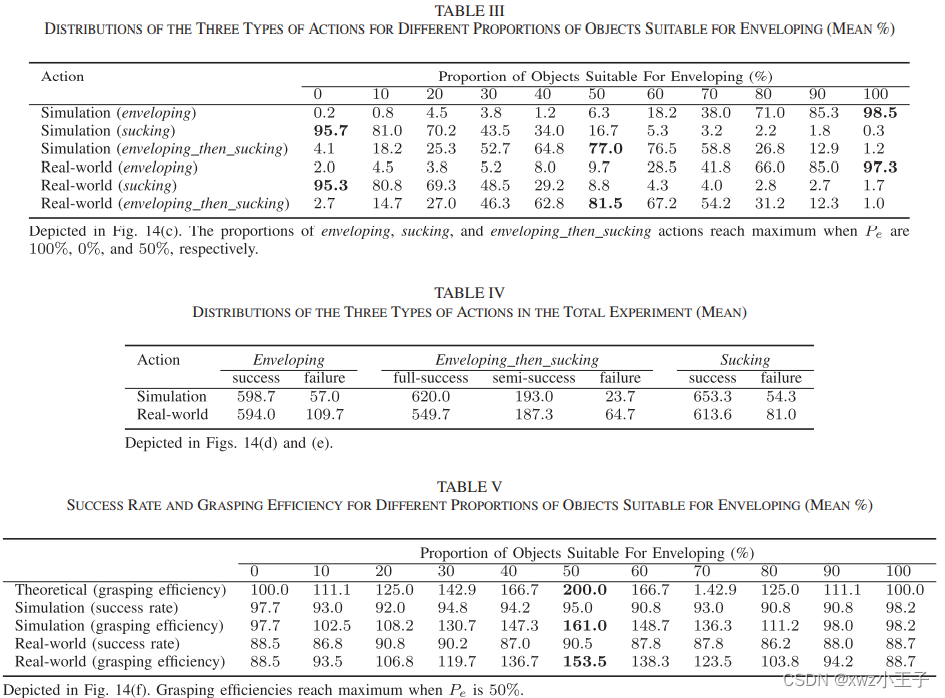
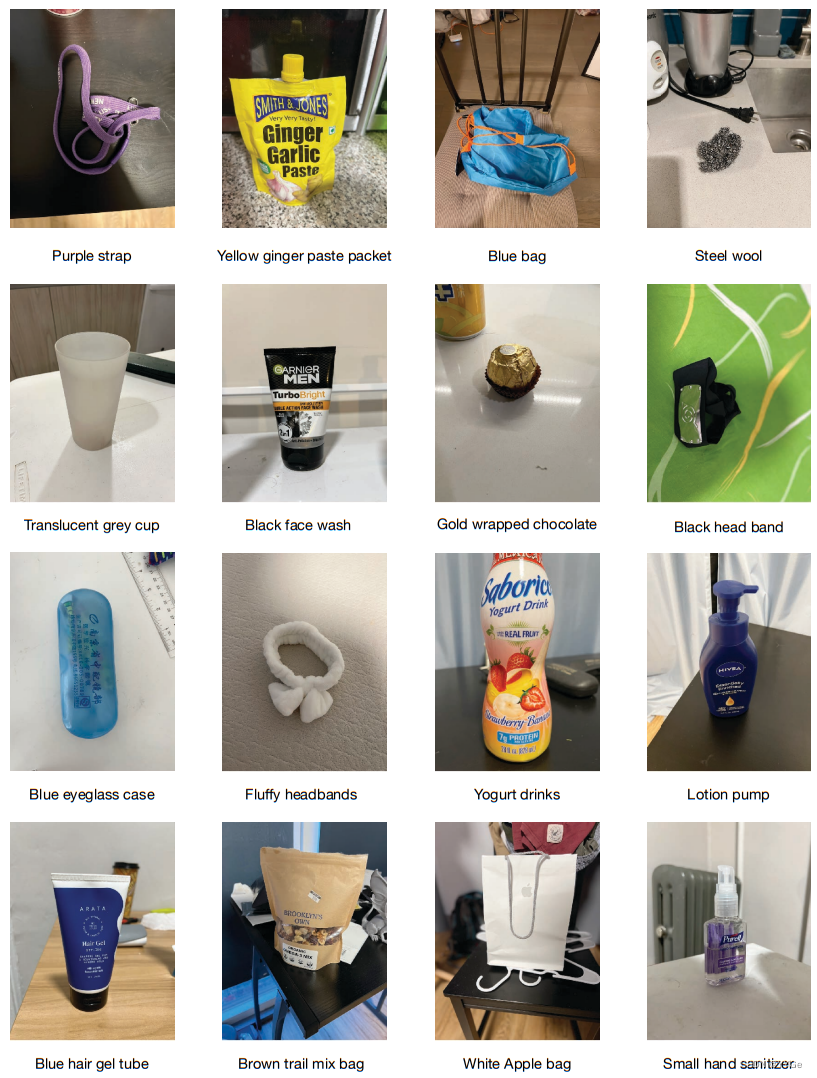
“抓取再吸取的连续操作学习”研究工作发表于IEEE Trans. on Robotics:仿人手的柔性抓取,超人手的指背吸取!
长期以来,抓取一直被认为是机器人操作中一项重要而实际的任务。然而,实现对不同物体的稳健和有效的抓取具有挑战性,因为它涉及夹具设计、感知、控制和学习等。最近基于学习的方法在抓取各种新物体方面表现出优异的性能。然而,这些方法要么通常仅限于一种单一的抓取模式,要么需要更多的末端执行器来抓取各种物体。此外,末端手的设计和学习方法通常是单独开发的,这可能无法充分探索多模态抓取能力。 Hybrid Robo

Agility Robotics 为亚马逊仓库批量生产的人形机器人
一家旨在每年生产 10000 个两足机器人的革命性工厂即将在俄勒冈州塞勒姆成形。 这些机器人由 Agility Robotics 开发,旨在协助亚马逊等行业巨头运输、起重和处理危险货物。 Agility Robotics 表示,其名为 RoboFab 的新制造工厂将成为世界上第一个大规模生产人形机器人的工厂。 这些被称为 Digit 的机器人预计将比目前使用的工业机器人更加敏捷和通用。
机器人最优控制开源库 Model-based Optimization for Robotics
系列文章目录 文章目录 系列文章目录前言一、开源的库和工具箱1.1 ACADO1.2 CasADi1.3 Control Toolbox1.4 Crocoddyl1.5 Ipopt1.6 Manopt1.7 LexLS1.8 NLOpt1.9 qpOASES1.10 qpSWIFT1.11 Roboptim 二、其他库和工具箱2.1 MUSCOD2.2 OCPID-DAE12.3 SN
基于Matlab机器人系统工具箱(Robotics System Toolbox)对库卡LBR Med 7 R800进行建模分析(一)
本文主要讲解利用机器人系统工具箱(Robotics System Toolbox)对库卡LBR Med 7 R800进行建模,以及利用模型对其进行正、逆解运算分析,库卡LBR Med 7 R800本体图如下: 首先利用Matlab机器人系统工具箱(Robotics System Toolbox)中的刚体树(rigidbodytree)对机器人进行建模,代码如下: %创建一个机器人刚体树对
使用 matlab 的 Robotics ToolBox 完成5自由雄克机械臂的建模与运动学仿真,并计算8个点的运动轨迹,绘制运动动画
机器人包含5个关节,建立以下的DH参数表 matlab代码 %机器人学导论仿真大作业(RTB)clear clch = figure;axis tight manualfilename = 'SchunkRobot_Simulation.gif';%Schunk机械臂参数的输入L1=0.35;L2=0.305;L3=0.3;%DH参数建立Joint1 = Link([ 0

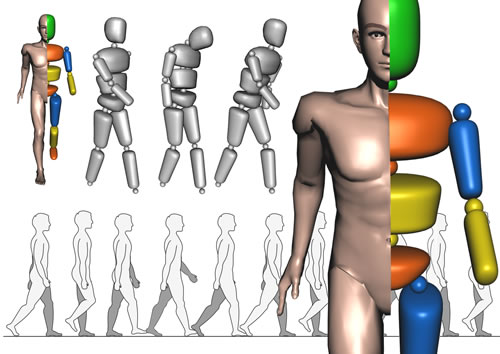
underactuated robotics lecture 1 笔记 --- Introduction
1. Introduction 最近因为目前的项目中,可能会用到一些基于动力学的planning 和control的算法,看了一下MIT欠驱动机器人的课程,通过记笔记的方式帮助自己查缺补漏。笔记基本上按照讲课的顺序进行梳理,穿插一些在matlab上实现的结果和个人的理解。 2 Motivation 2.1.1 Honda ASIMO vs passive dynamic walkers A
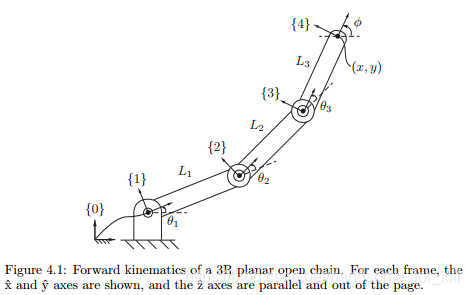
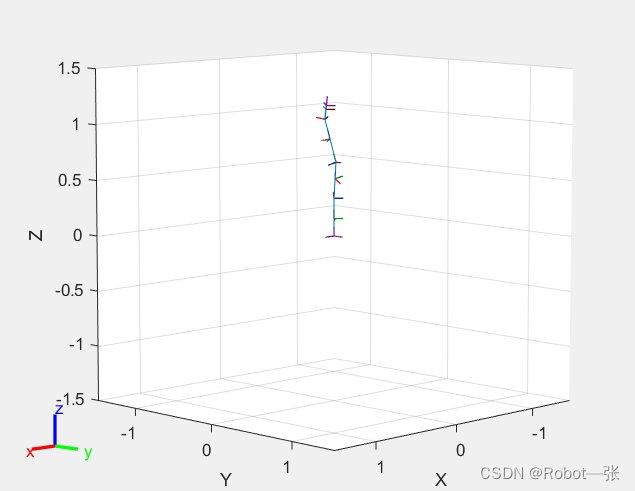
《Modern Robotics》阅读笔记6——前向运动学
《Modern Robotics》阅读笔记6——前向运动学 前向运动学(Forward Kinematics)是《Modern Robotics》一书的第三章,这章主要介绍的内容就是如何基于旋量理论使用PoE(Product of Exponentials)形式求解机器人的前向运动学。有了之前对于旋量理论的了解,这一章的内容非常简单。 前向运动学:描述的是从关节角(关节平移)到机器人末端位姿的

RT-2(robotics-transformer2)论文翻译——2
说明: ChatGPT等基于Transformer的大语言模型(LLM)的成功带给了人们巨大的震撼,其表现的few-shot甚至zero-shot能力仿佛让人们看到了通用人工智能(AGI)的曙光。而CLIP等跨模态模型打通了NLP和CV的界限,这些VLM模型将AGI发展继续向前推进。 AGI在机器人领域同样有很大的提升空间。试想如果机器人拥有了LLM般的思考能力,那世界将变得多么智能!届时的机