本文主要是介绍西木科技Westwood-Robotics人型机器人Bruce配置和真机配置,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
西木科技Westwood-Robotics人型机器人Bruce配置和真机配置
- 本文内容
- 机器人介绍
- Bruce机器人Gazebo中仿真代码部署
- Bruce真机代码部署
本文内容
- 人形机器人Brcue相关介绍
- docker中安装Gazebo并使用
- Bruce机器人控制器更换环境配置
机器人介绍
公司:西木科技Westwood-Robotics官网
Westwood Robotics(西木科技)是一家创立于2018年的美国公司,总部位于洛杉矶。该公司的创始团队成员主要源自加州大学洛杉矶分校的Robotics & Mechanisms Laboratory(RoMeLa)实验室。RoMeLa实验室在机器人学术界具有极高的声望,它由著名机器人学教授Dennis Hong创立并领导。
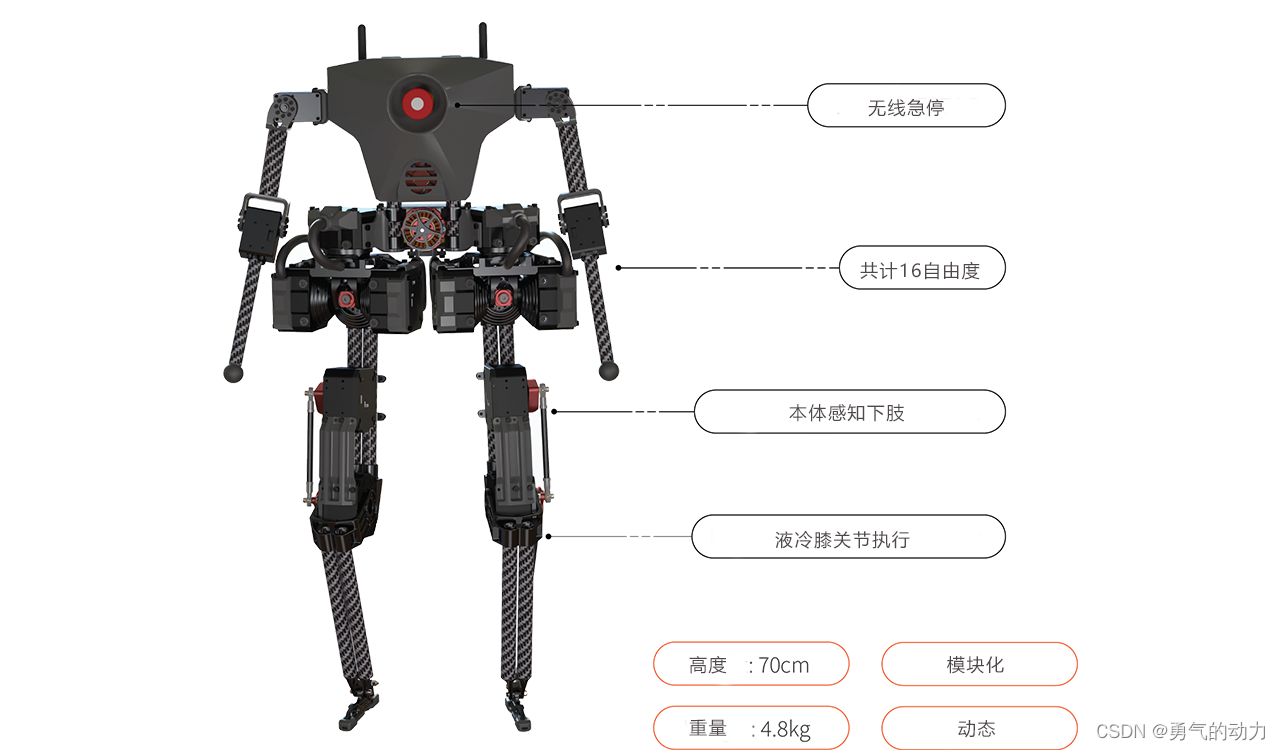
机器人:Bcuce机器人介绍
- 单腿5个自由度、单臂3个自由度、全身共16个自由度
- 仅重4.8kg、身高70cm、3000mAh电池
- 独立的无线急停装置
- 经由无线局域网通过SSH控制或蓝牙控制
- 腿部驱动器每个仅重250g、爆发力矩达8Nm
官方的github地址https://github.com/Westwood-Robotics
Bruce机器人Gazebo中仿真代码部署
docker中安装gazebo,并部署Bruce机器人仿真和代码
# docker中获取ubuntu系统,用jammy。
docker pull ubuntu:jammy-20240227
docker run -it \--env="DISPLAY=$DISPLAY" \--gpus all \--workdir="/home/zeven/bruce" \--volume="/home/zeven/bruce/BRUCE-OP:/home/zeven/bruce/BRUCE-OP" \--volume="/etc/apt/hosts" \--env="QT_X11_NO_MITSHM=1" \--volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" \ubuntu:jammy-20240227rqt
export containerId=$(docker ps -l -q)
安装必要的包
apt clean# 2. 更新 apt 的缓存
apt-get update -y# 3. 安装 ca-certificates
apt-get install -y ca-certificatesBVC # 4. (可选) 安装任意一款 文本编辑器,以方便接下来修改配置文件
# Linux 常用文本编辑器:wim、nano、emacs
apt-get install <上述任意一个文本编辑器名>
# 如安装 vim
apt-get install vim
apt-get install curl
apt-get install pip
安装gazebo、docker显示相关和必要环境包
# 在宿主机执行
sudo apt-get install x11-xserver-utils
xhost +
#docker中执行
# 安装gazebo
echo "185.199.108.133 raw.githubusercontent.com" >> /etc/hosts
curl -sSL http://get.gazebosim.org | sh
# 测试安装是否正常
gezebo
# 安装环境依赖
pip install numpy pyserial termcolor matplotlib scipy osqp numba dynamixel-sdk posix_ipc pygame
然后依据
Bruce真机代码部署
电机驱动pyBear sdk安装
#获取代码
git clone git@github.com:Westwood-Robotics/PyBEAR.git
sudo cp 00-WestwoodRobotics.rules /etc/udev/rules.d
sudo udevadm control --reload
运行完后还是会出现权限不足问题,通过写udev规则解决。
下面是如何为这个设备编写udev规则的步骤:
打开终端: 在你的Linux系统中打开终端。
创建udev规则文件: 使用文本编辑器创建一个新的udev规则文件。例如,使用nano编辑器:
sudo nano /etc/udev/rules.d/99-usb2bear.rules
这里的文件名 70-ft232h.rules 是你创建的udev规则文件,文件名前的数字 70 表示加载顺序,你可以根据需要选择不同的数字。
编写udev规则: 在打开的编辑器中,输入以下udev规则:
# bear
SUBSYSTEM=="tty", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6014", MODE="0666", GROUP="dialout"
# Dynamixel
SUBSYSTEM=="tty", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6001", MODE="0666", GROUP="dialout"
# imu
SUBSYSTEM=="tty", ATTRS{idVendor}=="2e8a", ATTRS{idProduct}=="000a", MODE="0666", GROUP="dialout"
这条规则表示,当udev检测到一个属于tty子系统,且具有特定供应商ID和产品ID的设备时,将该设备的文件模式设置为 0666(允许所有用户读写),并将该设备归属于 dialout 用户组。
保存并关闭文件: 如果你使用的是 nano,可以通过按 Ctrl+O 保存文件,然后按 Ctrl+X 退出编辑器。
重新加载udev规则: 保存规则文件后,需要重新加载udev规则,以使新规则生效:
sudo udevadm control --reload-rules
sudo udevadm trigger
将你的计算机权限修改为允许PyBEAR访问串行端口。
sudo chown -R your_username /usr/local
sudo usermod -a -G dialout your_username
CD到 PyBEAR/ 目录 安装相关包
pip3 install .
然后根据RM步骤进行
先编译包
cd BRUCE/BRUCE-OP
python3 -m Library.ROBOT_MODEL.BRUCE_DYNAMICS_AOT
python3 -m Library.ROBOT_MODEL.BRUCE_KINEMATICS_AOT
python3 -m Library.STATE_ESTIMATION.BRUCE_ORIENTATION_AOT
python3 -m Library.STATE_ESTIMATION.BRUCE_ESTIMATION_CF_AOT
python3 -m Library.STATE_ESTIMATION.BRUCE_ESTIMATION_KF_AOT
机器人控制中文件BRUCE_SERIAL_PORT 是相关通讯接口号需要更改Settings/BRUCE_macros.py (line 272-283)代码匹配BRUCE_SERIAL_PORT位置
这篇关于西木科技Westwood-Robotics人型机器人Bruce配置和真机配置的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







