机器人专题

利用Python编写一个简单的聊天机器人
《利用Python编写一个简单的聊天机器人》这篇文章主要为大家详细介绍了如何利用Python编写一个简单的聊天机器人,文中的示例代码讲解详细,感兴趣的小伙伴可以跟随小编一起学习一下... 使用 python 编写一个简单的聊天机器人可以从最基础的逻辑开始,然后逐步加入更复杂的功能。这里我们将先实现一个简单的

Python基于火山引擎豆包大模型搭建QQ机器人详细教程(2024年最新)
《Python基于火山引擎豆包大模型搭建QQ机器人详细教程(2024年最新)》:本文主要介绍Python基于火山引擎豆包大模型搭建QQ机器人详细的相关资料,包括开通模型、配置APIKEY鉴权和SD... 目录豆包大模型概述开通模型付费安装 SDK 环境配置 API KEY 鉴权Ark 模型接口Prompt

基于树梅派的视频监控机器人Verybot
最近这段时间做了一个基于树梅派 ( raspberry pi ) 的视频监控机器人平台 Verybot ,现在打算把这个机器人的一些图片、视频、设计思路进行公开,并且希望跟大家一起研究相关的各种问题,下面是两张机器人的照片: 图片1: 图片2 这个平台的基本组成是:

【机器人工具箱Robotics Toolbox开发笔记(二十)】机器人工具箱SerialLink I类函数参数说明
机器人工具箱中的SerialLink表示串联机器人型机器人的具体类。该类使用D-H参数描述,每个关节一组。SerialLink I类包含的参数如表1所示。 表1 SerialLink I类参数 参 数 意 义 参 数 意 义 plot 显示机器人的图形表示 jacobn 工具坐标系中的雅可比矩阵 plot3D 显示机器人3D图形模型 Jacob_dot

机器人助力上下料搬运,加速仓库转运自动化
近年来,国内制造业领域掀起了一股智能化改造的浪潮,众多工厂纷纷采纳富唯智能提供的先进物流解决方案,这一举措显著优化了生产流程,实现了生产效率的飞跃式增长。得益于这些成功案例,某信息技术服务企业在工厂智能物流建设的进程中,也选择了与富唯智能合作。 为了应对日益增长的物料搬运需求,匹配成品输出节拍,该公司引入了富唯智能复合机器人AMR与搬运机器人AGV,实现了仓库成品搬运自动化,大幅减少人工

【最新华为OD机试E卷-支持在线评测】机器人活动区域(100分)多语言题解-(Python/C/JavaScript/Java/Cpp)
🍭 大家好这里是春秋招笔试突围 ,一枚热爱算法的程序员 ✨ 本系列打算持续跟新华为OD-E/D卷的三语言AC题解 💻 ACM金牌🏅️团队| 多次AK大厂笔试 | 编程一对一辅导 👏 感谢大家的订阅➕ 和 喜欢💗 🍿 最新华为OD机试D卷目录,全、新、准,题目覆盖率达 95% 以上,支持题目在线评测,专栏文章质量平均 94 分 最新华为OD机试目录: https://blog.

Dify.ai:部署自己的 AI 应用、知识库机器人,简单易用
Dify.ai:部署自己的 AI 应用、知识库机器人,简单易用 今天,来分享下 Dify.AI 这个产品,一句话介绍:可供普通人简单易用的部署生成出一个 AI 应用。这是一种使用人工智能技术来帮助团队开发和运营 AI 应用的工具。 什么是 Dify.ai Dify.ai 是一个易于使用的 LLMOps 平台,旨在帮助更多的人创建可持续的、AI 原生的应用。通过对各种应用类型的可视化编排,Di

机器人可能会在月球上提供帮助
登月是我们这个时代最具标志性的事件之一,这可能还算轻描淡写了:这是我们迄今为止在物理上探索得最远的一次。我听过一些当时的老广播,它们可以让你想象出这次航行的重要性。 现在,研究人员表示,我们可能很快就能重返月球,甚至可能很快就会有人类任务前往火星。 火星。艺术家:NASA 这次会有什么不同呢? 有一点是确定的:机器人将大力协助—— 非常多。 在麻省理工学院,我们的一些团队正在开发突破性的

【人工智能/机器学习/机器人】数学基础-学习笔记
函数 奇偶性: 偶函数: f ( − x ) = f ( x ) f(-x)=f(x) f(−x)=f(x) y轴对称 f ( x ) = x 2 f(x)=x^2 f(x)=x2 f ( − x ) = ( − x ) 2 = x 2 = f ( x ) f(-x)=(-x)^2=x^2=f(x) f(−x)=(−x)2=x2=f(x) 奇函数: f ( − x )

全国机器人大赛 Robocon 常州工学院团队首战国三
全国机器人大赛 Robocon 常州工学院团队首战国三 通宵7天7夜,常州工学院RC团队,首次闯入全国机器人大赛国赛,并成功得分! 不同于老牌强队,常州工学院(下面用"常工"代替)的这只队伍,大多数成员由大一组成,核心岗位由一些大二各个专业基础最为扎实的学生担任。 7月7日,19:26分。卡在报道的最后10分钟,由在团队项管和电控成功领队签到,光电Robot成为最近几年唯一一只冲入Roboc

论文速读|利用局部性提高机器人操作的样本效率
项目地址:SGRv2 本文提出了SGRv2,一个系统的视觉运动政策框架,通过整合动作局部性提高了样本效率。在多个模拟和真实世界环境中进行的广泛评估表明,SGRv2在数据有限的情况下表现出色,并且在不同的控制模式下保持一致的性能。未来的工作可以进一步探索将扩散政策与局部性框架结合,以增强在现实世界中的性能,并扩展泛化测试的范围。 论文初读:
用python fastapi写一个http接口,使ros2机器人开始slam toolbox建图
如果你想使用Python的FastAPI框架编写一个HTTP接口,以便通过接口启动ROS 2机器人的SLAM Toolbox建图,可以按照以下方式进行: 首先,确保你已经安装了fastapi和uvicorn库。你可以使用以下命令进行安装: pip install fastapi uvicorn 接下来,创建一个Python文件(例如app.py),并将以下代码添加到文件中: import
AI模型:追求全能还是专精?-- 之5 “机器人”最终会成为“人类”的主导者吗?--答案是:不会!
Q1、先回顾一下:我们正在设计的是 一个变形机器人(变形金刚Transformers)。它是作为三种机器人(移动机器人Robot、代理机器人Agent和人形机器人Android )的共同原型(可以视为“祖先”--上述三者的祖传代码)来设计的。 Transformers原型( Anestor) 中 为支持产生规则的反向应用规定了 生成任何一种语言的产生规则的三个元级推理技术 等价超因子(=)、特化超

【数据应用案例】知乎瓦力机器人识别“阴阳怪气”回复
案例来源:@AI科技评论 案例地址:https://mp.weixin.qq.com/s/eVbRkwQu0BQKTblKMZAsfA 1. 目标:知乎中有“你可真是棒棒的”、“你开心就好”等评论,识别并过滤这些评论有助于提高社区讨论质量 2. 数据获取: 1)根据“举报”和“踩”,得到“阴阳怪气”样本 2)通过同义词替换,扩大样本量 3)根据提取的

C1-2 ABB二次SDK开发——手把手教登录对应的机器人控制器(图片引导操作)登录机器人控制器和刷新机器人列表
1.完成配置后我们开始进行操作 C1-1 ABB二次SDK开发——C#Window窗体-环境配置(带ABB二次开发SDK资源包)-CSDN博客文章浏览阅读95次。3.记住路径,右键C#引用,然后导入ABB.Robotics.Controllers.PC.dll。2.安装资源文件PCABB二次开发的SDK,并打开安装路径。1.新建VSC#的windowfrom项目。4.在框架代码主界面代码中添加。

利用智能外呼机器人,重塑营销版图
人工智能技术正以惊人的速度发展,并深刻改变着各行各业的运营模式,智能外呼机器人作为其中一个颇具潜力的应用,正在逐步改变传统的客户服务和营销方式。本文将深入探讨智能外呼机器人的定义、功能、优势、应用场景以及未来的发展方向,帮助企业全面理解这一创新技术。 一、智能外呼机器人是什么? 智能外呼机器人是一种结合了自然语言处理(NLP)、语音识别、语音合成以及机器学习等技术的人工智能产品。与传统

IMU助力JAXA空间站机器人
近日,日本宇宙航空研究开发机构(JAXA)宣布,在国际空间站(ISS)实验舱“希望号”(Kibo)上部署的一款移动摄像机器人将采用Epson M-G370系列惯性测量单元(IMU)。IMU是一种能够检测物体运动状态的装置,通过测量加速度和角速度来确定物体的空间位置和姿态。这种技术对于在缺乏固定参照物的空间环境中尤为重要。 自2023年6月以来,“内部球形相机2号”(Internal Ball C

论文速读|重新审视奖励设计与评估:用于强健人型机器人站立与行走控制的方法
论文地址:https://arxiv.org/pdf/2404.19173 这篇论文为类人机器人站立和行走(SaW)控制器的持续可衡量改进奠定了基础。通过引入一套定量实际基准测试方法,作者展示了现有控制器的优缺点,并通过基准测试指导新控制器的训练,最终实现了增强的控制器,成功处理了所有测试的扰动。结果表明,当前的RL控制器在能量效率和仿真到现实差距方面存在局限性。未来的工作应专注于在不牺牲

可交互、会学习、自成长机器人——李德毅院士
在以“农业无人农场”为主题的中国工程科技论坛上,中国工程院院士、欧亚科学院院士、中国人工智能学会和中国指挥与控制学会名誉理事长,中科原动力首席科学家李德毅院士应邀做题为《机器具身交互智能》的演讲。李德毅院士表示,智能机器不但把人从繁重的、重复性劳动中解脱出来,更好地符合相应工作岗位规范化要求,更重要的是可以暴力计算,人机交互协同创新。他认为,智能农机的硬核已经跃过了算力、算法和数据阶段,可交互、会

智能巡检机器人创新设计的关键技术
智能巡检机器人是一种用于工业领域的自动化设备,能够在无人干预的情况下自主完成设备巡检、数据采集及故障预警。随着物联网、人工智能技术的快速发展,智能巡检机器人的设计和功能得到了不断的升级。然而,为了应对复杂的应用环境和不断变化的需求,智能巡检机器人在设计中必须采用一系列关键技术创新,确保其具备高效、灵活、可靠的性能。 自主导航技术 1. 基于激光雷达的导航 自主
【智能制造-30】机器人飞车现象
什么是机器人飞车? 机器人飞车是指机器人在运行过程中出现失控加速的异常现象。表现形式如下: 速度异常升高 正常情况下,机器人的运动速度是由其控制系统根据预设的程序和指令进行精确控制的。但在飞车状态下,机器人的电机转速会突然大幅增加,导致整体运动速度远超正常范围。例如,一个工业机器人在执行装配任务时,原本以稳定的速度进行操作,突然之间速度急剧上升,可能对周围的设备、工件以及操作人员造成严重的安全

【机器人工具箱Robotics Toolbox开发笔记(二)】Matlab中机器人工具箱的下载与安装
Matlab机器人工具箱(Robotics Toolbox)可从Peter Corke教授提供的网站上免费下载。网址为:http://www.petercorke.com/Robotics_Toolbox.html。 图1 网站所提供的机器人工具箱版本 在Downloading the Toolbox栏目中单击here按钮进入下载页面,然后在该页面中填写国家、组织和身份等信息,进入机器人工

只需要6行代码,就可以开发一个微信机器人
近年来,随着人工智能技术的快速发展,聊天机器人在各个领域得到了广泛的应用。在社交媒体中,自动回复成为了一个流行的功能,让用户可以方便地与机器人进行互动。gewe框架,一个开源的微信聊天机器人框架,实现微信自动回复功能。 请求参数 Header 参数 export interface ApifoxModel {"X-GEWE-TOKEN": string;[property: stri

论文速读|基于手臂约束的轮腿机器人运动操控课程学习
项目地址:Arm-Constrained Curriculum Learning for Loco-Manipulation of the Wheel-Legged Robot 本文提出了一种用于轮腿机器人局部操控的强化学习框架,使它们能够在高度动态的情况下执行一系列复杂的操作任务。通过引入臂约束网络和奖励感知课程学习方法,解决了引入机械臂带来的稳定性、安全性和效率挑战。仿真和真实机器人实验

1.初识ChatGPT:AI聊天机器人的革命(1/10)
引言 在当今的数字化世界中,人工智能(AI)正以其独特的方式重塑我们的生活和工作。其中,AI聊天机器人作为人机交互的前沿技术,已经成为企业与客户沟通、提供个性化服务的重要工具。这些机器人通过模拟人类的对话方式,使得机器能够以一种更加自然和直观的方式与人类交流。随着技术的不断进步,AI聊天机器人的功能也在不断扩展,它们不仅能够处理简单的查询,还能够进行复杂的对话,提供决策支持,甚至参与创造性工作。
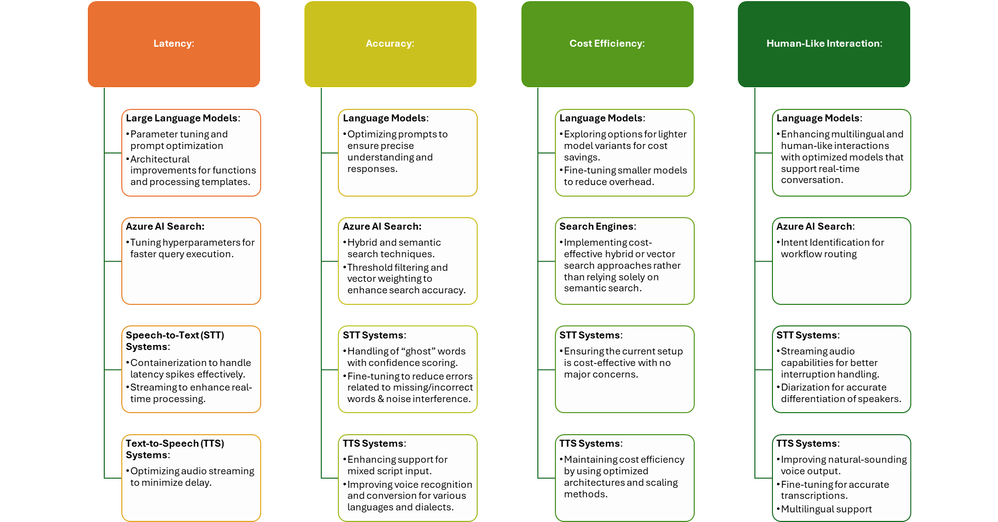
AI语音机器人:通过 Azure Speech 实现类人类的交互
语音对话的重要性 在竞争日益激烈的客户互动领域,人工智能语音对话正成为重中之重。随着数字参与者的崛起,组织认识到语音机器人的强大力量,它是一种自然而直观的沟通方式,可以提供类似人类的体验,深度吸引用户,并让他们从竞争对手中脱颖而出。无缝客户服务、个性化协助和即时信息访问的需求推动了对高质量语音交互的需求不断增长。此外,随着公司努力保留和扩大收入,跨越语言障碍接触更多样化的客户群变得至关重要,这使