本文主要是介绍《Modern Robotics》阅读笔记6——前向运动学,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
《Modern Robotics》阅读笔记6——前向运动学
前向运动学(Forward Kinematics)是《Modern Robotics》一书的第三章,这章主要介绍的内容就是如何基于旋量理论使用PoE(Product of Exponentials)形式求解机器人的前向运动学。有了之前对于旋量理论的了解,这一章的内容非常简单。
前向运动学:描述的是从关节角(关节平移)到机器人末端位姿的映射关系。也就是从部分运动映射到整体运动的关系。
接下来,就以两个例子来介绍前向运动学的求解过程。第一个例子,旋量是表示在固定系{s}下的。第二个例子,旋量表示在末端坐标系{b}下。
例1:旋量轴表达在固定系下
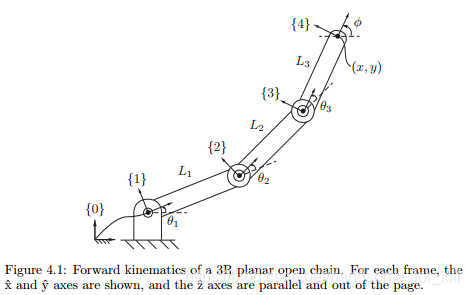
这是一个具有3个旋转关节的在平面范围内运动的机械臂。图中,我们定义了坐标系{0},{1},{2},{3},{4}。其中,x轴沿着连杆方向,y轴与连杆方向垂直,z轴与转轴方向共线。
求解该机械臂的前向运动学,也就是求解每个关节角度 [ θ 1 , θ 2 , θ 3 ] [\theta_1,\theta_2,\theta_3] [θ1,θ2,θ3]与末端坐标系{4}的关系。
D-H方法
对于这个问题,首先,我们可以用经典的D-H方法做个示范。
T 04 = T 01 T 12 T 23 T 34 T_{04}=T_{01} T_{12} T_{23} T_{34} T04=T01T12T23T34
其中:
T 01 = [ cos θ 1 − sin θ 1 0 0 sin θ 1 cos θ 1 0 0 0 0 1 0 0 0 0 1 ] , T 12 = [ cos θ 2 − sin θ 2 0 L 1 sin θ 2 cos θ 2 0 0 0 0 1 0 0 0 0 1 ] T_{01}=\left[\begin{array}{cccc}{\cos \theta_{1}} & {-\sin \theta_{1}} & {0} & {0} \\ {\sin \theta_{1}} & {\cos \theta_{1}} & {0} & {0} \\ {0} & {0} & {1} & {0} \\ {0} & {0} & {0} & {1}\end{array}\right], \quad T_{12}=\left[\begin{array}{ccc}{\cos \theta_{2}} & {-\sin \theta_{2}} & {0} & {L_{1}} \\ {\sin \theta_{2}} & {\cos \theta_{2}} & {0} & {0} \\ {0} & {0} & {1} & {0} \\ {0} & {0} & {0} & {1}\end{array}\right] T01=⎣⎢⎢⎡cosθ1sinθ100−sinθ1cosθ10000100001⎦⎥⎥⎤,T12=⎣⎢⎢⎡cosθ2sinθ200−sinθ2cosθ2000010L1001⎦⎥⎥⎤
T 23 = [ cos θ 3 − sin θ 3 0 L 2 sin θ 3 cos θ 3 0 0 0 0 1 0 0 0 0 1 ] , T 34 = [ 1 0 0 L 3 0 1 0 0 0 0 1 0 0 0 0 1 ] T_{23}=\left[\begin{array}{ccc}{\cos \theta_{3}} & {-\sin \theta_{3}} & {0} & {L_{2}} \\ {\sin \theta_{3}} & {\cos \theta_{3}} & {0} & {0} \\ {0} & {0} & {1} & {0} \\ {0} & {0} & {0} & {1}\end{array}\right], \quad T_{34}=\left[\begin{array}{cccc}{1} & {0} & {0} & {L_{3}} \\ {0} & {1} & {0} & {0} \\ {0} & {0} & {1} & {0} \\ {0} & {0} & {0} & {1}\end{array}\right] T23=⎣⎢⎢⎡cosθ3sinθ300−sinθ3cosθ3000010L2001⎦⎥⎥⎤,T34=⎣⎢⎢⎡100001000010L3001⎦⎥⎥⎤
可以看到, T 04 T_{04} T04是一个与 [ θ 1 , θ 2 , θ 3 ] [\theta_1,\theta_2,\theta_3] [θ1,θ2,θ3]有关的函数。
基于旋量理论的PoE方法
基于旋量的PoE方法,最大的特点就是无需对于每一根连杆建立复杂的坐标系,只需要建立固定坐标系和末端坐标系就可以对运动进行表示了。下面对这个方法进行介绍:
第一步,我们需要定义机械臂的初始位置,这里将 [ θ 1 , θ 2 , θ 3 ] [\theta_1,\theta_2,\theta_3] [θ1,θ2,θ3]全为0,作为机械臂的初始姿态,也就相当于将图中的机械臂完全放平。
第二步,我们定义末端坐标系和固定坐标系,并且计算初始姿态下末端坐标系相对于固定坐标系的位姿M。这里末端坐标系就是{4}系,固定坐标系就是{1}系。初始姿态下,有:
M = [ 1 0 0 L 1 + L 2 + L 3 0 1 0 0 0 0 1 0 0 0 0 1 ] M=\left[\begin{array}{cccc}{1} & {0} & {0} & {L_{1}+L_{2}+L_{3}} \\ {0} & {1} & {0} & {0} \\ {0} & {0} & {1} & {0} \\ {0} & {0} & {0} & {1}\end{array}\right] M=⎣⎢⎢⎡100001000010L1+L2+L3001⎦⎥⎥⎤
第三步,计算旋量轴。需要注意,这里计算的旋量轴是表示在{1}系固定系下的。因此,我们从3号关节开始。假设 θ 1 \theta_1 θ1和 θ 2 \theta_2 θ2都等于0,对应于3号关节,其旋量轴的表示为:
S 3 = [ ω 3 v 3 ] = [ 0 0 1 0 − ( L 1 + L 2 ) 0 ] \mathcal{S}_{3}=\left[\begin{array}{c}{\omega_{3}} \\ {v_{3}}\end{array}\right]=\left[\begin{array}{c}{0} \\ {0} \\ {1} \\ {0} \\ {-\left(L_{1}+L_{2}\right)} \\ {0}\end{array}\right] S3=[ω3v3]=⎣⎢⎢⎢⎢⎢⎢⎡0010−(L1+L2)0⎦⎥⎥⎥⎥⎥⎥⎤
这是怎么来的呢?
前文说到,旋量轴的六个量中,前三个量定义了旋转轴矢量的方向,而后三个量和前三个量则共同定义了旋转轴的位置。另外,旋量轴也可以理解为,固定系的原点在当前的刚体运动下的角速度和线速度。(这里主要说的是旋转关节,移动关节会有一些不同)
对于3号关节,旋转轴的方向显然指向z轴,另外我们定义角速度的模为1 rad/s,结合二者,所以 ω 3 = [ 0 , 0 , 1 ] T \omega_{3}=[0,0,1]^T ω3=[0,0,1]T。对于固定系{1}的原点而言,当机械臂末端绕3号关节以 ω 3 = [ 0 , 0 , 1 ] T \omega_{3}=[0,0,1]^T ω3=[0,0,1]T的角速度运动时,该点产生的线速度为 v 3 = [ 0 , − ( L 1 + L 2 ) , 0 ] T v_{3}=[0,-\left(L_{1}+L_{2}\right),0]^T v3=[0,−(L1+L2),0]T。由此,就得到了旋量轴的表示。
于是,根据前文中介绍的刚体运动知识,我们知道当 θ 1 = 0 \theta_1=0 θ1=0和 θ 2 = 0 \theta_2=0 θ2=0时,有:
T 04 = e [ S 3 ] θ 3 M ( for θ 1 = θ 2 = 0 ) T_{04}=e^{\left[S_{3}\right] \theta_{3}} M\left(\text { for } \theta_{1}=\theta_{2}=0\right) T04=e[S3]θ3M( for θ1=θ2=0)
值得注意,这里指数表达式乘在了M的左边。(左乘是因为旋量轴表达在固定系{1}系下!)
其中:
[ S 3 ] = [ [ ω ] v 0 0 ] = [ 0 − 1 0 0 1 0 0 − ( L 1 + L 2 ) 0 0 0 0 0 0 0 0 ] \left[\mathcal{S}_{3}\right]=\left[\begin{array}{cc}{[\omega]} & {v} \\ {0} & {0}\end{array}\right]=\left[\begin{array}{rrrr}{0} & {-1} & {0} & {0} \\ {1} & {0} & {0} & {-\left(L_{1}+L_{2}\right)} \\ {0} & {0} & {0} & {0} \\ {0} & {0} & {0} & {0}\end{array}\right] [S3]=[[ω]0v0]=⎣⎢⎢⎡0100−100000000−(L1+L2)00⎦⎥⎥⎤
以此类推,我们计算2号关节和1号关节的旋量轴,如下:
S 2 = [ ω 2 v 2 ] = [ 0 0 1 0 − L 1 0 ] , S 1 = [ ω 1 v 1 ] = [ 0 0 1 0 0 0 ] \mathcal{S}_{2}=\left[\begin{array}{c}{\omega_{2}} \\ {v_{2}}\end{array}\right]=\left[\begin{array}{c}{0} \\ {0} \\ {1} \\ {0} \\ {-L_{1}} \\ {0}\end{array}\right], \mathcal{S}_{1}=\left[\begin{array}{c}{\omega_{1}} \\ {v_{1}}\end{array}\right]=\left[\begin{array}{c}{0} \\ {0} \\ {1} \\ {0} \\ {0} \\ {0}\end{array}\right] S2=[ω2v2]=⎣⎢⎢⎢⎢⎢⎢⎡0010−L10⎦⎥⎥⎥⎥⎥⎥⎤,S1=[ω1v1]=⎣⎢⎢⎢⎢⎢⎢⎡001000⎦⎥⎥⎥⎥⎥⎥⎤
有:
T 04 = e [ S 1 ] θ 1 e [ S 2 ] θ 2 e [ S 3 ] θ 3 M T_{04}=e^{\left[\mathcal{S}_{1}\right] \theta_{1}} e^{\left[\mathcal{S}_{2}\right] \theta_{2}} e^{\left[\mathcal{S}_{3}\right] \theta_{3}} M T04=e[S1]θ1e[S2]θ2e[S3]θ3M
读者可以验证,PoE方法计算得到 T 04 T_{04} T04与D-H方法得到的完全一样。
值得注意的是,在这里我们是从3号关节一直算到1号关节,为什么要这么做呢?顺序倒过来可以吗?
答案是否定的,必须从3号关节算到1号关节。由于旋量轴是定义在固定系{1}系下的,假如我们首先旋转1号关节,那么2号关节和3号关节的也会运动,这样2号关节和3号关节的旋量轴的表达就与1号关节的角度有关了,这是旋量轴就不好求了,需要建立坐标系,这样也就违背了我们使用旋量计算运动学的初衷。
而当我们先计算3号关节,然后是2号,最后是1号,这样就不会有这种麻烦。因为旋转3号关节,2号和1号相对于固定系都没有任何运动,旋量轴非常直观。
例2:旋量轴表达在末端系下
还是上文中的同一个例子,现在我们把旋量轴表达在末端系下。
依然是定义初始位置,以及末端系在固定系下的表达M:
M = [ 1 0 0 L 1 + L 2 + L 3 0 1 0 0 0 0 1 0 0 0 0 1 ] M=\left[\begin{array}{cccc}{1} & {0} & {0} & {L_{1}+L_{2}+L_{3}} \\ {0} & {1} & {0} & {0} \\ {0} & {0} & {1} & {0} \\ {0} & {0} & {0} & {1}\end{array}\right] M=⎣⎢⎢⎡100001000010L1+L2+L3001⎦⎥⎥⎤
把旋量轴表达在末端系下,那么我们的计算顺序需要改变成:首先1号关节,其次2号关节,最后3号关节。
B 1 = [ ω 1 v 1 ] = [ 0 0 1 0 L 1 + L 2 + L 3 0 ] , B 2 = [ ω 2 v 2 ] = [ 0 0 1 0 L 2 + L 3 0 ] , B 3 = [ ω 3 v 3 ] = [ 0 0 1 0 L 3 0 ] \mathcal{B}_{1}=\left[\begin{array}{c}{\omega_{1}} \\ {v_{1}}\end{array}\right]=\left[\begin{array}{c}{0} \\ {0} \\ {1} \\ {0} \\ {L_{1}+L_{2}+L_{3}} \\ {0}\end{array}\right], \mathcal{B}_{2}=\left[\begin{array}{c}{\omega_{2}} \\ {v_{2}}\end{array}\right]=\left[\begin{array}{c}{0} \\ {0} \\ {1} \\ {0} \\ {L_{2}+L_{3}} \\ {0}\end{array}\right], \mathcal{B}_{3}=\left[\begin{array}{c}{\omega_{3}} \\ {v_{3}}\end{array}\right]=\left[\begin{array}{c}{0} \\ {0} \\ {1} \\ {0} \\ {L_3} \\ {0}\end{array}\right] B1=[ω1v1]=⎣⎢⎢⎢⎢⎢⎢⎡0010L1+L2+L30⎦⎥⎥⎥⎥⎥⎥⎤,B2=[ω2v2]=⎣⎢⎢⎢⎢⎢⎢⎡0010L2+L30⎦⎥⎥⎥⎥⎥⎥⎤,B3=[ω3v3]=⎣⎢⎢⎢⎢⎢⎢⎡0010L30⎦⎥⎥⎥⎥⎥⎥⎤
最终有:
T 04 = M e [ B 1 ] θ 1 e [ B 2 ] θ 2 e [ B 3 ] θ 3 T_{04}=M e^{\left[\mathcal{B}_{1}\right] \theta_{1}} e^{\left[\mathcal{B}_{2}\right] \theta_{2}} e^{\left[\mathcal{B}_{3}\right] \theta_{3}} T04=Me[B1]θ1e[B2]θ2e[B3]θ3
过程都与例1类似,只不过左乘换做了右乘,这也是由于旋量轴表达在末端系下的原因。
总结
前向运动学这一章内容,总体来说比较简单。大家需要掌握的就是如何计算旋量轴,然后需要特别注意旋量轴表达在哪一个坐标系下。这就足够了。
这篇关于《Modern Robotics》阅读笔记6——前向运动学的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








