运动学专题

2024数学建模国赛A题详细思路:基于空间几何运动学和优化模型matlab求解
2024数学建模国赛A题“板凳龙”闹元宵 2024高教社杯数学建模竞赛A题B题C题D题E题完整成品文章和全部问题的解题代码完整版本更新如下:https://www.yuque.com/u42168770/qv6z0d/rytbc1nelty1mu4o % 定义常量L_head = 3.41; % 龙头长度(米)L_body = 2.20; % 龙身长度(米)spiral_pitch =
![[3.2] 机器人连杆变换和运动学方程](https://i-blog.csdnimg.cn/direct/81217c6b578c44bdae31d252d0541f96.png)
[3.2] 机器人连杆变换和运动学方程
本节首先推导相邻两连杆坐标系之间的变换矩阵,然后将这些变换矩阵依次相乘,得到操作臂的运动学方程。该方程表示末端连杆相对于基座的位姿关系,是各关节变量的函数。 连杆坐标系{i}与{i-1}通过四个参数、、、联系起来,因此坐标系{i}相对于{i-1} 的齐次变换矩阵T,通常也是连

【机器人学导论】6自由度机械臂逆运动学求解—牛顿法(数值法,仅旋转关节)
我以前是机器人专业,不过学的不多,教程应该是灰色封面的《机器人学导论》。3年前学的了,软件仿真学的是ABB,上手操作是KUKA的机器人。本文是给别人解决问题的记录,写个笔记。代码是matlab的,不免费分享,但是看我的解析应该也能自己写出来。我不从事这个行业,很多东西已经模糊了。 文章目录 一、DH参数二、正向运动学三、逆向运动学3.1 逆向运动学的求解方法:3.11 解析法(Ana

机器人学——正向运动学(机械臂)
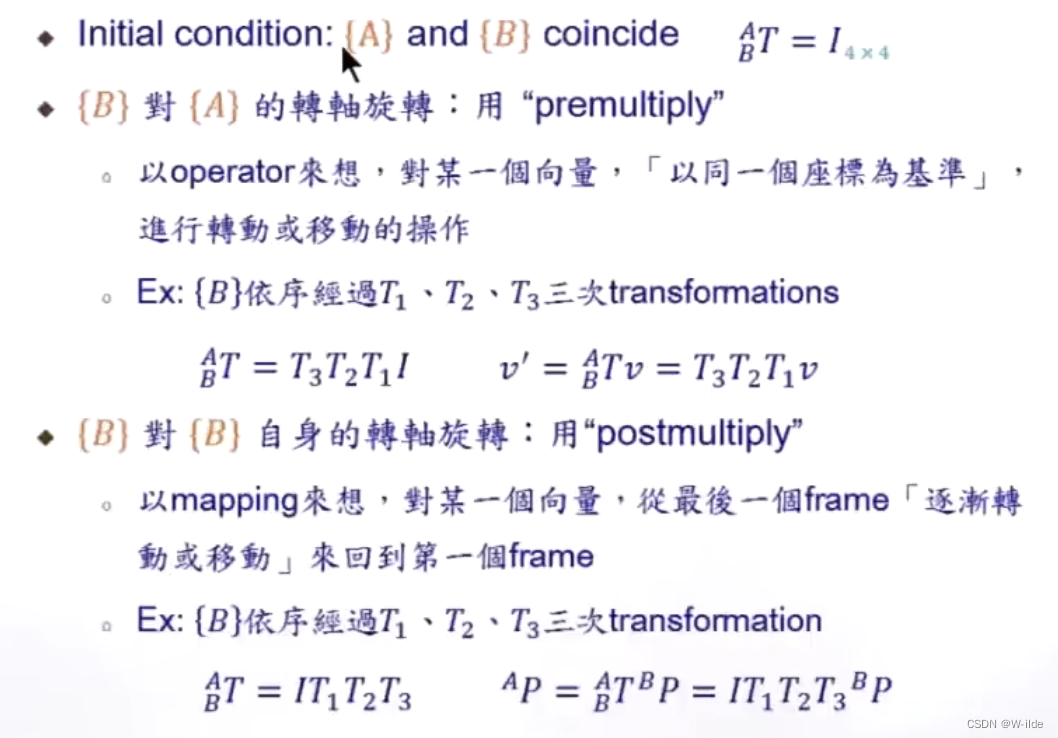
Manipulator Forward Kinematics 机械臂基础概念 Joint and Link 连杆长度、连杆夹角 连杆偏距与关节角 移动关节看距离、旋转关节看角度 如何在杆上建立坐标系 地杆(link0)坐标系的建立 末端杆件坐标系的建立 DH表达法 如何计算出两杆之间的变换矩阵? 初始状态 对Axis i-1 的z轴进行旋转

UR3机械臂正逆运动学详解及c++完整代码
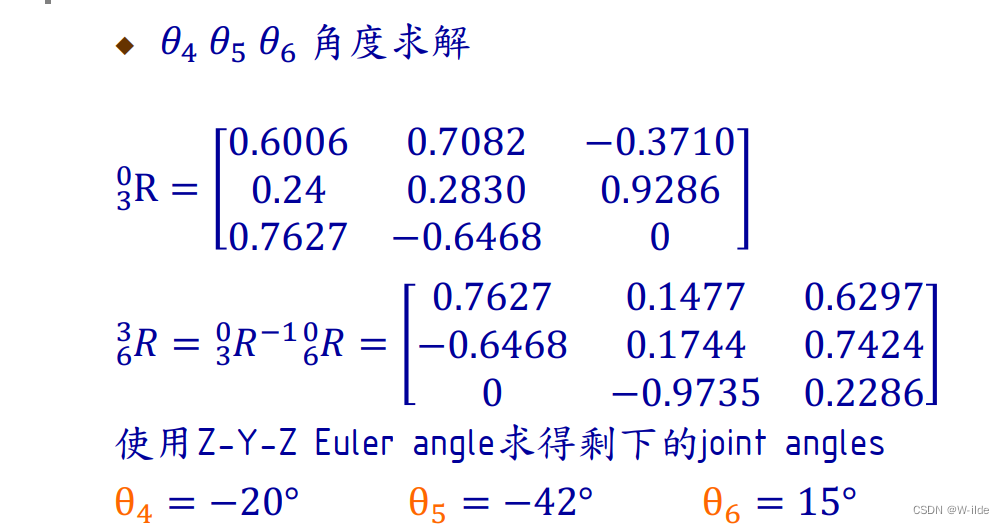
目录 D-H参数表正运动学公式推导代码测试 逆运动学准备工作求解 θ 1 \theta_{1} θ1求解 θ 5 \theta_{5} θ5求解 θ 6 \theta_{6} θ6求解 θ 2 \theta_2 θ2、 θ 3 \theta_3 θ3、 θ 4 \theta_4 θ4先求解 θ 234 \theta_{234} θ234再求解 θ 2 \theta_{2} θ2

Python | C# | MATLAB 库卡机器人微分运动学 | 欧拉-拉格朗日动力学 | 混合动力控制
🎯要点 🎯正向运动学几何矩阵,Python虚拟机器人模拟动画二连杆平面机械臂 | 🎯 逆向运动学几何矩阵,Python虚拟机器人模拟动画三连杆平面机械臂 | 🎯微分运动学数学形态,Python模拟近似结果 | 🎯欧拉-拉格朗日动力学数学形态,Python模拟机器人操纵器推导的运动方程有效性 | 🎯运动规划算法,Python虚拟机器人和摄像头模拟离线运动规划算法 | 🎯移动导航卡尔曼
四足机器人步态仿真(二)PyBullet 机械臂运动学仿真(以绘制圆形路径为例)
观前提醒:本章主要内容是通过PyBullet仿真kuka机械臂,并控制机械臂末端按照预定轨迹运动 一、什么是运动学? 运动学是物理学的一个分支,专注于物体的运动描述,包括位移、速度、加速度等,而不考虑这些运动是如何产生的(即不考虑力和质量)。运动学可以应用在很多领域,包括机械工程、机器人学、生物力学等。 在机器人学中,运动学特别指的是机器人各个部件之间的运动关系。机器人的运动学可以分为两个主要

new CCDIKSolver( OOI.kira, iks ); // 创建逆运动学求解器
demo案例 new CCDIKSolver(OOI.kira, iks); 在使用某个特定的库或框架来创建一个逆运动学(Inverse Kinematics, IK)求解器实例。逆运动学在机器人学、动画和计算机图形学等领域中非常重要,它用于根据期望的末端执行器(如机器人的手或动画角色的脚)的位置和方向来求解关节的角度。 不过,由于 CCDIKSolver、OOI.kira 和 iks 都不

人形机器人建模与控制(二) - 高级运动学和动态建模
L2: Advanced Kinematic and Dynamic Modeling 这里写目录标题 L2: Advanced Kinematic and Dynamic Modeling1. Introduction2. Kinematic Modeling运动学方程速度的雅可比矩阵雅可比矩阵的两种形式分析雅可比矩阵(Analytical Jacobian)几何雅可比矩阵(Geomet

机械臂标准DH建模及正运动学分析(以IRB4600型工业机械臂为例)
1. 前言 对于工业机械臂而言,运动学是不考虑力学特性的情况下对机械臂的几何参数与其位置、速度、加速度等运动特性的关系研究。DH建模是运动学的基础,全称为Denavit-Hartenberg建模方法,是一种广泛应用于机器人运动学中的建模技术。该方法通过在每个连杆上建立坐标系,并利用齐次坐标变换来实现连杆之间的坐标转换。通过依次变换,可以推导出末端执行器相对于基坐标系的位姿,从而建立机器人的运动学
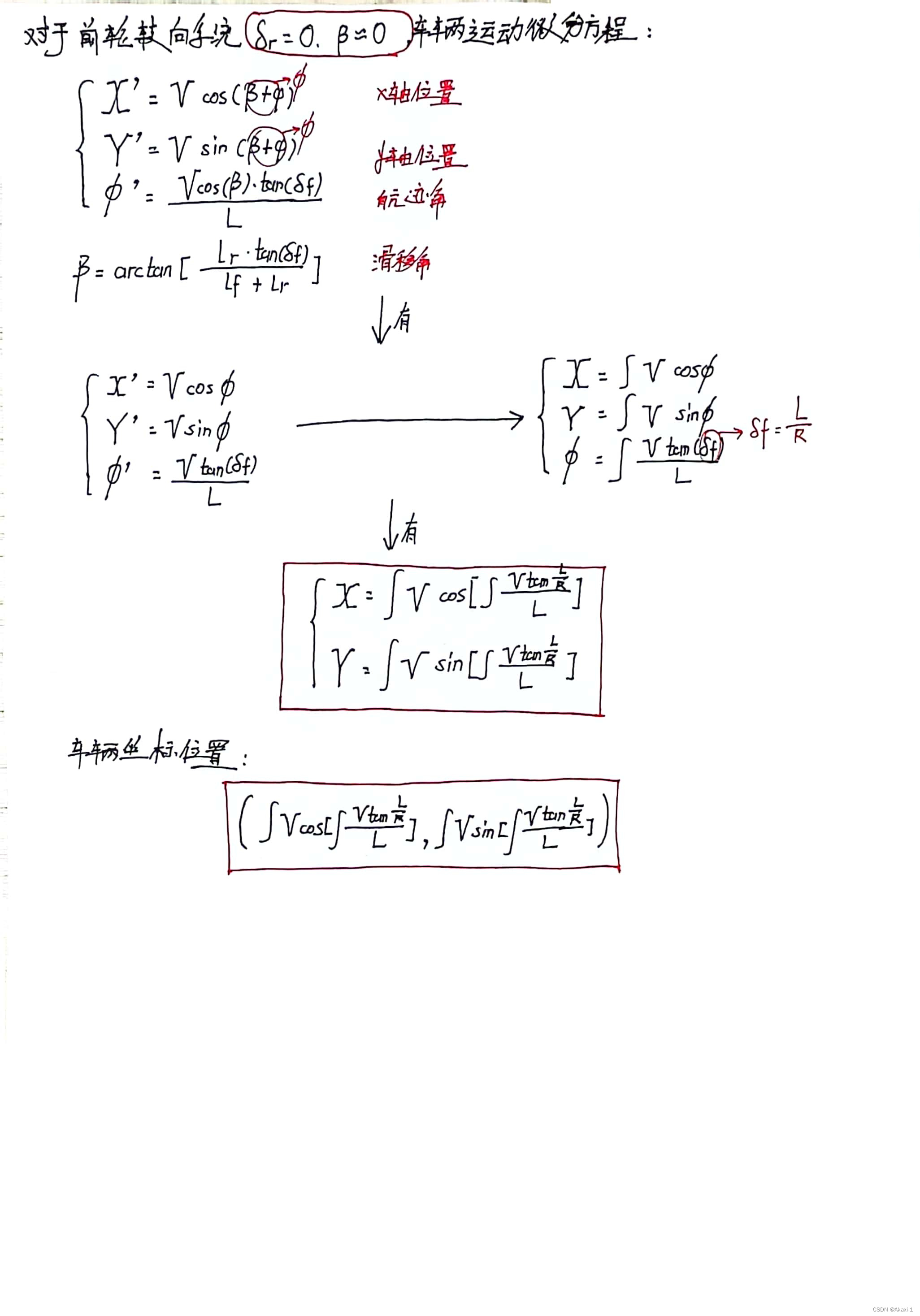
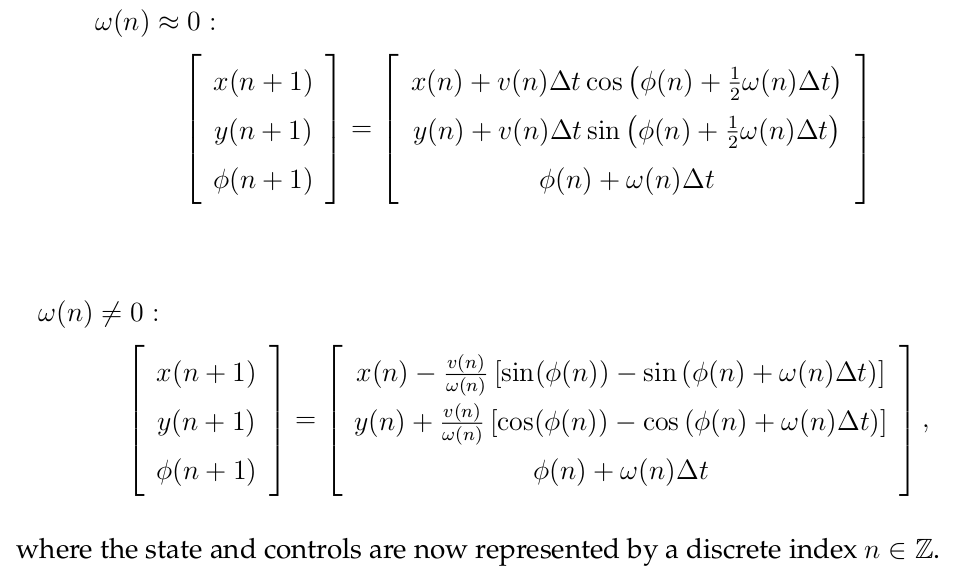
【自动驾驶车辆-运动控制】运动学模型(Kinematic Model) | 手写数学推导公式 by.Akaxi
【前言】 在设计自动驾驶规控算法时,常常需要获取车辆的各种位姿、角度等信息,要控制车辆的运动,首先要对车辆的运动建立数字化模型,模型建立的越准确,对车辆运动的描述越准确,对车辆的跟踪控制的效果就越好。除了真实反映车辆特性外,建立的模型也应该尽可能的简单易用,自行车模型(Bicycle Model)是一种常见的车辆运动学模型,以下是对车辆运动学模型的数学公式推导: -----------
四元数导数,四元数变化率运动学方程
四元数乘法 这里首先需要介绍四元数乘法,假设有两个四元数 q a , q b q_a, q_b qa,qb,如下所示: q a = q a 0 + q a 1 i + q a 2 j + q a 3 k = [ s a , v a ] T q b = q b 0 + q b 1 i + q b 2 j + q b 3 k = [ s b , v b ] T \begin{aligned}
多轴机械臂/正逆解/轨迹规划/机器人运动学/Matlab/DH法 学习记录03——机械臂运动学逆解
系列文章目录 本科毕设正在做多轴机械臂相关的内容,这里是一个学习机械臂运动学课程的相关记录。 如有任何问题,可发邮件至layraliu@foxmail.com问询。 1. 数学基础 2. 机械臂几何法与DH表示法 3. 机械臂运动学逆解 文章目录 系列文章目录一、引言1.手臂顺向运动学forward kinematics(FK)2.手臂逆向运动学inverse kinematics(IK
【运动学】基于matlab GUI倒立摆系统【含Matlab源码 1117期】
⛄一、获取代码方式 获取代码方式1: 完整代码已上传我的资源:【运动学】基于matlab GUI倒立摆系统【含Matlab源码 1117期】 点击上面蓝色字体,直接付费下载,即可。 获取代码方式2: 付费专栏Matlab物理应用(初级版) 备注: 点击上面蓝色字体付费专栏Matlab物理应用(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab物理应用(初级版),凭支
【运动学】基于matlab GUI平衡车一阶倒立摆仿真【含Matlab源码 1258期】
⛄一、获取代码方式 获取代码方式1: 完整代码已上传我的资源:【运动学】基于matlab GUI平衡车一阶倒立摆仿真【含Matlab源码 1258期】 点击上面蓝色字体,直接付费下载,即可。 获取代码方式2: 付费专栏Matlab物理应用(初级版) 备注: 点击上面蓝色字体付费专栏Matlab物理应用(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab物理应用(初级
【运动学】基于matlab EKF姿态估计【含Matlab源码 1638期】
⛄一、获取代码方式 获取代码方式1: 完整代码已上传我的资源:【运动学】基于matlab EKF姿态估计【含Matlab源码 1638期】 点击上面蓝色字体,直接付费下载,即可。 获取代码方式2: 付费专栏Matlab物理应用(初级版) 备注: 点击上面蓝色字体付费专栏Matlab物理应用(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab物理应用(初级版),凭支付

【运动学】基于matlab GUI模拟小球自由落体【含Matlab源码 1630期】
⛄一、获取代码方式 获取代码方式1: 完整代码已上传我的资源: 【运动学】基于matlab GUI模拟小球自由落体【含Matlab源码 1630期】 点击上面蓝色字体,直接付费下载,即可。 获取代码方式2: 付费专栏Matlab物理应用(初级版) 备注: 点击上面蓝色字体付费专栏Matlab物理应用(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab物理应用(初级版
多轴机械臂/正逆解/轨迹规划/机器人运动学/Matlab/DH法 学习记录01——数学基础
系列文章目录 本科毕设正在做多轴机械臂相关的内容,这里是一个学习机械臂运动学课程的相关记录。 如有任何问题,可发邮件至layraliu@foxmail.com问询。 1. 数学基础 文章目录 系列文章目录一、空间位置、姿态描述二、旋转矩阵(Rotation matrix)1.特性2.用法3.旋转矩阵与转角(旋转的前后顺序不能互换) 三、变换矩阵1.如何将移动和转动整合在一起2.trans
MATLAB从D-H参数到机械臂正运动学方程
前提 用机器人工具箱求解会方便很多,如果没有安装或不会安装,请参考 https://blog.csdn.net/AprilsHell/article/details/90722892 原理 D-H参数分别为关节扭角,连杆长度,连杆转角,连杆距离。所有都是齐次矩阵。 代码 clearN=input('请输入自由度数:');%几个轴就是输入几for i=1:Nalf(i)=input
【Matlab】非对称3-SPR并联机器人正逆运动学
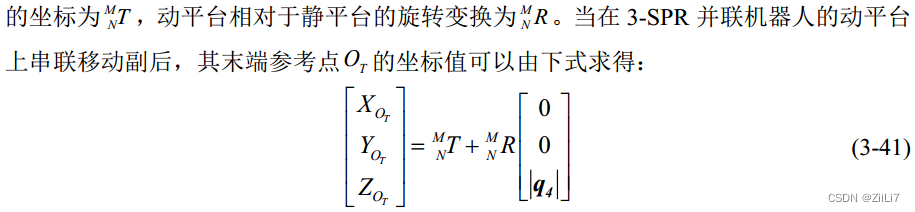
省流说明:本文提供球铰的非对称布置情况下其正逆运动学的求解,但需要有额外的输入参数 文章目录 3-SPR并联机器人的运动学模型逆运动学求解正运动学求解(待更新补充说明) 3-SPR并联机器人的运动学模型 S:球铰 P:移动副 R:转动副 3-SPR并联机器人即包含三条独立的SPR运动支链 输入:三个移动副(P)的伸长量 输出:系统末端参考点(一般是动平台的中心点) 运动学模型
Matlab 机器人工具箱 例程:运动学+动力学+路径规划+可视化
文章目录 1 创建机器人2 机器人显示3 机器人示教4 机器人路径规划:给定关节角路径5 机器人路径规划:给定末端位姿,求关节角路径6 工作空间可视化参考链接 1 创建机器人 clc;clear;close all;deg = pi/180;L1= Revolute('d', 0, 'a', 0, 'alpha', 0,'modified', ...'I', [0.1183 -
智能驾驶规划控制理论学习04-基于车辆运动学的规划方法
目录 一、线性二自由度汽车模型(自行车模型) 1、二自由度模型概述 2、不同参考点下的状态空间方程 3、前向仿真 二、运动基元生成方法 1、杜宾斯曲线(Dubins Curve) 2、Reeds Shepp Curve 三、多项式曲线(Polynomial Curve) 1、五次多项式曲线(Quintic Polynomial) 五次多项式曲线介绍 五次多项式

机械臂6---机械臂正运动学
机械臂运动包含两个问题,一是已知机械臂关节角,求对应的机械臂末端位置和姿态,称为机械臂正运动学;二是已知机械臂末端位置和姿态,求解对应机械臂关节角,称为机械臂逆运动学。 RRP机构 在已知机械臂关节角时,求解机械臂末端位置和姿态,求取末端坐标系相对于基座坐标系的变换方程即可。 求取机械臂正运动学可以分为以下几步:1.为机械臂个关节建立坐标系。