本文主要是介绍机器人正运动学,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
实验原理 :
对于一个具有 n 个自由度的操作臂,它的所有连杆位置可由一组 n 个关节变量来确定。 这样的一组变量常称为 n*1 的关节向量。所有关节矢量组成的空间称为关节空间。操作臂在 空间中位置与姿态是在空间相正交的轴上进行描述的,一般称这个空间位笛卡尔空间,或任 务空间和操作空间。操作臂的位置与姿态可以在关节空间或笛卡尔空间进行描述。
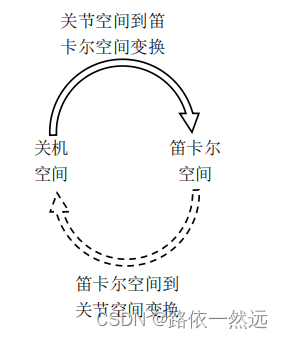
空间变换映射
正运动学是利用机器人各个关节变量的信息求取机器人末端的位置与姿态。即实现关节
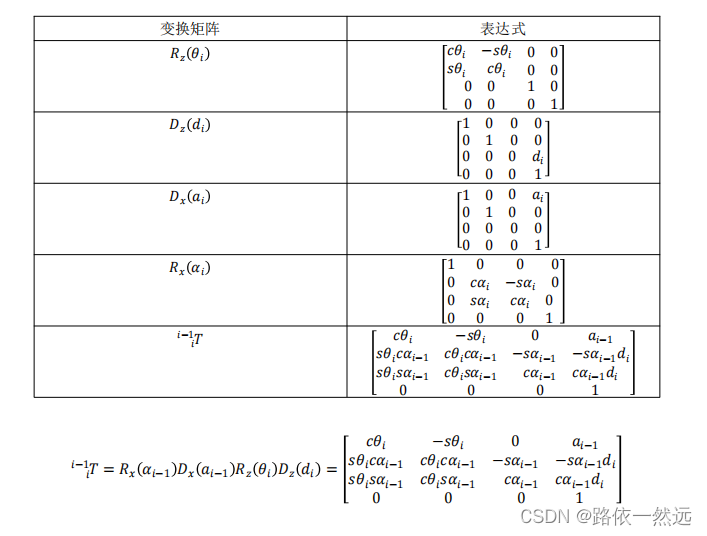
空间到笛卡尔空间的变换。 根据连杆坐标系的建立步骤(修正 D-H 参数法),可知连杆坐标系 { ? } 在坐标系 { i − 1 } 中的描述为:

该变换矩阵用于将在坐标系 { ? } 中定义的矢量变换成坐标系 { i− 1 } 下的描述:
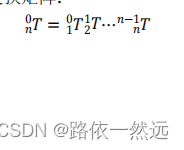
对于 n 自由度机器人,分别计算出各个连杆变换矩阵,把所有连杆变换矩阵连乘就能得到一
个坐标系 { n } 相对于坐标系 {0} 的变换矩阵:
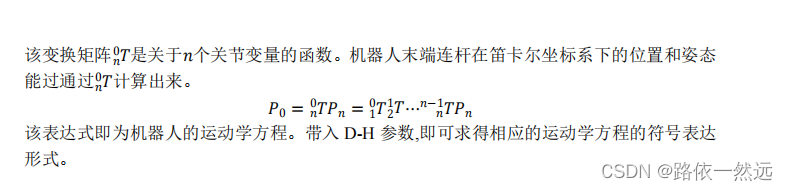
该变换矩阵  是关于?个关节变量的函数。机器人末端连杆在笛卡尔坐标系下的位置和姿态
是关于?个关节变量的函数。机器人末端连杆在笛卡尔坐标系下的位置和姿态
能过通过 ?
0 ? 计算出来。
实验步骤:
1 、 根据修正 D-H 参数法推导连杆坐标系 {i } 相对于坐标系 { i − 1 } 的变换矩阵。 连杆坐标系{i } 在坐标系 { i − 1 } 中的描述为:
2 、根据实验三建立的修正 D-H 参数推导 XB7 机器人各连杆变换矩阵的表达式。
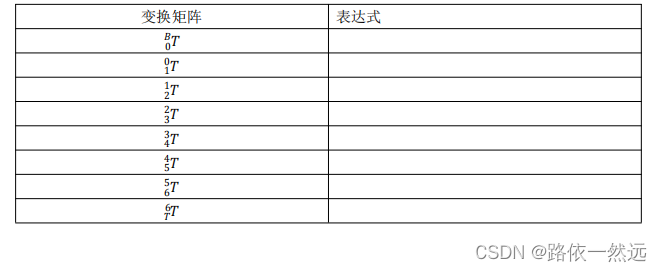
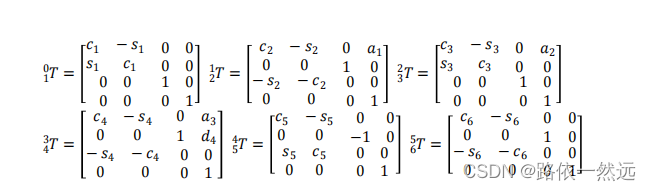
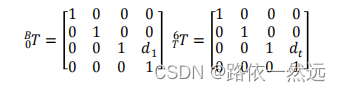
为了于 XB7 机器人基坐标和工具坐标方向保持一致,增加两个变换矩阵
3 、根据各个连杆的变换矩阵表达式推导正运动学表达式。 操作臂末端执行器在机器人笛卡尔空间的位置描述:
4 、编写正运动学代码:
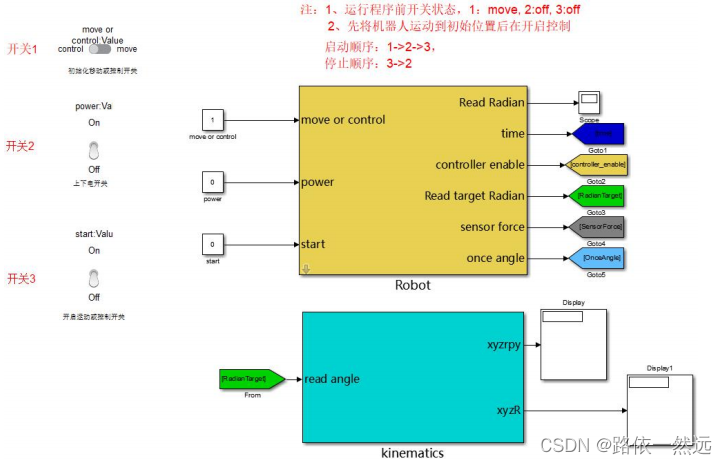
1)在matlab的simulink的sim-scape模块编写正运动模块
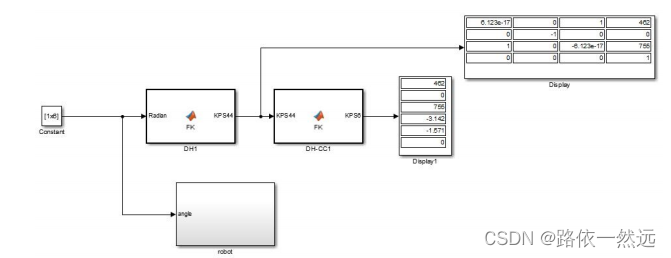
2) 双击 DH 模块
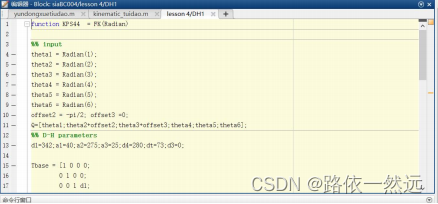
在该函数下,补充函数。 其中 Radian 表示机器人六个关节的弧度值。 KPS44 表示机器人末端的状态 4*4 矩阵 .
3) 双击 DH-CC 模块
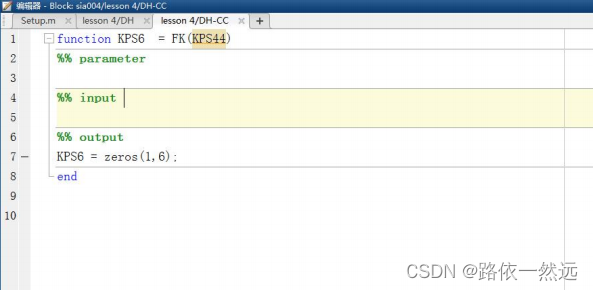
在该函数下,补充函数。 其中,KPS44 表示机器人末端的状态 4*4 矩阵, KPS6 表示 1*6 机器人末端的位置(前三个)和固定角姿态信息 ( 后三个 )
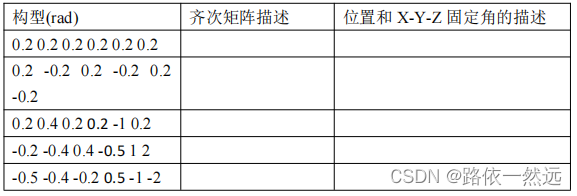
4)运行程序,改变输入关节角度,记录输出结果
5、真机实验步骤
1) 打开 labexp.exe ,点击“选择仿真模型”按键,打开“ 04 、机器人正运动学”,选择
basic_04_robot.slx 文集;
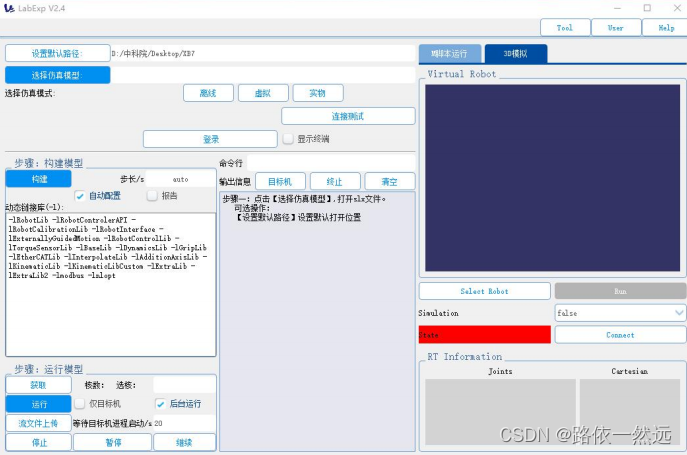
2) 打开 basic_04_robot.slx ,利用仿真实验完善 kinematics 模块
这篇关于机器人正运动学的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








