本文主要是介绍Soft Robotics:两栖环境下螃蟹仿生机器人的行走控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
传统水陆两栖机器人依靠轮胎或履带与表面的接触及摩擦产生推进力,这种对于表面接触的依赖性限制了现有水陆两栖机器人在低重力环境下(如水中)的机动性。利用生物自身的推进机制,人为激发生物运动行为,由活体生物与微机电系统组成的生物-机械混合系统为构建微小型水陆两栖机器人提供新思路。在广泛的生物载体中,螃蟹由于具有独特的步态,除此以外,螃蟹在水中使用鳃进行气体交换,使其可以在水下长期停留而不需浮到水面上,这些特性使其成为构建仿生水陆两栖机器人的良好载体。基于此,南洋理工大学的Hirotaka Sato团队通过电刺激彩虹蟹甲壳的感觉系统实现了对于半水栖蟹在陆地与水下环境中向不同方向的运动控制。由此构建的螃蟹混合机器人实现了从陆地到水中的平稳过渡,并证明了其对两栖环境的适应性。该混合机器人结构紧凑,体长仅 5 厘米,整体重量 50 克(含控制器),在海滨环境中的狭窄和非结构化工况下具有广泛应用潜力。
一、刺激位点选择与螃蟹混合机器人构建
在刺激位点的选择上,团队受到了蟑螂触角功能的启发,即蟑螂触角用于探知环境障碍,并通过触角对环境的机械接触做出行为决策的功能特性,从而假定彩虹蟹甲壳的机械刺激可能引发运动响应。因此,作者通过对螃蟹胸神经节中一对神经索(图1A)的神经记录发现,螃蟹甲壳对机械刺激具有敏感性,当甲壳接收到接触刺激时,神经索的神经元活动增强(图1C),其放电频率与机械接触频率呈现出正相关(图1E)。基于此,作者在甲壳上选择了四个刺激位点(图2B):一对位于甲壳上白点的外侧,这些白点是彩虹蟹的形态标志。另一对位于第五对附肢轴突关节的前侧。四个刺激位点通过电极连接到彩虹蟹所携带的刺激背包(图2B)的四个数模输出通道上。通过双极方波脉冲信号的电刺激诱导与刺激方向相反的运动响应。依据刺激位点的不同,可诱导螃蟹分别产生向左、向右、向前三个方向的运动响应(图2C)。刺激背包主要包括微控制器与蓝牙无线控制芯片(图2B)。蓝牙在空气中通讯距离可达到30m,而在水下通讯距离只有几英寸。本研究所设计的背包可在水下5cm深的位置通过蓝牙与中央工作站进行通讯。背包通过双面胶固定在打磨后的螃蟹甲壳上,随后背包表面涂覆硅酮密封胶防水,以满足螃蟹混合机器人的两栖工作需求。
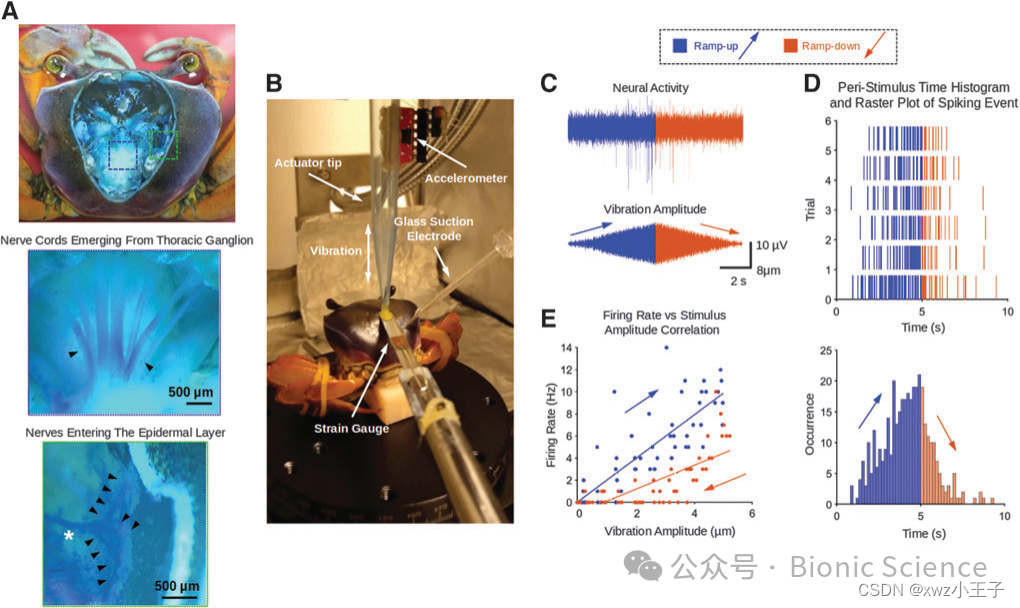
图1 螃蟹甲壳感觉系统
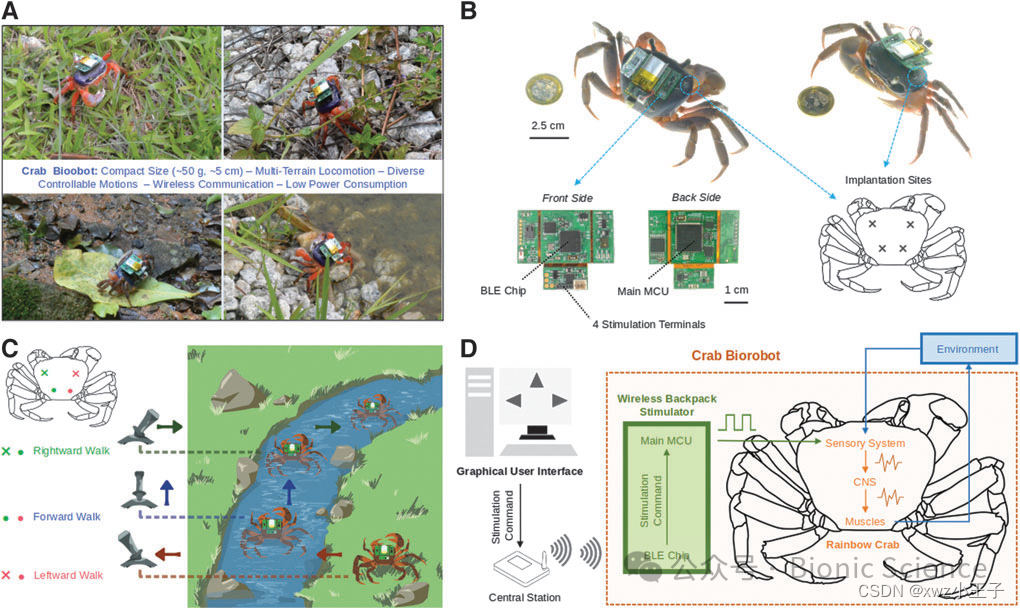
图2 螃蟹混合机器人系统
二、螃蟹混合机器人在陆地与水中的运动调控效果
在自然状态中,无论是陆地或是水中,彩虹蟹主要采用横着走的步态。而在刺激状态下,无论是陆地或是水中,当螃蟹靠近附肢轴突关节的两个刺激位点收到脉冲信号时,螃蟹表现出向前行走的行为特征(图3,4);当螃蟹左侧的两个刺激位点收到信号,螃蟹则表现出向右行走的行为,反之亦然(图3,4)。对于陆地与水中两种实验场景,螃蟹对于同样刺激位点均表现出一致的行为响应。值得注意的是,在左侧与右侧行为诱导下,螃蟹平均行走方向变化分别为-40.1°和42.4°,而身体转动角度分别仅为-4.58°和4.58°,同时转向角度的变化与行走方向的变化呈现出正相关性。由此可以看出,行走方向主要通过调整平移运动的比例来改变行走方向,而不是通过转向改变行走方向。

图3 在陆地环境中,螃蟹的自然步态与电刺激下的步态
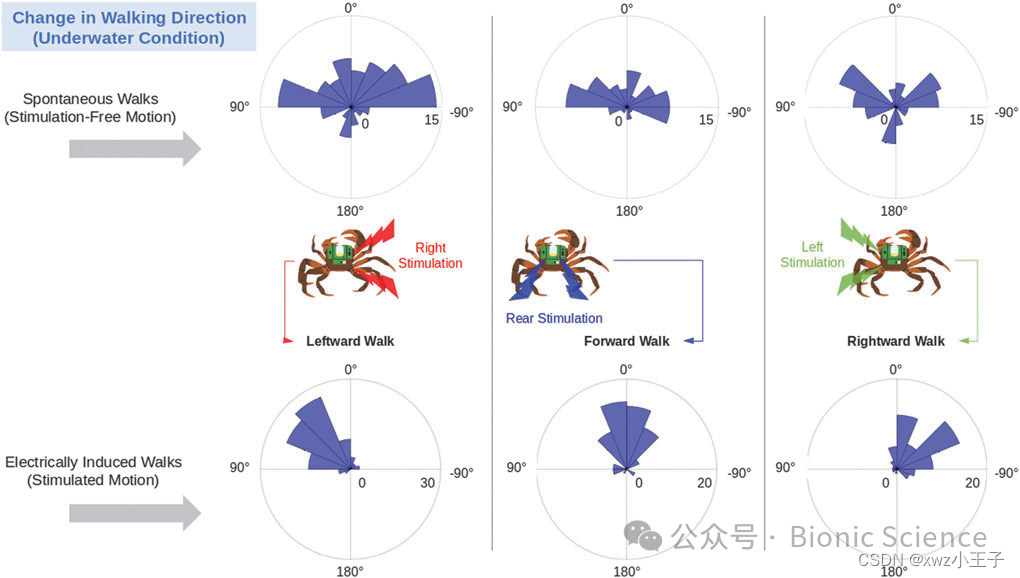
图4 在水下环境中,螃蟹的自然步态与电刺激下的步态
三、总结
本研究中团队主要利用彩虹蟹开发了一款两栖生物混合机器人。这种螃蟹混合机器人配备了无线控制背包,可以在陆地和水下条件下通过电刺激甲壳不同位点实现三种基本运动调控。该行为调控策略利用了螃蟹甲壳接收有害刺激时的躲避行为特点,然而,目前仍需要更深入的研究进一步揭示其潜在机制。总体而言,本文所设计的螃蟹混合机器人在狭窄和复杂的两栖环境下具有多种应用潜力,例如管道探测,侦察与救灾。
这篇关于Soft Robotics:两栖环境下螃蟹仿生机器人的行走控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







