两栖专题
Soft Robotics:两栖环境下螃蟹仿生机器人的行走控制
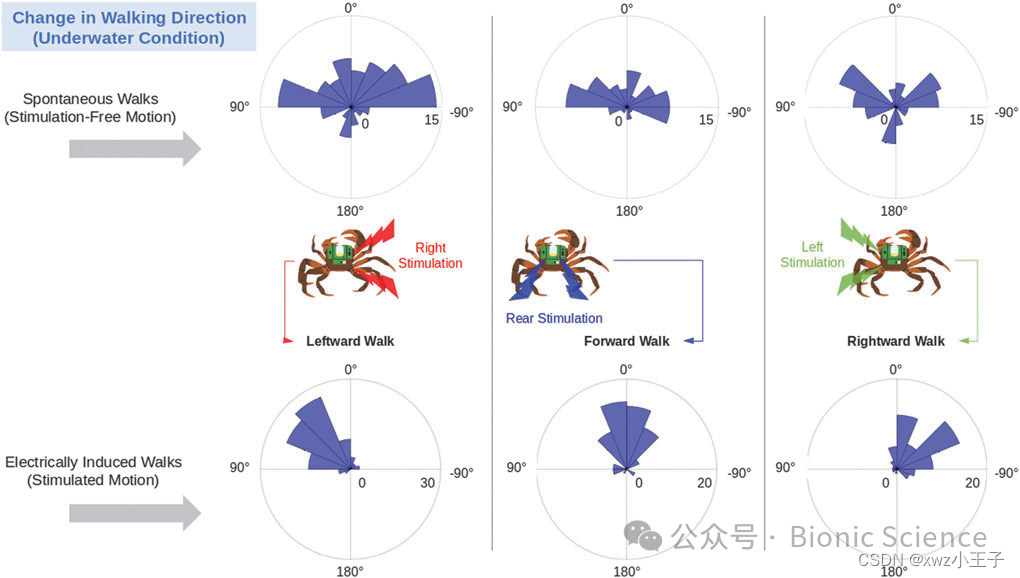
传统水陆两栖机器人依靠轮胎或履带与表面的接触及摩擦产生推进力,这种对于表面接触的依赖性限制了现有水陆两栖机器人在低重力环境下(如水中)的机动性。利用生物自身的推进机制,人为激发生物运动行为,由活体生物与微机电系统组成的生物-机械混合系统为构建微小型水陆两栖机器人提供新思路。在广泛的生物载体中,螃蟹由于具有独特的步态,除此以外,螃蟹在水中使用鳃进行气体交换,使其可以在水下长期停留而不需浮到水面上,这
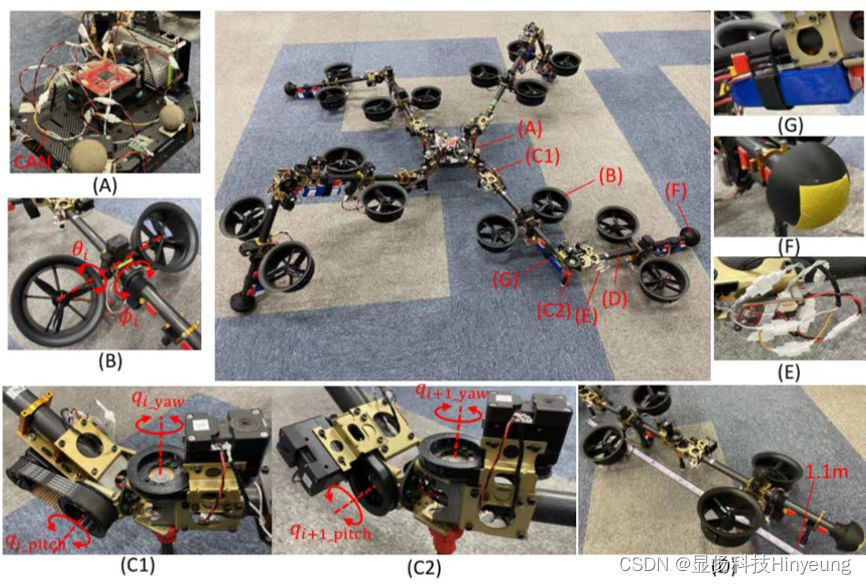
东京大学最新研究成果!一种可实现陆空两栖的新型四足机器人SPIDAR,具备多模态运动能力
原创/文 BFT机器人 现实中,蜘蛛可以凭借飘荡的蛛丝在空中漂浮,让它们能够穿越复杂地形。普通蜘蛛长度只有几毫米,重量只有几十克,如何让比蜘蛛重数百倍的机器人实现多模态运动,是众多学者研究的热点。 具有多模态运动能力的机器人,几乎都是移动系统的大杂烩,不能真正实现协同工作。例如,通过给多足机器人装上一堆螺旋桨们,能够让机器人实现飞行,但在其他时间,足或者螺旋桨对机器人本身来说只是增添额