soft专题

【xilinx】Versal Soft DDR4 内存控制器 - XCVP1902-2M 速度等级设备上某些存储体的时序收敛问题
描述 当在 XCVP1902 设备上使用软核内存控制器时,如果速度等级为 -2M,目标 Fmax 为 2933 Mbps,某些设计可能无法满足某些存储体的时序要求。 解决方案 如果软核存储控制器使用 SLR0 中的存储体 704/707、SLR3 中的存储体 714/719、SLR1 中的存储体 804/807 或 SLR2 中的存储体 814/819,那么时序收敛可能会很困难。


【银河麒麟高级服务器操作系统】soft lockup软锁实例详细记录分析及处理建议
了解更多银河麒麟操作系统全新产品,请点击访问 麒麟软件产品专区:https://product.kylinos.cn 开发者专区:https://developer.kylinos.cn 文档中心:https://documentkylinos.cn 现象描述 启nginx服务,但是报了softlock的错误,而且当时负载比较高,资源占用 现象分析 message日志分析
Openstack -- Soft/Hard Reboot
1、nova 命令 #软重启nova reboot SERVER#硬重启nova reboot --hard SERVER 2、软硬重启区别 1) 软重启只是重启操作系统 ,整个过程中,虚拟机还处于运行状态,相当于在linux中执行reboot命令; 2)硬重启是重启虚拟机,相当于关机之后再开机。 3、代码分析 #nova.nova.api.openstack.compute.se
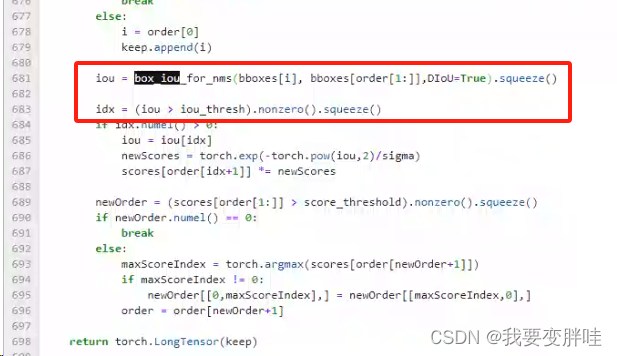
(超详细)YOLOV7改进-Soft-NMS(支持多种IoU变种选择)
1.在until/general.py文件最后加上下面代码 2.在general.py里面找到这代码,修改这两个地方 3.之后直接运行即可

东芝-Soft Limit 报警及其解决办法
灵感来源与生活,在生活中总能有意想不到的惊喜,下面来看看小编今天的惊喜!!! 今天不知道怎么了,有人来找就说是机器人坏了,一直报警,重启关机回原点也没有用。 意外到来,只能使用手柄将控制器打手动,来看看报警显示什么。 下面就看到了这,我靠第一次看见,只能看看手册(看手册非常重要),看看报警篇怎么解决了 手册内容如下 简单来说好解决 解决办法:

UltraScale Soft Error Mitigation
https://forums.xilinx.com/t5/%E5%85%B6%E4%BB%96FPGA%E5%99%A8%E4%BB%B6%E6%9E%B6%E6%9E%84/Xilinx-%E8%BD%AF%E9%94%99%E8%AF%AF%E7%BC%93%E8%A7%A3-SEM-IP%E5%86%85%E9%83%A8%E5%B7%A5%E4%BD%9C%E6%9C%BA%E7
git reset --hard,--soft,--mix 如果代码不见了,应该怎么操作
git reset 首先需要知道工作区(working diretory)和暂存区(Stage)这两个概念。工作区的概念不仅包含你实际更改的文件还应当包括当前修改但未add存入暂存区的文件变化信息,暂存区的作用则是临时存储文件的变化信息,在git add file操作之后,暂存区中将记录file文件上的修改信息。暂存区的存在更细化了时间节点,要知道commit的往往是有重大改变的版本或者是在一次

CODEFORCES --- 151A. Soft Drinking
151A. Soft Drinking 今年冬天的恩沃茨克非常寒冷!一群 n 朋友决定买 k 瓶名为 "Take-It-Light "的软饮料来取暖。每瓶饮料有 l 毫升。他们还买了 c 个酸橙,并把每个酸橙切成 d 片。之后,他们又找到了 p 克盐。 为了祝酒,每个朋友需要 nl 毫升饮料、一片青柠和 np 克盐。朋友们想尽可能多地干杯,前提是他们喝的量相同。每个朋友可以干多少杯? 输入

目标检测之Soft-NMS
一、目标检测之Soft-NMS Improving Object DetectionWith One Line of Code 论文链接:https://arxiv.org/abs/1704.04503论文代码:https://github.com/bharatsingh430/soft-nms 二、Soft-NMS 算法 原来的NMS可以描述如下:将IOU大于阈值的窗口的得分全部置为0
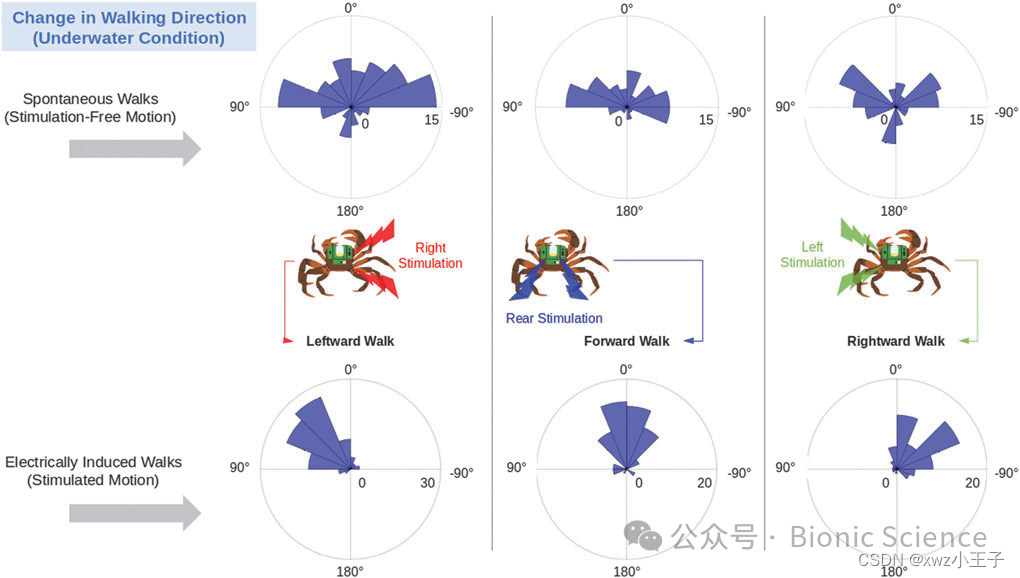
Soft Robotics:两栖环境下螃蟹仿生机器人的行走控制
传统水陆两栖机器人依靠轮胎或履带与表面的接触及摩擦产生推进力,这种对于表面接触的依赖性限制了现有水陆两栖机器人在低重力环境下(如水中)的机动性。利用生物自身的推进机制,人为激发生物运动行为,由活体生物与微机电系统组成的生物-机械混合系统为构建微小型水陆两栖机器人提供新思路。在广泛的生物载体中,螃蟹由于具有独特的步态,除此以外,螃蟹在水中使用鳃进行气体交换,使其可以在水下长期停留而不需浮到水面上,这

Cg Programming/Unity/Soft Shadows of Spheres球体的软阴影
本教程介绍了球体的软阴影。 这是有关光照一系列教程中的一章,它已经超出了Phone反射模型的范围,而Phone反射模型是一个局部照明模型并且没有把阴影考虑进来。目前的技术可以在任何网格上渲染单个球体的软阴影,并且跟Orion Sky Lawlor提出的技术多少有点关系(查看下面“扩展阅读”的部分)。着色器可以扩展到以渲染性能为代价来渲染少量球体的阴影;但是,它并不能轻易地被应用到任何种类的阴
![[linux][异常检测] hung task, soft lockup, hard lockup, workqueue stall](https://img-blog.csdnimg.cn/direct/2a73f5bce477440788668bdd4cf2b0f8.png)
[linux][异常检测] hung task, soft lockup, hard lockup, workqueue stall
hung task,soft lockup,hard lockup,workqueue stall 是 linux 内核中的异常检测机制,这 4 个检测均是通过时间维度上的检测来判断异常。 在时间维度上的检测机制,有两个核心的点: (1)一个表示被检测对象最新状态的变量 这个变量可以用时间戳表示,也可以是一个计数器。 (2)一个定时器 这个定时器内部做检测工作,检测的依据就是状态变量

行人轨迹论文阅读SSAGCN: Social Soft Attention Graph Convolution Network for Pedestrian Trajectory Prediction
SSAGCN: Social Soft Attention Graph Convolution Network for Pedestrian Trajectory Prediction SSAGCN:用于行人轨迹预测的社会软注意力图卷积网络 Abstract- 行人轨迹预测是自动驾驶的一项重要技术,近年来已成为研究热点。为了准确预测行人未来的合理轨迹,不可避免地要同时考虑行人之间的社交互动和周围
hung task, soft lockup, hard lockup, workqueue stall
hung task,soft lockup,hard lockup,workqueue stall 是 linux 内核中的异常检测机制,这 4 个检测均是通过时间维度上的检测来判断异常。 在时间维度上的检测机制,有两个核心的点: (1)一个表示被检测对象最新状态的变量 这个变量可以用时间戳表示,也可以是一个计数器。 (2)一个定时器 这个定时器内部做检测工作,检测的依据就是状态变量

阅读笔记(SOFT COMPUTING 2018)Seam elimination based on Curvelet for image stitching
参考文献: Wang Z, Yang Z. Seam elimination based on Curvelet for image stitching[J]. Soft Computing, 2018: 1-16. 注:SOFT COMPUTING 大类学科小类学科Top期刊综述期刊工程技术 3区 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE 计算机:

《Spelling Error Correction with Soft-Masked BERT》阅读记录
《Spelling Error Correction with Soft-Masked BERT》 To be published at ACL 2020. 2020.5.15 链接:https://arxiv.org/abs/2005.07421 摘要 彼时CSC的SOTA方法:在语言表示模型BERT的基础上,在句子的每个位置从候选词列表中选择一个字符进行纠正(包括不纠正)。 但这

SAC(Soft Actor-Critic)理论与代码解释
标题 理论序言基础Q值与V值算法区别 SAC概念Q函数与V函数最大化熵强化学习(Maximum Entropy Reinforcement Learning, MERL)算法流程1个actor,4个Q Critic1个actor,2个V Critic,2个Q Critic 代码详解Actor网络理论中的训练策略 π( ϕ \phi ϕ) 时的损失函数:Q函数训练时的损失函数:温度系数的

Linux软锁cpu,记一次服务器内核软死锁(soft lockup)解决方案
nogo,benlux,fc兵蜂 记一次服务器内核软死锁(soft lockup)解决方案 2020-08-02 05:34:28 程梦雨说娱乐 概述 简单记录下最近处理的一个内核软死锁(soft lockup)问题,仅供参考。 1、检查系统信息 grep -C 5 "NMI watchdog: BUG" /var/log/messages 服务器异常卡顿,但CPU、内存等资源都是正常的,观察系
Registry key 'Software\JavaSoft\Java Runtime Environment'\CurrentVersion' ha
运行java.exe 出现Registry key 'Software\JavaSoft\Java Runtime Environment\CurrentVersion'错误 以前就出现过,觉得自己环境变量都设了,应该没问题了,懒得想了,重装了就好了。 这次很奇怪的忽然之间又不行了,所以百度了一下,发现文章如下: 运行java.exe 出现Registry key 'Software\JavaS
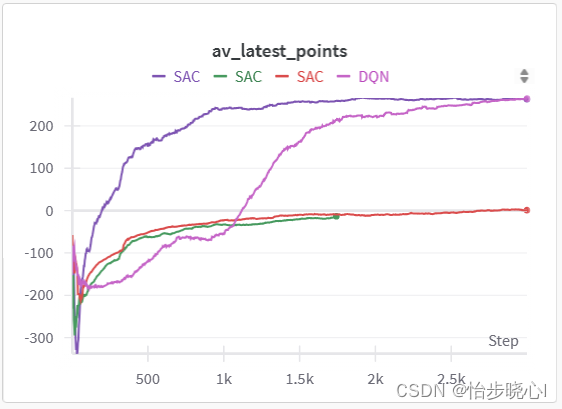
14、强化学习Soft Actor-Critic算法:推导、理解与实战
基于LunarLander登陆器的Soft Actor-Critic强化学习(含PYTHON工程) Soft Actor-Critic算法是截至目前的T0级别的算法了,当前正在学习,在此记录一下下。 其他算法: 07、基于LunarLander登陆器的DQN强化学习案例(含PYTHON工程) 08、基于LunarLander登陆器的DDQN强化学习(含PYTHON工程) 09、基于Luna
systemverilog-内嵌约束randomize()with{}、soft 约束、local::
内嵌约束: SV允许使用 randomize()with{} 来增加额外的约束,这和在类里增加约束是等效的。 当没有soft修饰时,约束发生冲突则报错;当soft修饰时,则以外部约束的优先级高于内部 class chnl_generator extends uvm_component;rand int pkt_id = 0;rand int ch_id = -1;rand int data_ni
Actel---ProASIC®3 Flash Family FPGAs with Optional Soft ARM® Support
ProASIC®3 Flash Family FPGAs with Optional Soft ARM® Support Features and Benefits High Capacity • 30 k to 1 Million System Gates • Up to 144 kbits of True Dual-Port SRAM • Up to 300 User I/Os Reprog

Server2008,本地先安装JDK1.7,后安装1.8时报错Error: Registry key ‘Software\JavaSoft\Java Runtime Environment‘
参考链接:https://www.jianshu.com/p/89ec2841fa4f
soft-argmax踩坑
最近在2D human pose estimation时需要用到soft-argmax,找了几个版本的函数,都有一个问题 RuntimeError: "softmax_lastdim_kernel_impl" not implemented for 'Long' 一、代码如下 def softargmax2d(input, beta=100):*_, h, w = input.shapein