本文主要是介绍目标检测之Soft-NMS,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、目标检测之Soft-NMS
Improving Object DetectionWith One Line of Code
- 论文链接:https://arxiv.org/abs/1704.04503
- 论文代码:https://github.com/bharatsingh430/soft-nms
二、Soft-NMS 算法

原来的NMS可以描述如下:将IOU大于阈值的窗口的得分全部置为0。
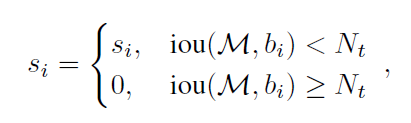
文章的改进有两种形式:如下
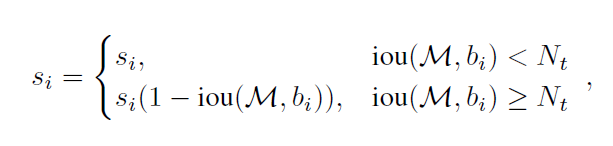
- 一种是线性加权的:
- 一种是高斯加权的:
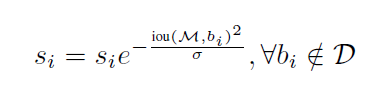
分析上面的两种改进形式,思想都是:M为当前得分最高框,bi为待处理框,bi和M的IOU越大,bi的得分Si就下降的越厉害。
源码:
def cpu_soft_nms(np.ndarray[float, ndim=2] boxes, float sigma=0.5, float Nt=0.3, float threshold=0.001, unsigned int method=0):cdef unsigned int N = boxes.shape[0]cdef float iw, ih, box_areacdef float uacdef int pos = 0cdef float maxscore = 0cdef int maxpos = 0cdef float x1,x2,y1,y2,tx1,tx2,ty1,ty2,ts,area,weight,ovfor i in range(N):maxscore = boxes[i, 4]maxpos = itx1 = boxes[i,0]ty1 = boxes[i,1]tx2 = boxes[i,2]ty2 = boxes[i,3]ts = boxes[i,4]pos = i + 1# get max boxwhile pos < N:if maxscore < boxes[pos, 4]:maxscore = boxes[pos, 4]maxpos = pospos = pos + 1# add max box as a detection boxes[i,0] = boxes[maxpos,0]boxes[i,1] = boxes[maxpos,1]boxes[i,2] = boxes[maxpos,2]boxes[i,3] = boxes[maxpos,3]boxes[i,4] = boxes[maxpos,4]# swap ith box with position of max boxboxes[maxpos,0] = tx1boxes[maxpos,1] = ty1boxes[maxpos,2] = tx2boxes[maxpos,3] = ty2boxes[maxpos,4] = tstx1 = boxes[i,0]ty1 = boxes[i,1]tx2 = boxes[i,2]ty2 = boxes[i,3]ts = boxes[i,4]pos = i + 1# NMS iterations, note that N changes if detection boxes fall below thresholdwhile pos < N:x1 = boxes[pos, 0]y1 = boxes[pos, 1]x2 = boxes[pos, 2]y2 = boxes[pos, 3]s = boxes[pos, 4]area = (x2 - x1 + 1) * (y2 - y1 + 1)iw = (min(tx2, x2) - max(tx1, x1) + 1)if iw > 0:ih = (min(ty2, y2) - max(ty1, y1) + 1)if ih > 0:ua = float((tx2 - tx1 + 1) * (ty2 - ty1 + 1) + area - iw * ih)ov = iw * ih / ua #iou between max box and detection boxif method == 1: # linearif ov > Nt: weight = 1 - ovelse:weight = 1elif method == 2: # gaussianweight = np.exp(-(ov * ov)/sigma)else: # original NMSif ov > Nt: weight = 0else:weight = 1boxes[pos, 4] = weight*boxes[pos, 4]# if box score falls below threshold, discard the box by swapping with last box# update Nif boxes[pos, 4] < threshold:boxes[pos,0] = boxes[N-1, 0]boxes[pos,1] = boxes[N-1, 1]boxes[pos,2] = boxes[N-1, 2]boxes[pos,3] = boxes[N-1, 3]boxes[pos,4] = boxes[N-1, 4]N = N - 1pos = pos - 1pos = pos + 1keep = [i for i in range(N)]return keep
结果

这篇关于目标检测之Soft-NMS的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









