本文主要是介绍SAC(Soft Actor-Critic)理论与代码解释,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
标题
- 理论
- 序言基础
- Q值与V值
- 算法区别
- SAC
- 概念
- Q函数与V函数
- 最大化熵强化学习(Maximum Entropy Reinforcement Learning, MERL)
- 算法流程
- 1个actor,4个Q Critic
- 1个actor,2个V Critic,2个Q Critic
- 代码详解
- Actor网络
- 理论中的训练策略 π( ϕ \phi ϕ) 时的损失函数:
- Q函数训练时的损失函数:
- 温度系数的更新
参考连接:SAC(Soft Actor-Critic)阅读笔记 - Feliks的文章 - 知乎
理论
序言基础
Q值与V值
在强化学习中,Critic网络可以采用Q值(动作值函数)或V值(状态值函数),具体选择取决于你使用的算法以及问题的特性。
-
Q值(动作值函数): Critic网络输出每个状态动作对的Q值,表示在给定状态下采取某个动作的预期累积奖励。这种方法通常用于Q-learning和Deep Q Network(DQN)等算法中,其中主要关注最优动作的选择。
-
V值(状态值函数): Critic网络输出每个状态的V值,表示在给定状态下的预期累积奖励。这种方法通常用于值迭代方法,如异策略(Off-policy)的蒙特卡洛控制和异策略时序差分学习。 V(s) 表示智能体在状态 s 下,从该状态开始直到未来所能获得的累积奖励的期望值。换句话说,它是智能体处于状态 s 时,遵循某种策略所带来的长期回报的估计。
选择Q值还是V值通常取决于你解决的问题。如果你关心在每个状态下选择最优动作,那么使用Q值更为合适。如果你更关心每个状态的价值,而不仅仅是最优动作的话,那么使用V值可能更合适。 Q ( s , a ) Q(s, a) Q(s,a) 表示智能体在状态 s 下执行动作 a 后,紧接着直到未来的累积奖励的期望值。与 V 值相比,Q 值不仅考虑了状态,还考虑了特定的动作选择。
在一些算法中,如深度确定性策略梯度(Deep Deterministic Policy Gradient,DDPG),使用的是一个Critic网络同时输出Q值和Actor网络的参数。这种情况下,Critic网络的输出可以同时用于评估状态动作对的Q值和评估状态的V值。
算法区别
D4PG(引入分布式的critic,并使用多个actor(learner)共同与环境交互)
TD3(参考了double Q-learning的思想来优化critic,延缓actor的更新,计算critic的优化目标时在action上加一个小扰动)
PPO:依赖于importance sampling实现的off-policy算法在面对太大的策略差异时将无能为力(正在训练的policy与实际与环境交互时的policy差异过大),所以学者们认为PPO其实是一种on-policy的算法,这类算法在训练时需要保证生成训练数据的policy与当前训练的policy一致,对于过往policy生成的数据难以再利用,所以在sample efficiency这条衡量强化学习(Reinforcement Learning, RL)算法的重要标准上难以取得优秀的表现。
SAC
概念
SAC是基于最大熵(maximum entropy)这一思想发展的RL算法,其采用与PPO类似的随机分布式策略函数(Stochastic Policy),并且是一个off-policy,actor-critic算法
将熵引入RL算法的好处为,可以让策略(policy)尽可能随机,agent可以更充分地探索状态空间,避免策略早早地落入局部最优点(local optimum),并且可以探索到多个可行方案来完成指定任务,提高抗干扰能力。
Q函数与V函数
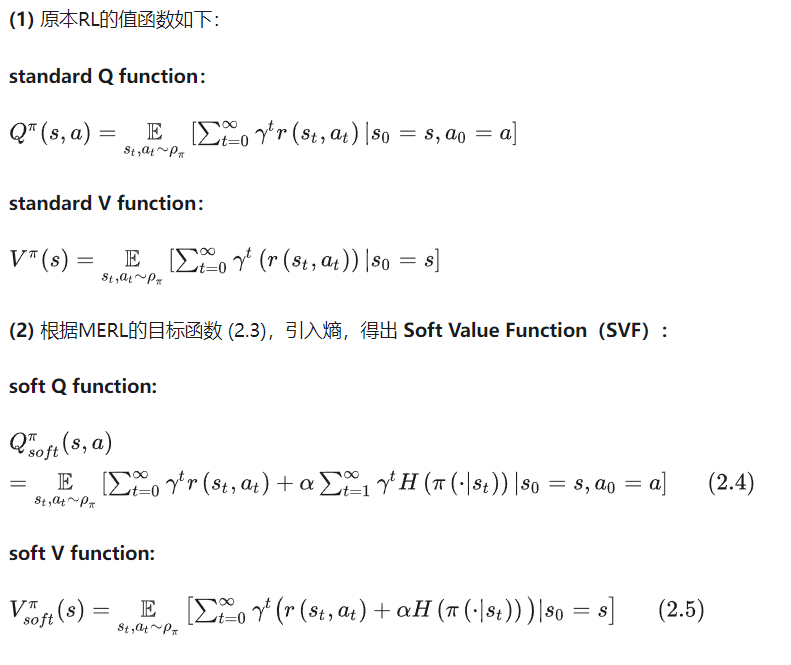
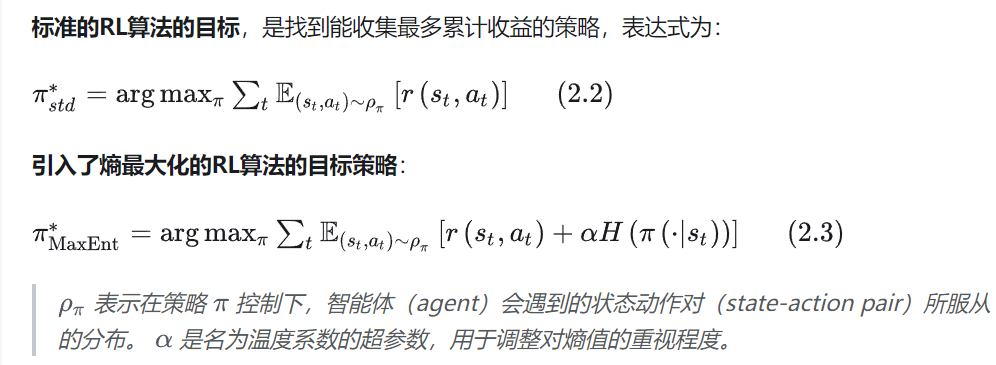
最大化熵强化学习(Maximum Entropy Reinforcement Learning, MERL)
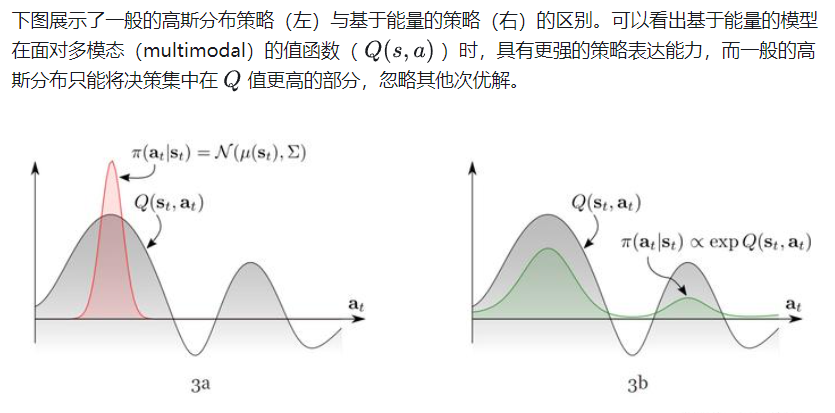
MERL采用了独特的策略模型。为了适应更复杂的任务,MERL中的策略不再是以往的高斯分布形式,而是用基于能量的模型(energy-based model)来表示策略:
算法流程
算法同样包括策略评估(Policy Evaluation),与策略优化(Policy Improvement),在这两个步骤交替运行下,值函数与策略都可以不断逼近最优。

1个actor,4个Q Critic
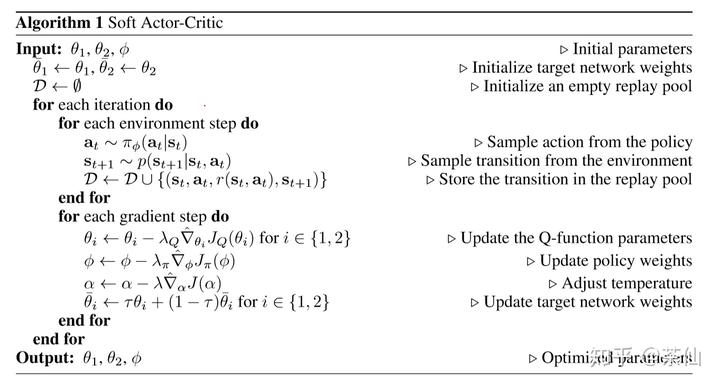
SAC的论文有两篇,一篇是《Soft Actor-Critic Algorithms and Applications》,2018年12月挂arXiv,其中SAC算法流程如下所示,它包括1个actor网络,4个Q Critic网络:(代码使用的是这个:Github链接)
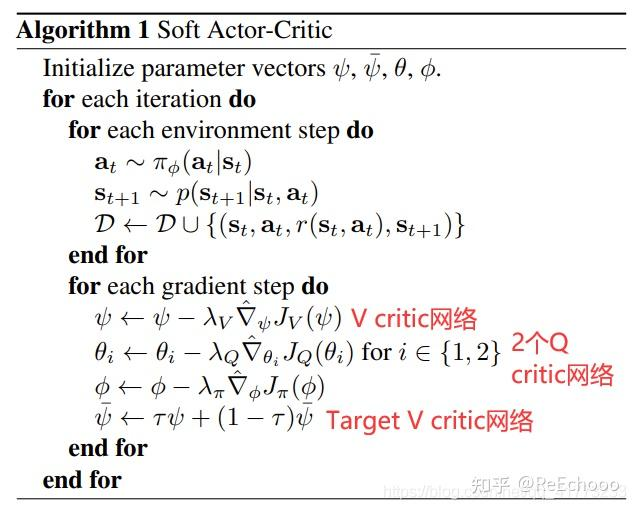
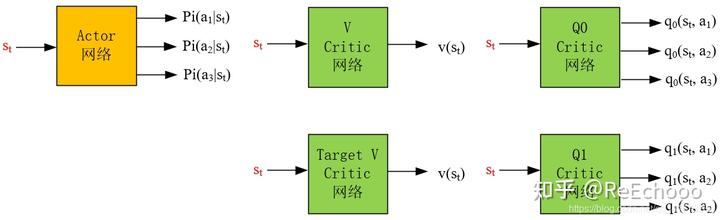
1个actor,2个V Critic,2个Q Critic
一篇是《Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor》,2018年1月挂arXiv,其中SAC算法流程如下所示,它包括1个actor网络,2个V Critic网络(1个V Critic网络,1个Target V Critic网络),2个Q Critic网络:
参考知乎
代码详解
Actor网络
class Actor(nn.Module):def __init__(self, state_dim, action_dim, hidden_width, max_action):super(Actor, self).__init__()self.max_action = max_actionself.l1 = nn.Linear(state_dim, hidden_width)self.l2 = nn.Linear(hidden_width, hidden_width)self.mean_layer = nn.Linear(hidden_width, action_dim)self.log_std_layer = nn.Linear(hidden_width, action_dim)def forward(self, x, deterministic=False, with_logprob=True):x = F.relu(self.l1(x))x = F.relu(self.l2(x))mean = self.mean_layer(x)log_std = self.log_std_layer(x) # We output the log_std to ensure that std=exp(log_std)>0log_std = torch.clamp(log_std, -20, 2)std = torch.exp(log_std)dist = Normal(mean, std) # Generate a Gaussian distributionif deterministic: # When evaluating,we use the deterministic policya = meanelse:a = dist.rsample() # reparameterization trick: mean+std*N(0,1)if with_logprob: # The method refers to Open AI Spinning up, which is more stable.log_pi = dist.log_prob(a).sum(dim=1, keepdim=True)log_pi -= (2 * (np.log(2) - a - F.softplus(-2 * a))).sum(dim=1, keepdim=True)else:log_pi = Nonea = self.max_action * torch.tanh(a) # Use tanh to compress the unbounded Gaussian distribution into a bounded action interval.return a, log_pi
理论中的训练策略 π( ϕ \phi ϕ) 时的损失函数:

对应代码的:
# Compute actor lossa, log_pi = self.actor(batch_s)Q1, Q2 = self.critic(batch_s, a)Q = torch.min(Q1, Q2)actor_loss = (self.alpha * log_pi - Q).mean() ##这里就是关键了撒
Q函数训练时的损失函数:

对应代码:
with torch.no_grad():batch_a_, log_pi_ = self.actor(batch_s_) # a' from the current policy# Compute target Qtarget_Q1, target_Q2 = self.critic_target(batch_s_, batch_a_)target_Q = batch_r + self.GAMMA * (1 - batch_dw) * (torch.min(target_Q1, target_Q2) - self.alpha * log_pi_)# Compute current Qcurrent_Q1, current_Q2 = self.critic(batch_s, batch_a)# Compute critic losscritic_loss = F.mse_loss(current_Q1, target_Q) + F.mse_loss(current_Q2, target_Q)
温度系数的更新

H 0 \mathcal{H_0} H0 是预先定义好的最小策略熵的阈值。
# Update alphaif self.adaptive_alpha:# We learn log_alpha instead of alpha to ensure that alpha=exp(log_alpha)>0alpha_loss = -(self.log_alpha.exp() * (log_pi + self.target_entropy).detach()).mean()self.alpha_optimizer.zero_grad()alpha_loss.backward()self.alpha_optimizer.step()self.alpha = self.log_alpha.exp()
这篇关于SAC(Soft Actor-Critic)理论与代码解释的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





