行走专题

论文速读|重新审视奖励设计与评估:用于强健人型机器人站立与行走控制的方法
论文地址:https://arxiv.org/pdf/2404.19173 这篇论文为类人机器人站立和行走(SaW)控制器的持续可衡量改进奠定了基础。通过引入一套定量实际基准测试方法,作者展示了现有控制器的优缺点,并通过基准测试指导新控制器的训练,最终实现了增强的控制器,成功处理了所有测试的扰动。结果表明,当前的RL控制器在能量效率和仿真到现实差距方面存在局限性。未来的工作应专注于在不牺牲
陈坤2024行走的力量启程 重归自然感受自我
近日,由陈坤发起的心灵建设公益项目“行走的力量”发布2024宣传片,今年行走以“行止由心,自然生长”为主题,向大家传递希望在行走的过程中感受自我,自由生长,同时发出“你,为什么而出发”的提问,开启第14年的行走。 从2011年项目发起,到现在已经走了十四年,每次出发,都是全新的收获。陈坤和团队通过网络进行志愿者招募,和有心人一起同行,开启长达一周左右的行走,不仅是拥抱自然,更是为了在这个

人体行走步态周期转换为不同相位描述
目录 一、步行周期 二、相关论文描述 三、参考文献 一、步行周期 人体行走时的步态状态通常采用传感器进行判断,比如Dong Jin Hyun等[1]通过嵌入两个力感应电阻的鞋垫来估计的步行状态,其中一个检测脚趾接触,另一个检测脚后跟接触[5]。Conor James Walsh[3]基于外骨骼的角度和力传感器读数,实现了状态机控制策略。上述论文都是将连续步态离散化

汽车是否能围绕一圈行走
public class Solution {//解法一:贪心算法求解public int canCompleteCircuit(int[] gas, int[] cost) {int total=0,sum=0;int index=-1;for(int i=0;i!=gas.length;i++){ sum+=gas[i]-cost[i];total+=gas[i]-cost[i];if(s
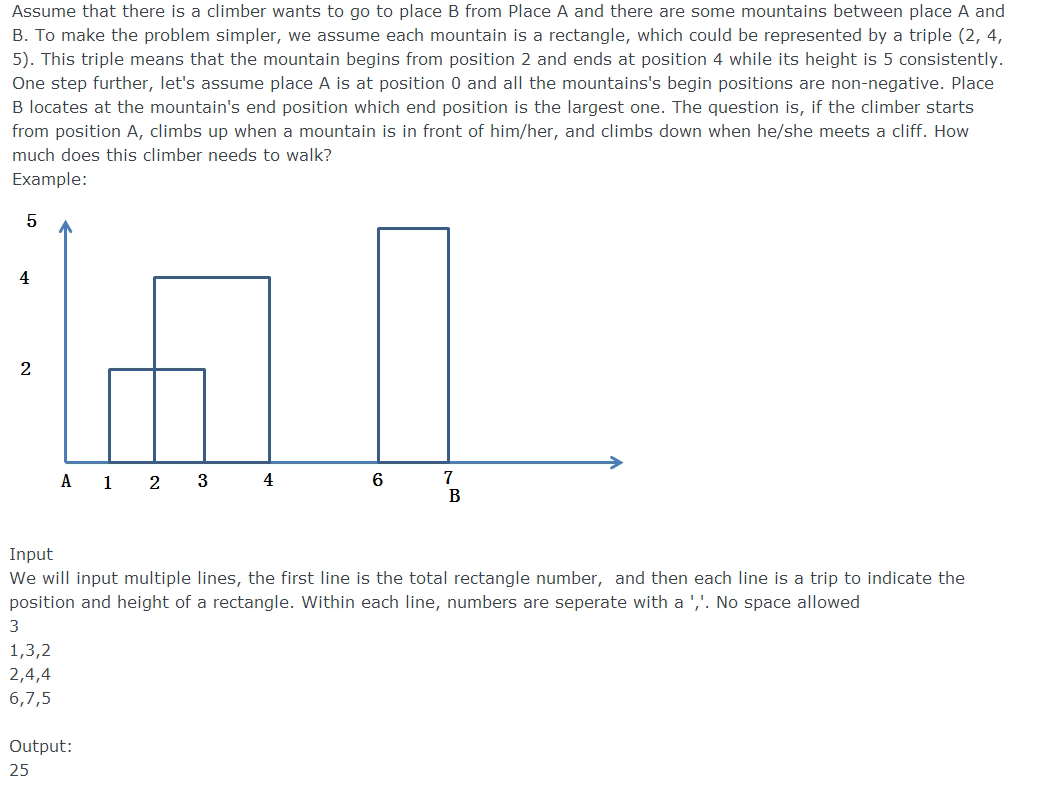
**360 笔试 登山者行走步数
360 笔试 登山者的步数 分析代码如下: #include <iostream>#include <cstdlib>#include <cstdio>#include <algorithm>#include <cstring>using namespace std;const int n = 100;typedef struct Mountains{int begin;in

模仿动物行走的腿式机器人是未来发展趋势吗?
在自然界和人类社会中,存在人类无法到达的地方和可能危及人类生命的特殊场合,如行星表面、工地、矿井、防灾救援和反恐斗争等,对这些环境进行不断的探索和研究,寻求一条解决问题的可行途径成为科学技术发展和人类社会进步的需要。不规则和不平坦的地形是这些环境的共同特点,使轮式机器人和履带式机器人(插入之前2篇文章链接)的应用受到限制。 在这种背景下,腿式机器人的研究蓬勃发展起,而仿生腿式机器

贪吃蛇撞墙功能的实现 和自动行走刷新地图 -- 第三十天
1.撞墙 1.1最初的头和尾指针要置为空,不然是野指针 1.2 在增加和删除节点后,判断是否撞墙,撞墙则初始话蛇 1.3在撞墙后初始化蛇,如果头不为空就撞墙,得定义临时指针指向头,释放头节点 2.自动刷新地图 2.1 在main函数中用while循环移动蛇,打印地图,用curses里面的refresh函数刷新地图 usleep()速度函数必须得包含头文件

技术随笔九——让我们慢慢地行走呵
朋友们: 大家好!工程是严谨的、工程是严肃的、工程的节奏是有条不紊的。然而今天我想手摇蒲扇、背靠竹摇椅,和大家一起观赏eclipse。他值得我们用一点时间来欣赏和交流。 大家来看几张影像: 大家看着上面的影像有什么感受呢?当我站在eclipse这扇窗前,我看到的是田野上活泼的生命、看到的是山岗上心灵的呼唤。插件式的
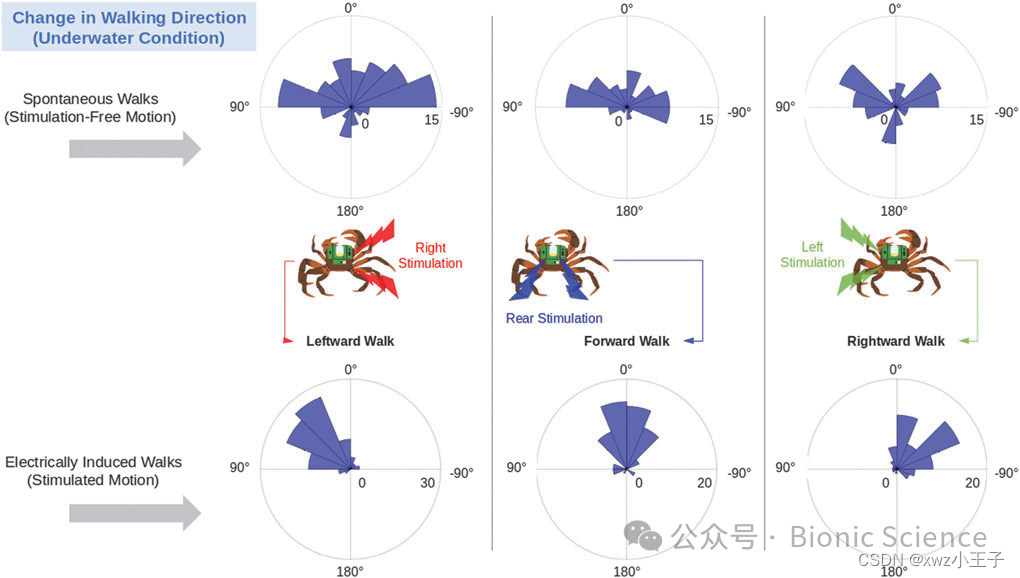
Soft Robotics:两栖环境下螃蟹仿生机器人的行走控制
传统水陆两栖机器人依靠轮胎或履带与表面的接触及摩擦产生推进力,这种对于表面接触的依赖性限制了现有水陆两栖机器人在低重力环境下(如水中)的机动性。利用生物自身的推进机制,人为激发生物运动行为,由活体生物与微机电系统组成的生物-机械混合系统为构建微小型水陆两栖机器人提供新思路。在广泛的生物载体中,螃蟹由于具有独特的步态,除此以外,螃蟹在水中使用鳃进行气体交换,使其可以在水下长期停留而不需浮到水面上,这
CompusBulider (模模搭)学习笔记7:3D场景中第一人称行走
1、 3D场景中的第一人称行走 2、 第一人称行走 3、 传送点 今天想要在数字孪生可视化3D场景中实现第一人称行走,以第一人称视角进入数字孪生可视化3D场景。 3D 相比2D的最大的优势,便是在于内容与形式上给人的真实感受。它比平面作品更直观,比 2D 更真实,所以更能给观看者以置身于环境当中的感受,大大增强说服力。3D 技术的发展甚至挑战观看者的分辨能力,使观看者的判断游离于与虚拟和现

基于51单片机,应用超声波、红外开关的自主行走小车
一、 设计任务 a.熟悉机器人的构造及组成,实现机器人按指令行走(前进,左转,右转,匀加速,匀减速,停止等) b.通过红外传感器触发,实现每次触发的时候运行状态的改变 c.通过超声波传感器测量距离,并且能够串口观察测量数据 d.根据超声波测量距离的不同实现运行状态的转换 e.利用红外传感器作为触发开关,利用超声波传感器测距,最终控制机器人在规划的场地内避开障碍物走遍整个场地。 二、模块使用 1.红

技术人员行走职场三大陷阱之 熟人借钱
分享一下我老师大神的人工智能教程!零基础,通俗易懂!http://blog.csdn.net/jiangjunshow 也欢迎大家转载本篇文章。分享知识,造福人民,实现我们中华民族伟大复兴! 版权声明:原创作品,允许转载,转载时请务必以超链接形式标明文章原始出版、作者信息和本声明。否则将追究法律责任。本文地址:<?xml:namespace prefix = o ns = "urn:s

2016-2017年度总结--行走在织梦的路上
recall 时光匆匆,上一次的半年总结如若昨日的此时,自己趴在电脑旁边回忆着这半年的点点滴滴。还是延续自己的习惯,每次写半年总结的时候都会把自己的最近的一次总结拿出来,这次也是老样子。回忆过去,畅想未来–2016下,点进来看看不一样的自己。 Do it 自考&软考 我想说我一定不是考霸,不过有一件事情令自己感动的是:不断的在试错中成长着。从第一次自考的大意
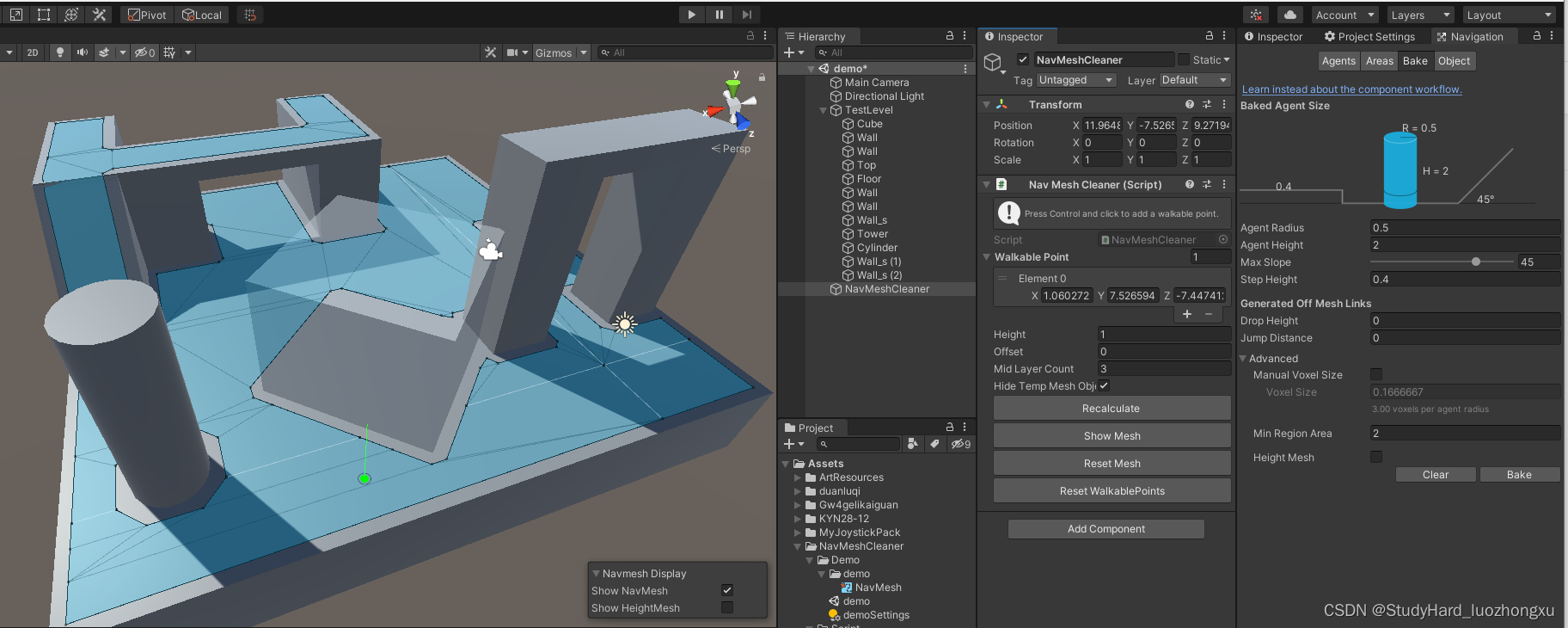
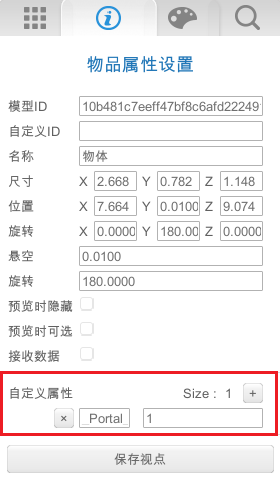
Unity NavMesh 清除不可行走区域
通常场景中物体设置为static或Navigation Static后,打开Navigation使用默认设置烘焙NavMesh,模型顶部和底部会出现蓝色网格,但其中有部分属于不可能到达区域,如下图 本文介绍两种可去掉NavMesh中不需要网格的方法: 方法一:设置去掉网格对应模型为不可行走区域,并调整模型使其不与地面重合 1.选中要去掉网格靠近模型 2.选择Navigation->

论文阅读:四足机器人对抗运动先验学习稳健和敏捷的行走
论文:Learning Robust and Agile Legged Locomotion Using Adversarial Motion Priors 进一步学习:AMP,baseline方法,TO 摘要: 介绍了一种新颖的系统,通过使用对抗性运动先验 (AMP) 使四足机器人在复杂地形上实现稳健和敏捷的行走。主要贡献包括为机器人生成AMP数据集,并提出一种教师-学生训练框架来学习稳健

明明颜值在线,偏靠一手代码行走江湖,这位奇女子还是V神嫡传 | 人物志
虽然久闻大名,但第一次见到Hsiao-Wei Wang却是在不久前的香港。 西铁线驶过人群鼎沸的尖东一路向西,在另一个大的人流交汇处荃湾的一个不大不小的会议酒店。以太坊核心开发者汇集于此,人们仰望的技术大牛,或者说精神支柱,依次上台。 Hsiao-Wei Wang也在其中,如果不算致辞,Hsiao-Wei Wang应该是第三位出场的嘉宾,与Karl Floersch同为「以太坊核心研究
为什么说激光SLAM是机器人自主行走不可绕过的核心?
随着人口红利消失、用人成本的加大,服务机器人相对人类成本明显更加低廉。在餐厅、酒店、商场、营业厅等场所,服务机器人正逐渐实现落地应用,让机器人代替人类的服务模式已屡见不鲜。 不同类型的服务机器人虽然外形不同,但大多都具备行走能力,相对而言,带有自主定位导航的服务机器人更受人们的青睐,通过激光导航或视觉导航等技术,机器人在无需人为操控的情况下也能实现自主行走。 激光SLAM是机器人自主行走
Cocos2d-x 地图行走的实现2:SPFA算法
本文乃Siliphen原创,转载请注明出处:http://blog.csdn.net/stevenkylelee 上一节《Cocos2d-x 地图行走的实现1:图论与Dijkstra算法》 http://blog.csdn.net/stevenkylelee/article/details/38408253 下一节《Cocos2d-x 地图行走的实现3:A*算
Cocos2d-x 地图行走的实现1:图论与Dijkstra算法
下一节《Cocos2d-x 地图行走的实现2:SPFA算法》: http://blog.csdn.net/stevenkylelee/article/details/38440663 本文乃Siliphen原创,转载请注明出处:http://blog.csdn.net/stevenkylelee 本文的实现使用的环境是:Cocos2d-x 3.2,VS2013
华为,15万大军孤独行走在世界上
华为,15万大军孤独行走在世界上 2015-09-11 06:54 阅读( 1900) 评论(3) 编辑删除 “一个民族,一个国家,一家企业的兴亡盛衰,关键在于组织中的个体与群体是否具备充沛的活力。活力是组织之魂,惰怠是组织之癌”。 华为的激情与活力是从哪里来的?利比亚战争期间利比亚代表处代表夏尊,带领他的团队,一直冒着炮火冲在第一线。他说:

Leetcode:874. 模拟行走机器人(贪心,行走模拟)
模拟行走机器人 机器人在一个无限大小的网格上行走,从点 (0, 0) 处开始出发,面向北方。该机器人可以接收以下三种类型的命令: -2:向左转 90 度 -1:向右转 90 度 1 <= x <= 9:向前移动 x 个单位长度 在网格上有一些格子被视为障碍物。 第 i 个障碍物位于网格点 (obstacles[i][0], obstacles[i][1]) 机器人无法走到障碍物上,它将会停

【HDU5807 BestCoder Round 86D】【分步式DP 状态转化】Keep In Touch 三人起点(i,j,k)保持联络条件下行走路径数
Keep In Touch Accepts: 22 Submissions: 280 Time Limit: 4000/2000 MS (Java/Others) Memory Limit: 262144/131072 K (Java/Others) 问题描述 在Byteland一共有nn个城市,编号依次为11到nn,同时有mm条单向道路连接着这些城市
行走职场,少拿同事当朋友
前文提到了《交朋友与找工作》,今天说说同事与朋友在职场上的关系。 同事,就是共同做事的人,属于我们社交圈子里的一员。 朋友,我个人认为就是那种需要时能在那儿的那个人。(我对敌人也是这么定义的,吼吼!) 这两者之间本没什么必然联系。但有很多误区,在此分享一下 误区一 同事都是朋友 我之前认识一个天津女孩儿,我