本文主要是介绍[论文笔记]二“Resouce Allocation and Service Provisioning in Multi-Agent Robotics: A Comprehensive Survey“,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
PS:Multi-Agent Cloud Robotics以下简称MACR。
一、摘要
机器人应用的广泛使用能提高操作自动化以及CPS系统的性能(包括工业4.0、智慧农业、智慧医疗、灾难管理)。但是,单个机器人的算力和存储能力有限,无法处理这些延迟敏感、数据密集型以及计算密集型的任务,因此多个机器人协同工作构建一个互补的环境同时利用边云资源处理大规模的应用可以解决以上问题。但随之而来的是,机器人的能耗率以及应用的执行成本的不同使得实现最优的资源分配方案成为一大困难。就上述问题,该篇论文在多智能体机器人环境下进行资源分配和服务提供相关论文进行充分研究,分类论述现有的资源分配方案、服务提供(资源池、计算卸载、任务调度)有哪些以及差异在哪,并提出自己认为最佳的框架以及未来研究的热点。
二、引言
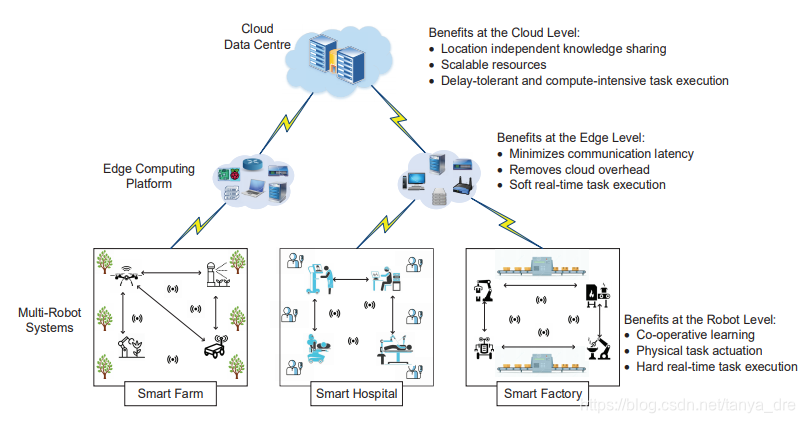
1、在CPSs中,最基本的要素就是机器人,是一个自治体,可以感知环境,做出智能决策并引发物理行为。单个智能体的计算能力是有限的,多个智能体构成协同的工作环境实现共同的目标。不同的机器人异构的能量容量难以保持持续的服务以及存储大量的数据,于是借助云与边端的资源,对机器人系统进行扩展。
2、因为云端与机器人之间的隔着多跳的距离,带来的传输延迟更大,边端离机器人更近,传输延迟更低、安全性更高,但计算资源有限。因此,我们将计算密集型的任务(比如天气预测)放到云端来执行,对于延迟敏感型(比如外科手术)的任务放置边端来完成。
3、MACR与相关范例MEC(移动边缘计算)、MCC(移动云计算)的对比。

4、资源分配:为请求的应用分配合适的资源。服务提供通过资源池、计算卸载为资源分配奠定基础以及协助任务调度。
5、资源分配与服务提供的相关挑战与要求:
1)在MACR中要求为请求的应用进行严格的分类(比如是计算密集型还是延迟敏感性等)并选择兼容的资源。
2)MACR中要求机器人具有多种编程模型以处理复杂的数据流。
3)动态的机器人协作,完成共同的目标。在通信不佳的工作环境下,机器人—机器人(端/云)之间通信受阻,机器人不能上传数据,于是就需要联合学习或分布式机器学习的方法,但这回增加额外的资源管理费用。
4)跨基础设施的互操性:因为MACR系统里涉及到机器人、边和云端的基础设施,其计算资源存在异构性以及分布式。而这些在MCC/MEC中,RP(资源提供商)都是一致的。
5)同步决策:因为涉及来自不同通信层的计算基础设施来执行机器人应用,在多个决策实体之间同步变得尤其重要。
6)在MACR中,机器人具有移动的特性。要实现卸载计算的过程中机器人不确定的移动性与服务点的无缝交互会增加额外的通信时间。所以要对计算和通信做出权衡。
7)安全性和可靠性。因为在MACR中,涉及到R-R/C/E的资源互享性,暴露的数据点数量很多,使得其很容易在通信层次上成为攻击的目标。
这篇关于[论文笔记]二“Resouce Allocation and Service Provisioning in Multi-Agent Robotics: A Comprehensive Survey“的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






