相位专题

人体行走步态周期转换为不同相位描述
目录 一、步行周期 二、相关论文描述 三、参考文献 一、步行周期 人体行走时的步态状态通常采用传感器进行判断,比如Dong Jin Hyun等[1]通过嵌入两个力感应电阻的鞋垫来估计的步行状态,其中一个检测脚趾接触,另一个检测脚后跟接触[5]。Conor James Walsh[3]基于外骨骼的角度和力传感器读数,实现了状态机控制策略。上述论文都是将连续步态离散化

【MATLAB源码-第253期】基于matlab的8PSK调制载波+相位+符号定时联合估计仿真,输出星座图等。
操作环境: MATLAB 2022a 1、算法描述 1. 系统背景和目标 8PSK是一种调制方式,其中信号的相位被分成8个不同的状态,每个状态代表3比特的数据。这个过程涉及将比特序列转换为相应的相位,经过调制后传输给接收端。在接收端,由于信号通过信道传播过程中可能受到噪声、频偏、符号定时偏差等因素的影响,接收到的信号相对于原始信号会有一定的失真。因此,接收端需要进行一系列处理来恢复原始数据

相位一致性——利用频域检测边缘
相位一致性——利用频域检测边缘 一、相位一致性提出的背景 相位一致性的提出是基于科学家发现了人感觉图像的关键不在于图像的长度差或者高度差之类的因素,关键在于图像信号的相位大小,例如人知道一个方波的边缘,并不是因为方波边缘有高度差,因为即使方波的高度差很小,但是人眼仍然能够看到边缘,相反有些情况下,方波的高度比较大但是人却看不出!科学家曾做过相关实验:将一副图像进行傅里叶变换,之后将频谱图中所有


相位解包裹(二)相位解包裹的难处
上一篇文章讲了一维相位解包裹,Itoh方法可以总结为 :连续相位可以通过累加截断相位的差值的截断而求得,也就是表示为下面的式子 从理论和逻辑上看,一维相位解包裹都不复杂,这里就接着上文,讨论从一维推广到二维相位解包裹,到底出了什么问题导致这个问题变得至今都没有完美的解决方法。 二维相位解包裹 根据Itoh方法,可以将一维相位解包裹推广到二维相位解包裹中,可以用以下式子来表示:

相位解包裹(一)一维相位解包裹
答辩结束了,可以接着更新啦~~~ 前几篇文章已经写过FTP和PMP两种相位提取的方式,相位提取这一步基本都是固定的了,只要利用正弦条纹结构光做三维测量,这一步不管怎么玩,都基本不脱离FTP或者PMP,当然目前PMP的使用频率更高。 但是,提取相位后的下一步,应该是结构光三维重建非常重要的一步,在我看来,说是最重要的也不为过,就是相位解包裹。 首先我们先讨论什么是相位解包裹。 相


GPS从入门到放弃(二十三) --- 相位缠绕
GPS从入门到放弃(二十三) — 相位缠绕 相位缠绕(Phase Wind-Up)是发射端与接收端之间的相对运动导致的载波相位变化。对 GPS 系统来说,因为 GPS 卫星发送的是右旋圆极化(RHCP: Right Hand Circularly Polarized)的信号,在这种情况下,接收机或者卫星天线的旋转会导致载波相位发生改变,这个值可能达到一个载波周期,我们把这种现象叫做相位缠绕。
Jitter 和相位噪声
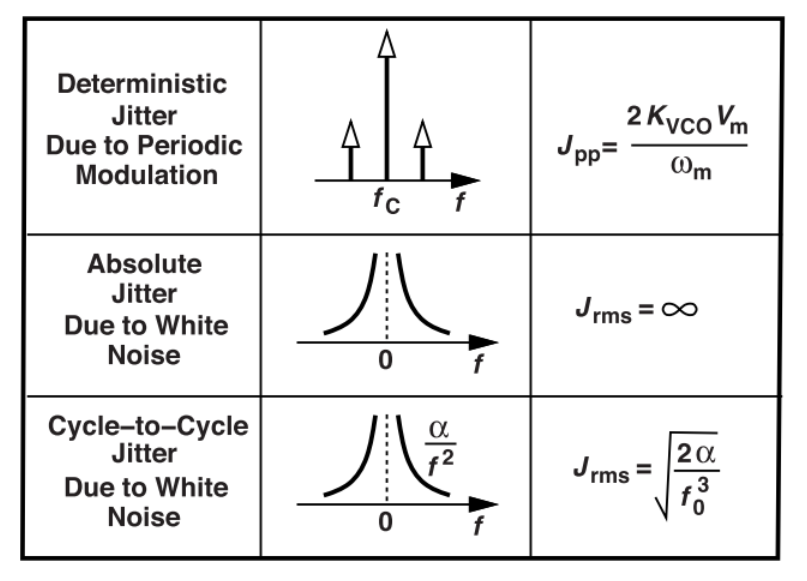
近期学习PLL的时候,发现里面有诸多jitter类型,绕晕了,写个帖子记录一下学习过程。 目录 基本jitter和相噪概念 jitter 相位噪声 相位噪声和jitter之间的联系 三种常见的抖动类型及其特点 基本jitter和相噪概念 无噪声振荡器的输出是一个完全周期性的,如图a,其包含三个特点:1.周期不随时间变化2.瞬时频率不随时间变化3.在t=nT/2时均匀的发生过

PCG 梯度共轭(加权的DCT相位展开)相位解包裹 matlab 过程解析-加权最小二乘相位展开技术
1.代码 % check if the weight has the same size as psiif (~all(size(weight) == size(psi)))error('Argument error: Size of the weight must be the same as size of the wrapped phase');end%论文(公式 15)中的矢量 b
spi cpol极性和cpha相位
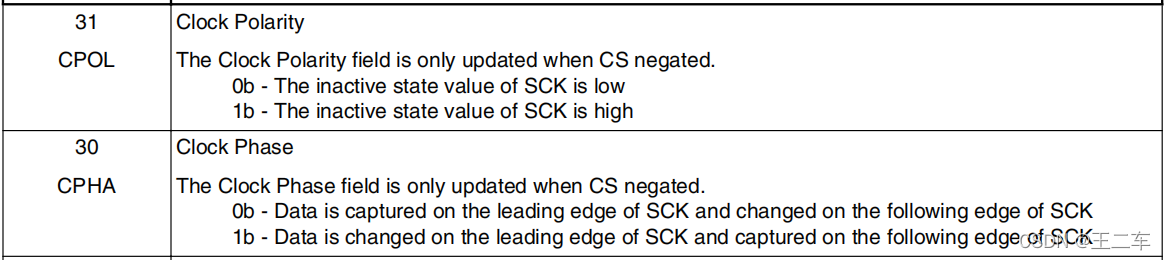
在spi通信中,需要设置cpol极性和cpha相位,保持master和slave两端时钟一致,相互匹配才能正常通信。主要原因是spi没有握手信号不可靠传输。 参考文章:高手带你理解SPI中的极性CPOL和相位CPHA 名词解释 CKPOL (Clock Polarity) = CPOL = POL = Polarity = (时钟)极性

PCG共轭梯度最小二乘相位解包裹-matlab(可直接运行)
phase_unwrap.m %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 根据Ghiglia和Romero(1994)提出的方法,基于加权和非加权最小二乘法进行相位解包裹% 链接:https://doi.org/10.1
不同质量图在卡尔曼滤波相位解缠中应用探讨
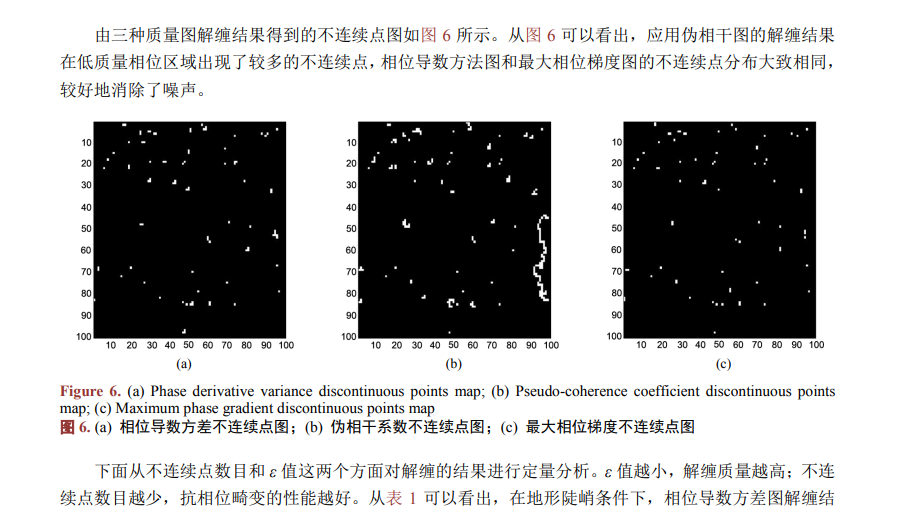
文献来源:不同质量图在卡尔曼滤波相位解缠中应用探讨 闫 满,郭春华 测绘科学技术, 2019, 7(2), 65-73 卡尔曼滤波将相位解缠转化为状态估计问题,实现相位解缠与噪声消除的一并处理。通过建立相位的动 态方程和观测方程来求解真实相位,在常规方法中观测方程的噪声方差由相干图的值来确定。本文采用三种不同质量图的值来确定噪声方差,实施扩展卡尔曼滤波相位解缠算法。分别在地形平坦和陡峭两种 条件

【MATLAB源码-第185期】基于matlab的16QAM系统相位偏移估计EOS算法仿真,对比补偿前后的星座图误码率。
操作环境: MATLAB 2022a 1、算法描述 1. 引言 M-QAM调制技术的重要性 现代通信系统追求的是更高的数据传输速率和更有效的频谱利用率。M-QAM调制技术,作为一种高效的调制方案,能够通过在相同的带宽条件下传输更多的数据位来满足这一需求。M-QAM通过调整信号的幅度和相位来编码信息,使得每个符号能够携带多个比特信息,从而大幅度提高了数据传输速率。 相偏的影响 然而,M

【图像加密】基于matlab GUI双随机相位编码光学图像加密解密【含Matlab源码 1633期】
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。 🍎个人主页:海神之光 🏆代码获取方式: 海神之光Matlab王者学习之路—代码获取方式 ⛳️座右铭:行百里者,半于九十。 更多Matlab仿真内容点击👇 Matlab图像处理(进阶版) 路径规划(Matlab) 神经网络预测与分类(Matlab) 优化求解(Matlab) 语音处理(Matlab
二维相位解包理论算法和软件【全文翻译- 加权最小二乘相位解包裹-PCG(5.4)】
5.4 加权最小二乘相位 与路径跟踪法不同,最小二乘法不直接处理残差问题,因为它们是通过对残差进行积分以最小化梯度差来求解的。另一方面,加权最小二乘法使用预先确定的权重(如质量图)来避免通过残差积分。选择权重的目的是以某种方式适应残差,隔离低信噪比区域,或对所需解决方案施加其他属性或偏好。然而,在大多数情况下,没有充分考虑残差问题的最小二乘法求解结果并不理想。在第 5.3.4 节中,我们发现未考
二维相位解包裹理论算法和软件【全文翻译-掩膜切割算法(4.4)】
4.4 掩膜切割算法 在上一节中,我们了解到质量引导路径跟踪算法可以解决一些相位解包问题,而在这些问题上,戈尔茨坦算法会因为分支切割的错位而失败。这是因为质量引导方法采用了更多的信息(质量图)来引导解包路径。在本节中,我们将这一想法与戈尔茨坦算法相结合,产生了一种 "混合 "算法,它使用质量图来引导分支切割的位置。由此产生的算法结合了两种算法的优点:除了残基数据外,还利用了额外的信息来指导解包过

二维相位解包理论算法和软件【全文翻译- 残差、梯度和相分解:示例 (2.72.8)】
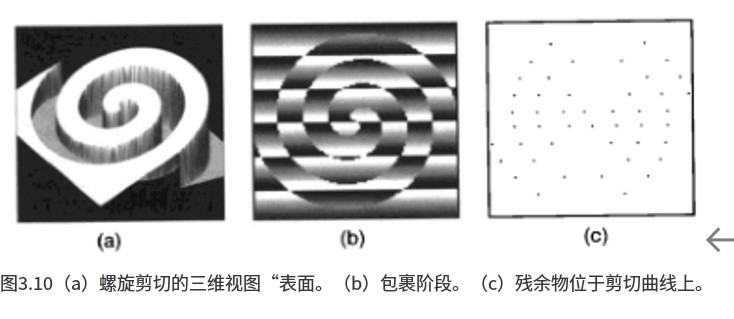
2.7 残差、梯度和相分解:示例 观察第 2.3 节中提出的局部相位特性如何应用于现实世界是很有启发性的。我们将借助第 2.4 节中的亥姆霍兹分解定理来实现这一点。图 2.7(a)描述了一个 512×512 像素的包裹相位函数,它是实际应用中可能遇到的典型相位函数。请注意,有几条边缘线似乎是 "凭空 "产生或终止的,就像图 2.2(a) 或图 2.3(a) 中的边缘线一样。如图 2.7(b)所示
相位导数方差计算-matlab
%% 下面计算 相位导数方差% 假设 phase_map 是你的相位图二维矩阵% K 是窗口的大小k = 3; % 请使用实际的窗口大小替换% 计算 x 和 y 方向的偏导[dx, dy] = gradient(wrappedPhase);Ksq = k^2; % 计算 K^2half_k = floor(k / 2);% 初始化结果矩阵result = zeros(size(wra
二维相位解包理论算法和软件【全文翻译-路径跟踪方法(4.1)】
4.1 引言 在第 2 章中我们注意到,从一个像素点开始计算的解包相位可能取决于积分路径。如果我们沿着两条不同的路径从一个像素点到另一个像素点,我们可能会得到两个不同的解包裹相位答案。我们发现,这些不一致是由称为残差的点状结构造成的。残差位于由四个像素组成的 "环路 "中的某处,在这个环路中,相位导数的积分(即包裹相位差之和)不是零,而是 2π 或 2π。按照惯例,如图 2.5 和图 2.6 所
二维相位解包理论算法和软件【全文翻译- 质量分布图(3.3)】
在本节中,我们将定义几个在相位解包中非常有用的质量映射。质量图是定义给定相位数据中每个像素质量或好坏的数值数组。它们对于指导第 4 章将要介绍的几种路径跟踪算法是必要的,对于第 5 章将要介绍的一些加权 L^P-norm 算法也是必要的。 我们要讨论的第一个质量图是相关图,它由从 IFSAR 数据中提取的相关系数定义。在没有相关图的情况下,可以单独从相位数据中得出其他质量图。 第

二维相位解包理论算法和软件【全文翻译-将相位分解为 “非旋转 “和 “旋转 “(2.4)】
2.4 将相位分解为 "非旋转 "和 "旋转 "部分 借用电磁场理论,可以用发散和卷曲来指定矢量场[9][10]。当且仅当矢量函数 F(r)(以及由其描述的场)在整个域 D 中不旋转或无旋转时,我们称之为矢量函数 F(r)、 因此,如果等式 2.30(也是第 2.2 节关于路径独立性的条件 4)为真,那么 F(r)=φ(r) ,因此 φ(r) 是自由旋转的。换句话说,φ(r) 在 D 的
CY2300相位对齐时钟乘法器
这份文件是关于Cypress Semiconductor Corporation生产的CY2300型号的Phase-Aligned Clock Multiplier(相位对齐时钟乘法器)的技术手册。以下是该文件的核心内容概述: 产品特性: 4倍频输出配置。单一锁相环(PLL)架构。相位对齐功能。低抖动、高准确度输出。输出使能引脚。支持3.3V操作电压。5V容忍度输入。内部环路滤波器。8引脚15