trajectory专题

【轨迹规划论文整理(1)】UAV轨迹规划的开山之作Minimum Snap Trajectory
【轨迹规划论文整理(1)】UAV轨迹规划的开山之作Minimum Snap Trajectory Generation and Control for Quadrotors 本系列主要是对精读的一些关于无人机、无人车的轨迹搜索论文的整理,包括了论文所拓展的其他一些算法的改进思路。 这是本系列的第一篇文章,也是UAV轨迹规划的开山之作,是所有学习无人机方向的需要精读的第一篇文章,两个作者来自于宾夕

轨迹规划论文阅读20220109-A Real-Time Motion Planner with Trajectory Optimization for Autonomous Vehicles
0、摘要 提出了一种基于轨迹优化的高效实时自动驾驶运动规划方法。将轨迹空间离散化->利用cost functions 来找到最佳轨迹。 引[CSDN1]: 规划器首先把规划空间离散化 ,并根据一组代价函数搜索最优轨迹,然后对轨迹的path和speed进行迭代优化。文中提出了一种“post-optimization”的方法,可以弥补离散化难以求出最优解的问题(离散越密,越接近最优解),
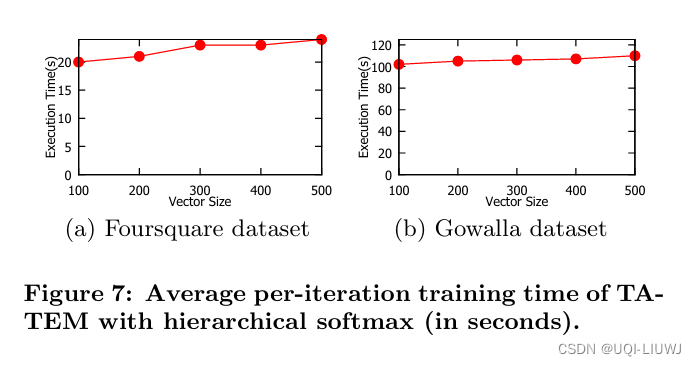
论文笔记:ATime-Aware Trajectory Embedding Model for Next-Location Recommendation
Knowledge and Information Systems, 2018 1 intro 1.1 背景 随着基于位置的社交网络(LBSNs),如Foursquare和Facebook Places的日益流行,大量用户签到数据变得可用 这些大量签到数据的可用性带来了许多有用的应用,以提升基于位置服务的用户体验其中一个任务是新兴的下一个位置推荐下一个位置推荐根据用户过去的签到记录,预测可能

从硬件角度看操作系统发展轨迹——From a hardware perspective operating system trajectory
操作系统理论是在计算机的应用中诞生并成长的,它的发展与计算机硬件的发展是密不可分的。下表是从硬件角度看操作系统的发展轨迹。 年 代 硬 件 特 点 操作系统特点 背 景 机械计算机时代(17世纪~20世纪初) ① 纯机械结构,低速 ② 只能进行简单的数学运算 纯手工操作 从计算尺到差分机再到分析机发展了数百年 第一代计算机(1946年

Geometrically Constrained Trajectory Optimization for Multicopters 论文分析
这篇论文题目为"针对多旋翼飞行器的几何约束轨迹优化方法"(Geometrically Constrained Trajectory Optimization for Multicopters),主要讲了一种高效求解多旋翼无人机在复杂环境下轨迹规划问题的优化框架。 1. 引言 多旋翼无人机要实现自主导航,需要能够在复杂环境中快速规划出安全且动力学可行的轨迹。但现有的轨迹规划方法在求解质量、计算效

Tracing the technological development trajectory in post-lithium-ionbattery technologies
摘要: 首先,根据客观数据,我们确定了后锂离子电池技术目前的研究趋势和前景,帮助研发规划者确定其进一步的研发方向。对后锂离子电池技术发展轨迹的探索,可以为相关研究人员更好地了解动态和战略调整提供参考,对清洁能源和绿色化学的发展具有深远的意义。 其次,它发现了交互知识领域的动态,这表 明技术收敛的趋势增加。在锂空气和锂硫电池的情况下,观察到有关核心电池组件
Google视觉机器人超级汇总:从RT、RT-2到AutoRT、SARA-RT、RT-Trajectory
前言 随着对视觉语言机器人研究的深入,发现Google的工作很值得深挖,比如RT-2 想到很多工作都是站在Google的肩上做产品和应用,Google真是科技进步的核心推动力,做了大量大模型的基础设施,服 故有了本文,单独汇总Google在机器人领域的重大结果、进展 第一部分 从RT-1到RT-2 1.1 RT-1 RT-1(项目地址:https://robotics-tran
Trajectory Rollout planner initialized with param meter_scoring not set.
警告: Trajectory Rollout planner initialized with param meter_scoring not set. Set it to true to make your settings robust against changes of costmap resolution. 未设置使用参数meter_scoring初始化的轨迹卷展栏规划器。将

行人轨迹论文阅读SSAGCN: Social Soft Attention Graph Convolution Network for Pedestrian Trajectory Prediction
SSAGCN: Social Soft Attention Graph Convolution Network for Pedestrian Trajectory Prediction SSAGCN:用于行人轨迹预测的社会软注意力图卷积网络 Abstract- 行人轨迹预测是自动驾驶的一项重要技术,近年来已成为研究热点。为了准确预测行人未来的合理轨迹,不可避免地要同时考虑行人之间的社交互动和周围

行人轨迹论文:STUGCN:A Social Spatio-Temporal Unifying Graph Convolutional Network for Trajectory Predictio
STUGCN:A Social Spatio-Temporal Unifying Graph Convolutional Network for Trajectory Prediction用于轨迹预测的社会时空统一图卷积网络 Abstract-动态场景中交互代理的轨迹预测,也称为轨迹预测,是许多应用的关键问题,包括机器人系统和自动驾驶。由于行人之间的复杂交互,该问题提出了重大挑战。为了预测未来的
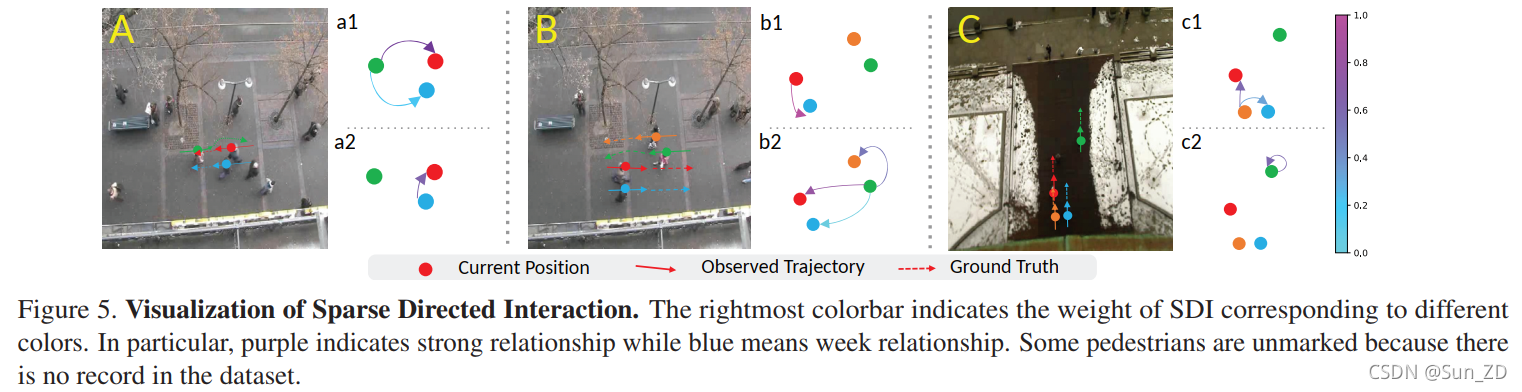
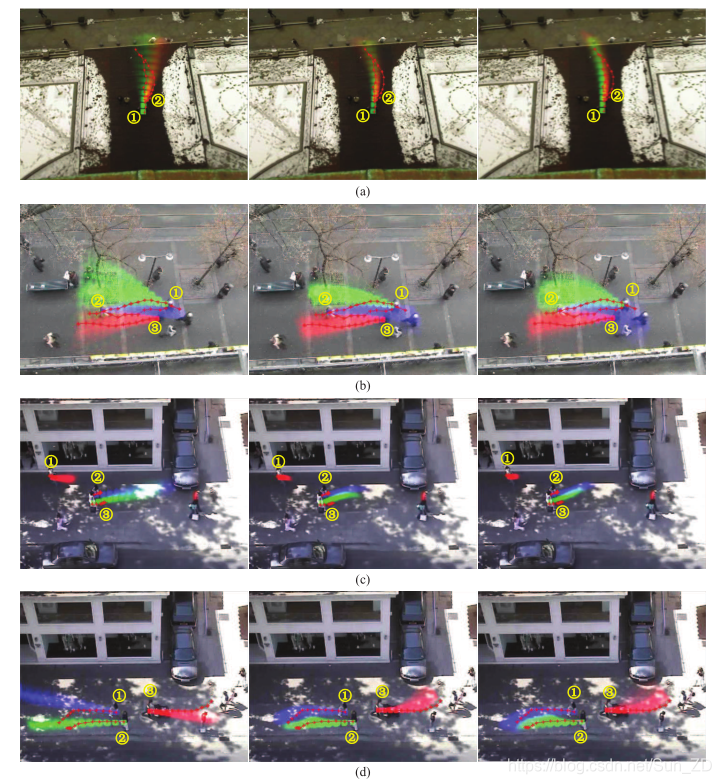
论文翻译 SGCN:Sparse Graph Convolution Network for Pedestrian Trajectory Prediction 用于行人轨迹预测的稀疏图卷积网络
SGCN:Sparse Graph Convolution Network for Pedestrian Trajectory Prediction 用于行人轨迹预测的稀疏图卷积网络 行人轨迹预测是自动驾驶中的一项关键技术,但由于行人之间复杂的相互作用,该技术仍具有很大的挑战性。 然而,以往基于密集无向交互的研究存在建模冗余交互和忽略轨迹运动趋势等问题,不可避免地与实际存在较大偏差。 针对这些问
论文阅读:A Novel Graph based Trajectory Predictor with Pseudo Oracle
A Novel Graph based Trajectory Predictor with Pseudo Oracle 摘要1 引言2 相关工作3 PROPOSED METHODIV. EXPERIMENTAL RESULTSV. CONCLUSION AND DISCUSSION 带有 Pseudo Oracle的新型基于图的轨迹预测器 作者:Biao Yang, Guoch
![[论文阅读笔记21]Quo Vadis: Is Trajectory Forecasting the Key Towards Long-Term Multi-Object Tracking?](https://img-blog.csdnimg.cn/61dd20e7363f41bfa5fbf5da1a2eb9f4.png)
[论文阅读笔记21]Quo Vadis: Is Trajectory Forecasting the Key Towards Long-Term Multi-Object Tracking?
这篇文章是少有的根据轨迹预测来做MOT的文章. 论文链接: https://arxiv.org/pdf/2210.07681.pdf 代码: https://github.com/dendorferpatrick/QuoVadis 1. Abstract 长时跟踪是一个经常被忽略的问题. 对于大于三秒钟的轨迹丢失, SOTA的跟踪器中只能恢复不到10%的轨迹. 轨迹丢失的时间越长,
Quo Vadis_Is Trajectory Forecasting the Key 论文笔记
主要解决长期跟踪问题 研究动机:在更长的时间范围内对未来轨迹进行推理 Introduction 首先说明,目前方法已经在短期预测、可见物体跟踪方向上取得成功。 用数据+图说明,长遮挡时,跟踪成功率(ID recall率)显著降低(问题引入) (读一下这篇引用 Donald B Reid. An algorithm for tracking multiple targets. In Tra
python 笔记 :trajectory_distance包(如何可以正确使用)【debug篇】
包的地址:maikol-solis/trajectory_distance (github.com) 1 模块介绍 用Cython实现的Python模块,用于计算二维轨迹之间的距离 trajectory_distance包提供了9种轨迹间的距离计算方法: SSPD(对称线段路径距离)OWD(单向距离)HausdorffFrechet离散FrechetDTW(动态时间规整)LCSS(最长公共
Action Recognition with Trajectory-Pooled Deep-Convolutional Descriptors
Action Recognition with Trajectory-Pooled Deep-Convolutional Descriptors 这篇文章提出了一种新的视频表示方法,叫做trajectory-pooled deep-convolutional descriptor(TDD)。他拥有手工设计的特征和深度学习的特征的优点。用深度结构来学习有区分的卷积特征映射。然后用轨迹控制的po
Online Quadrotor Trajectory Generation and Autonomous Navigationon Point Clouds 点云上的在线四旋翼轨迹生成和自主导航
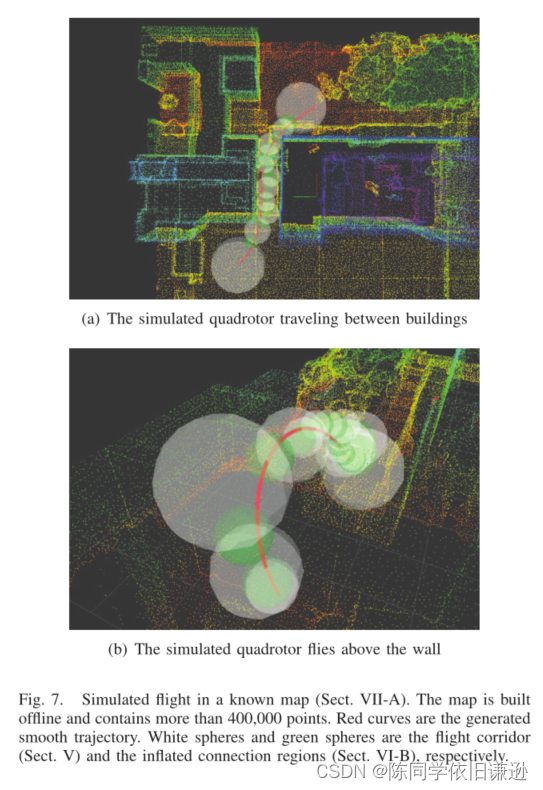
点云上的在线四旋翼轨迹生成和自主导航 摘要 在本文中,我们提出了一种直接在点云上在线生成自主四旋翼飞行安全轨迹的框架。考虑到四旋翼机在未知环境中运行,我们使用三维激光测距仪进行状态估计,同时构建环境的点云图。基于增量构建的点云地图,我们利用KD树中快速最近邻搜索的特性,采用基于采样的路径查找方法,在三维空间中生成具有安全保障的飞行走廊。然后使用在二次约束二次规划(QCQP)中制定的轨迹生成方法
【单目标轨迹预测】TNT: Target-driveN Trajectory Prediction(翻译+笔记)
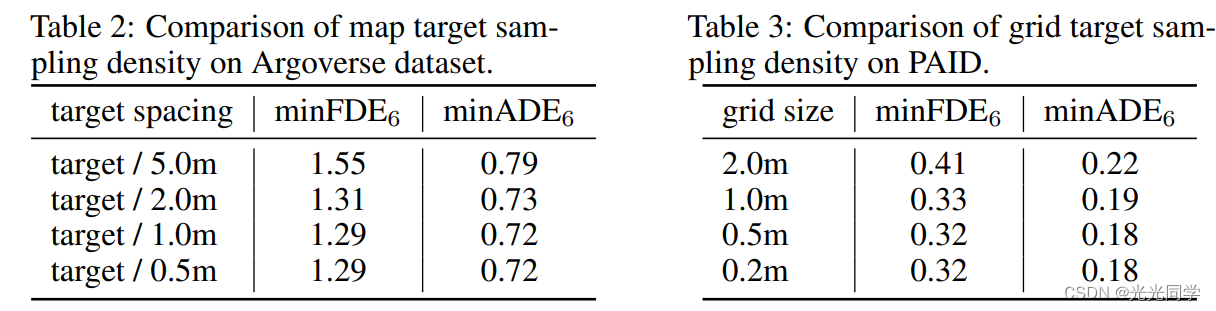
摘要 问题: 智能体未来的行为意图难以预测且是多模态性的。思路:在中等时间步长的预测中,目标未来的模式可以通过一组目标状态来有效的捕获方法:第一步,通过编码智能体与环境和其他智能体的交互,来预测智能体未来T步长可能的目标状态;第二步,生成以目标为条件的轨迹状态序;第三步,估计轨迹可能性和最后选择一个紧凑的轨迹预测集。区别:(1)之前的工作将智能体意图建模为潜在变量,并依赖于测试时间采样来生成不同
论文笔记:AttnMove: History Enhanced Trajectory Recovery via AttentionalNetwork
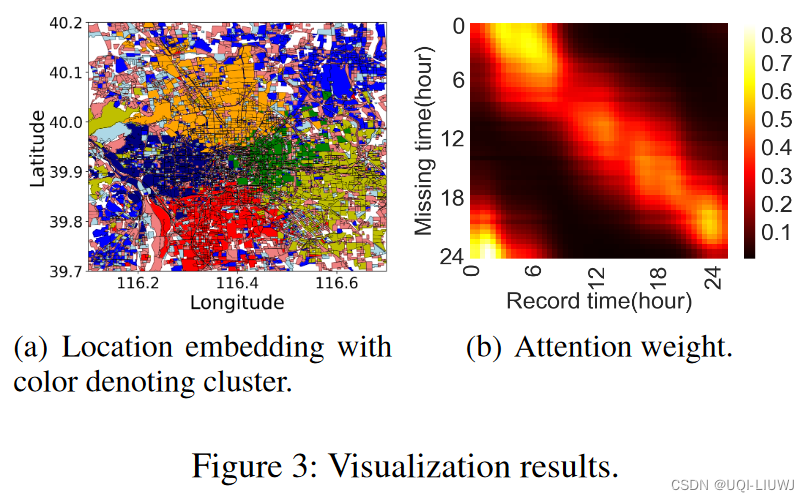
AAAI 2021 1 intro 1.1 背景 将用户稀疏的轨迹数据恢复至细粒度的轨迹数据是十分重要的恢复稀疏轨迹数据至细粒度轨迹数据是非常困难的 已观察到的用户位置数据十分稀疏,使得未观察到的用户位置存在较多的不确定性真实数据中存在大量噪声,如何有效的挖掘周期性规律存在一定困难经常在历史轨迹中被访问的地点并不一定会是目标时间窗缺失的地点,如何利用用户历史上的位置数据是另一个挑战 1.2
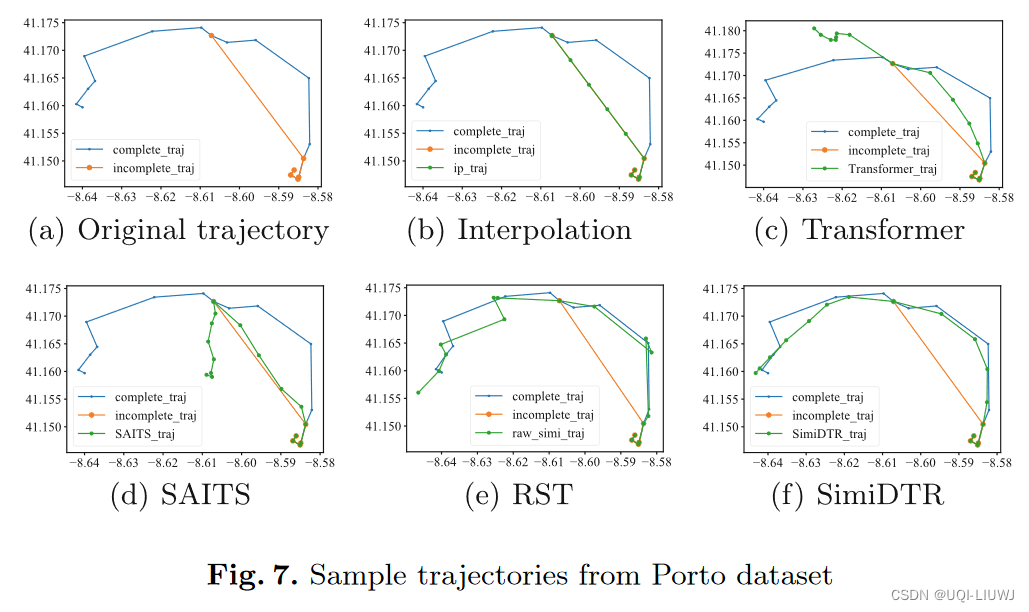
论文笔记:SimiDTR: Deep Trajectory Recovery with Enhanced Trajectory Similarity
DASFFA 2023 1 intro 1.1 背景 由于设备和环境的限制(设备故障,信号缺失),许多轨迹以低采样率记录,或者存在缺失的位置,称为不完整轨迹 恢复不完整轨迹的缺失空间-时间点并降低它们的不确定性是非常重要的一般来说,关于轨迹恢复的先前研究可以分为两个方向 第一个方向:模拟用户在不同位置之间的转换模式,以预测用户的缺失位置 本质上是一个分类任务,恢复的轨迹通常由位置或POI组成
![[ERROR]: Action client not connected:***/arm_trajectory_controller](https://img-blog.csdnimg.cn/d01c238ab8384fc1b6f1a9f028afd566.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAVGVwbW9l,size_20,color_FFFFFF,t_70,g_se,x_16)
[ERROR]: Action client not connected:***/arm_trajectory_controller
这里写自定义目录标题 出现原因解决方法方法1.修改moveit_config方法2 控制器名字修改 出现原因 Moveit配置机械臂时,点的是自动配置ROS Control,配置的名字会是group名字加上_controller。也就是下面的名字没有中间的trajectory(下面是我已经修改过的,用的是第一种方法),我在Planning Groups里创建了两个group,分

Trajectory-guided Control Prediction for End-to-end Autonomous Driving论文学习
1. 解决了什么问题? 端到端自动驾驶方法直接将原始传感器数据映射为规划轨迹或控制信号,范式非常简洁,从理论上避免了多模块设计的错误叠加问题和繁琐的人为规则设计。当前的端到端自动驾驶方法主要有两条独立的研究路线,要么基于规划轨迹来运行控制器,要么直接预测控制信号。端到端模型的预测输出一般有两种形式:轨迹/路径点和直接控制动作。但是,至于哪一种更好仍没有定论。 预测控制信号可以直接用于车辆上,而
【论文阅读笔记】Traj-MAE: Masked Autoencoders for Trajectory Prediction
Abstract 通过预测可能的危险,轨迹预测一直是构建可靠的自动驾驶系统的关键任务。一个关键问题是在不发生碰撞的情况下生成一致的轨迹预测。为了克服这一挑战,我们提出了一种有效的用于轨迹预测的掩蔽自编码器(Traj-MAE),它能更好地代表驾驶环境中智能体的复杂行为。 具体来说,我们的Traj-MAE采用了多种掩蔽策略来预训练轨迹编码器和地图编码器,允许捕获智能体之间的社会和时间信息,同时利

【论文翻译】TNT: Target-driveN Trajectory Prediction
文章目录 1. 前言2. 相关工作3. 公式4. 目标驱动轨迹预测4.1 场景背景编码4.2 目标预测4.3 目标条件运动估计4.4 轨迹评分和选择4.5 训练和推理细节 5. 实验5.1 数据集5.2 实现细节5.3 消融研究 TNT:目标驱动的轨迹预测 摘要: 预测移动代理的未来行为,对于现实世界的应用至关重要。这是具有挑战的,因为代理的意图和相应的行为是未知的并且

ACM综述:Trajectory Outlier Detection: Algorithms, Taxonomies, Evaluation, and Open Challenges
摘要 回顾轨迹异常处理(TOD)的算法基于应用,output,算法层面上的分类算法在小中大数据集上的表现挑战,和待解决的问题 introduction 1.1 Review works 这篇文章关于异常处理的深度学习算法 Raghavendra Chalapathy and Sanjay Chawla. 2019. Deep learning for anomaly detection: A
文献及代码阅读报告 - SS-LSTM:A Hierarchical LSTM Model for Pedestrian Trajectory Prediction...
概览 简述 SS-LSTM全称Social-Scene-LSTM,是一种分层的LSTM模型,在已有的考虑相邻路人之间影响的Social-LSTM模型之上额外增加考虑了行人背景的因素。SS-LSTM架构类似Seq2Seq,由3个Encoder生成的向量拼接后形成1个Decoder的输入,并最终做出轨迹预测,有关Encoder和Decoder具体细节下文介绍。 主要结论与贡献 提出了SS-LSTM