本文主要是介绍[ERROR]: Action client not connected:***/arm_trajectory_controller,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
这里写自定义目录标题
- 出现原因
- 解决方法
- 方法1.修改moveit_config
- 方法2 控制器名字修改
出现原因
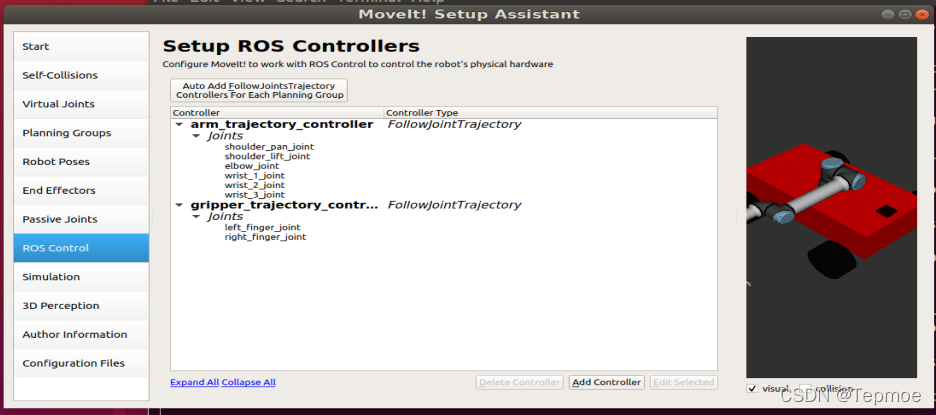
Moveit配置机械臂时,点的是自动配置ROS Control,配置的名字会是group名字加上_controller。也就是下面的名字没有中间的trajectory(下面是我已经修改过的,用的是第一种方法),我在Planning Groups里创建了两个group,分别是arm和gripper。
我实际配置的控制器在config/arm_controller中(每个人路径不一样,看你launch文件load的是哪个配置文件),我配置的控制器名字如下:
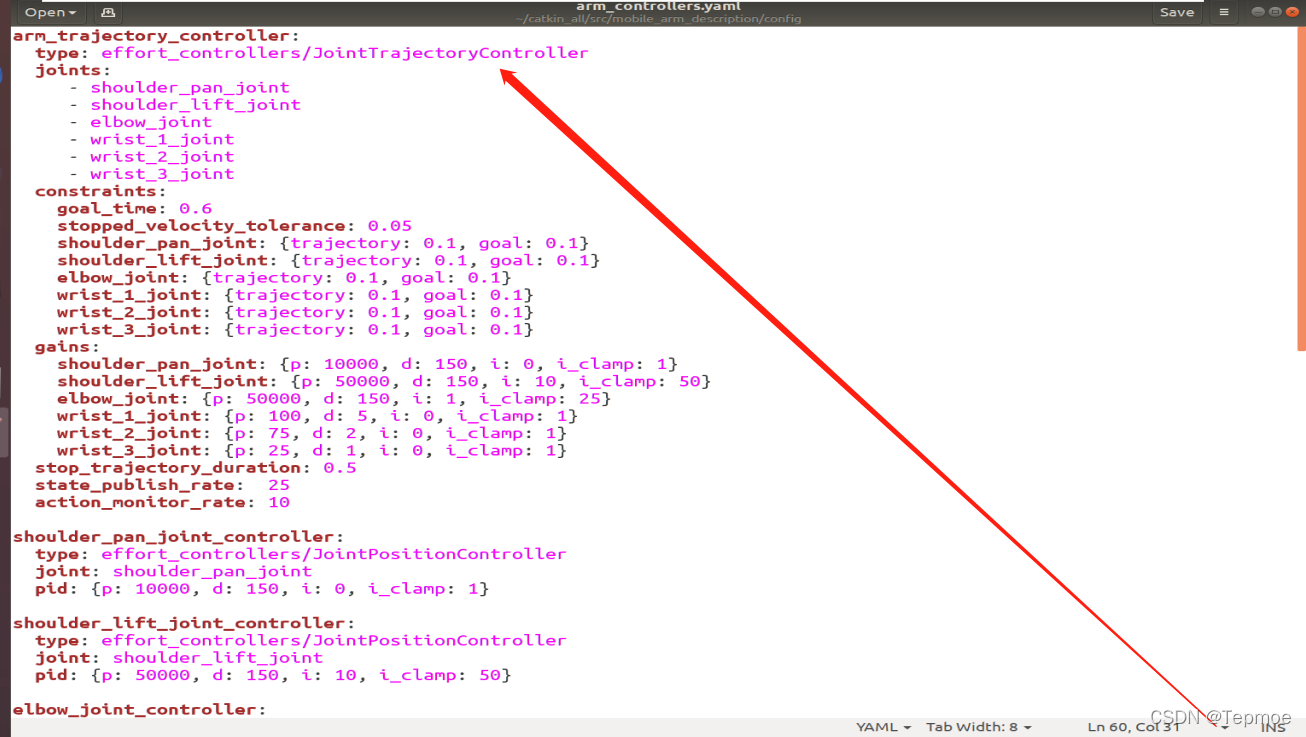
名字不一样导致出问题,无法加载。
解决方法
方法1.修改moveit_config
点开配置生成的moveit_config/config/ros_controllers.yaml,把名字改成自己的。
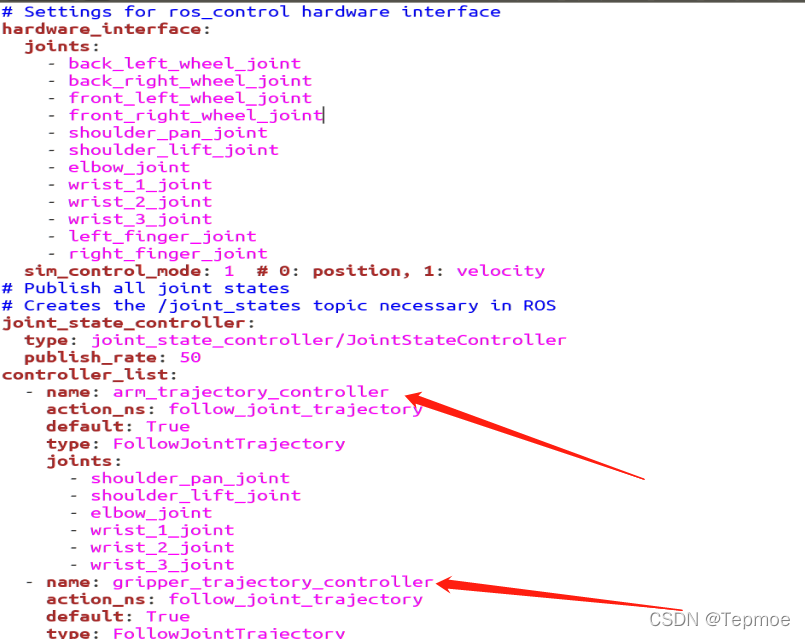
方法2 控制器名字修改
launch中加载的控制器的名字改成group名+controller即可。
这篇关于[ERROR]: Action client not connected:***/arm_trajectory_controller的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



