lecture专题

【UCB CS61C】Lecture 2 3 - C Basics
目录 C 语言的编译(Compilation)变量类型(Variable Types)字符(Characters) C 语言的类型转换(Typecasting)类型函数(Typed Functions) 结构体(Structs)成员的对齐与填充(Alignment & Padding)节省结构体对齐填充的空间 联合体(Unions)`main()` 函数True or False?指针(Po
MEMS:Lecture 18 Feedback
讲义 Linear feedback MEMS热板 Hotplate MEMS(微机电系统)热板是现代气体传感器的重要组成部分。它们通过加热一种活性材料来工作,这种材料与气体发生反应,从而改变其电阻。电阻的变化可以用来检测和测量特定气体的存在和浓度。 MEMS热板通常由以下几个部分组成: 加热元件:通常是由薄金属膜(如钛/钛氮化物)构成的螺旋形加热器。这些加热器被设计成能够快速且均匀
智能数据分析(1)Lecture 6-8b
Lecture 6: Generative Models 生成模型 vs 判别模型 判别模型(Discriminative Models) 判别模型的主要任务是直接学习输入 x x x 和类别 y y y 之间的关系。它们不关心数据的生成过程,而是直接估计类别的边界。 定义:判别模型直接学习 p ( y ∣ x ) p(y|x) p(y∣x),即在给定输入 x x x 的情况下,属

【计算机视觉】Lecture 22:相机运动
移动的相机 相机拍摄由时间t索引的图像(帧)序列 从一个时间到下一个时间,相机经历旋转(滚转、俯仰、偏航)和平移(tx、ty、tz) 运动(位移)场 运动场Motion Field和光流Optic Flow 运动场:三维相对速度矢量在二维图像平面上的投影 光流:在图像中观察到的亮度模式(brightness patterns)的二维位移 运动场是我们想知道的。 光流是我们可以

【计算机视觉】Lecture 20:八点法
提醒 本质/基础矩阵 本质矩阵和基础矩阵都是 3x3 的矩阵,用于“编码”两个视图的对极几何。 动机:给定一张图像中的一个点,乘以本质/基础矩阵将告诉我们在第二个视图中沿着哪个极线搜索。 本质/基础矩阵总结 Longuet-Higgins方程 极线: 极点: 本质矩阵 vs 基础矩阵: 本质矩阵E在成像坐标上作用(内参校准相机) 基础矩阵F在像素坐标上作用(未内参校准

【计算机视觉】Lecture 19:本质矩阵和基础矩阵
对极几何 左边 极点:相机1所看到的相机2的位置。 右边 极点:相机2所看到的相机1的位置 对极几何 对应点位于共轭极线上 对极几何 给定一幅图像中的一个点,我们如何确定在第二幅图像中要搜索的对应极线? 本质矩阵Essential Matrix 本质矩阵和基础矩阵都是 3x3 的矩阵,用于“编码”两个视图的对极几何。 动机:给定一张图像中的一个点,乘以本质/基础矩阵将告

【计算机视觉】Lecture 18:广义的立体视觉:对极几何
广义的立体视觉 主要思想:任何两张有重叠视图的图像,它们都可以被视为一对立体图像 我们只需要弄清楚这两个视图是如何关联的 视觉中一些最“漂亮”的数学问题是描述多个视图之间的几何关系。 回忆:对极约束(Epipolar Constraint) 重要的立体视觉概念: 给定左图像上的一个点,我们不必在整个右图像中搜索对应的点 “对极约束”将搜索空间缩小为一条一维的直线。 回顾:简单的立体

【计算机视觉】Lecture 17:拼接与稳定
回忆:平面投影 回忆:射影(逆)变换 回忆:平面投影 应用:稳定(Stabilization) 给定一系列视频帧,将它们变换到一个公共图像坐标系 这样“稳定”了视频,使其看起来好像相机不动一样。 稳定例子 链式稳定 如果参考图像没有与所有源图像重叠怎么办?只要有成对重叠,我们就可以连锁(合成)成对单应性变换。 不建议用于长序列,因为对齐误差会随着时间累积

【计算机视觉】Lecture 16:平面单应变换
动机:在平面上的点 回顾:正向投影 世界坐标系到相机坐标系的变换 透视矩阵方程(相机坐标系到成像坐标系) 成像坐标系到像素坐标系 从成像坐标(x,y)到像素坐标(u,v)的二维仿射变换Maff 平面上点的投影 单应性矩阵H(平面投影变换) 单应性矩阵H(平面投影变换) 对于平面,3D到2D的透视投影降为2D到2D的变换。,并且此变换是可逆的 特殊情况:

【计算机视觉】Lecture 15:鲁棒估计:RANSAC
回忆:参数估计 假设我们找到了两幅图像之间的匹配点,我们认为它们是通过一些参数化变换(例如平移;尺度欧几里德;仿射)相关联的。我们如何估计此变换的参数? 基本策略 基于对应点的最小二乘估计 但这个方法有一些问题… 问题:异常点(外点Outliers) 粗略地说,外点是不符合模型的点。 错误数据->外点 粗略地说,外点是不符合模型的点。 符合模型的点被称为内点 外点问题 最

【计算机视觉】Lecture 14:参数估计
总结:变换 参数估计 我们将会讨论以下方面的参数估计: 几何模型(如直线、平面、曲面)几何变换(我们讨论过的任何参数化变换) 最小二乘法是解决这两个问题的通用策略! 参数估计:拟合几何模型 总体思路: 希望使模型适合原始图像特征(数据):特征可以是点,边缘,甚至区域参数化模型:模型例子是Rn的一个元素,也就是模型实例 = (a1, a2,…,an)定义一个误差函数E(模型i,数据

【计算机视觉】Lecture 13/14:图像映射简介
图像映射概述 二维平面变换的基本操作 几何图像映射 x’ = f(x, y, {parameters}) y’ = g(x, y, {parameters}) 线性变换(可以写成矩阵) 平移(Translation) 尺度(Scale) 旋转(Rotation) 欧几里得(欧式,刚性变换) 分块矩阵 分块矩阵,由其他较小的矩阵块组成。这些小的矩阵块被称

【计算机视觉】Lecture 13:相机投影2
回忆:成像几何 世界坐标系 (U,V,W) 中感兴趣的对象 成像几何 相机坐标系 (X, Y, Z) Z是光轴 图像平面 (像素平面,成像平面) 位于沿光轴往外 f 个单位 f 称为焦距 成像几何 正向投影到图像平面 (像素平面,成像平面) 上。 三维(X,Y,Z)投影到二维(x,y) 成像几何 我们的图像被数字化成像素坐标(u,v) 成像几何 正向投
深度学习 Lecture 7 迁移学习、精确率、召回率和F1评分
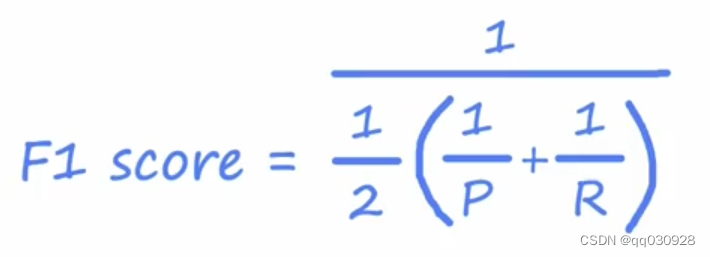
一、迁移学习(Transfer learning) 用来自不同任务的数据来帮助我解决当前任务。 场景:比如现在我想要识别从0到9度手写数字,但是我没有那么多手写数字的带标签数据。我可以找到一个很大的数据集,比如有一百万张图片的猫、狗、汽车和人等1000个类,那我就可以在这个大型数据集上用这一百万张图片作为输入,训练一个模型来学会识别这1000个不同的类别。 比如我训练出来后,长这样: 这里有
深度学习 Lecture 8 决策树
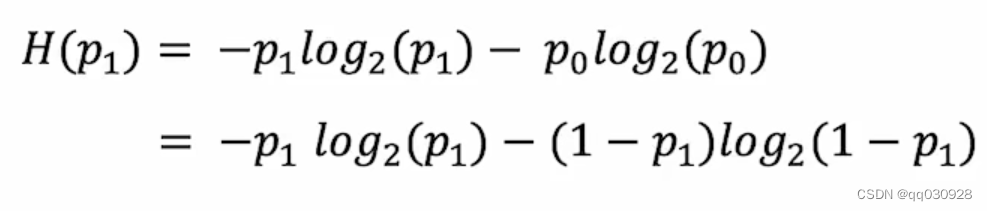
一、决策树模型(Decision Tree Model) 椭圆形代表决策节点(decison nodes),矩形节点代表叶节点(leaf nodes),方向上的值代表属性的值, 构建决策树的学习过程: 第一步:决定在根节点上的特征(也就是第一个分开样本的特征) 第二步:决定在内部节点上的特征(第二个、第三个分开样本的特征) 第三步:顺着特征写出特定的值的输出值 第一个问题:如何选择在每
Stanford CS230学习笔记(二):Lecture 2 Basics, Logistic Regression and Vectorization
事先声明:本文是写给自己看的,发在这里是因为掘金图床真的好方便orz(是的之前在掘金上,但是后来掘金的文中代码块标红,好难看!),本系列将按照我自己的逻辑整理,知识点并没有全写上,还可能会出现随心所欲中英文混杂的情况,公式也打算截图,如果你碰巧看到我的想要照着看也不是不行,但网上总结得比我好的太多了,甚至可以去找找看Stanford自己整理的笔记,内容很全,不过是全英文的,而且排版有点反人类 深


cf Educational Codeforces Round 41 B. Lecture Sleep
原题: B. Lecture Sleep time limit per test1 second memory limit per test256 megabytes inputstandard input outputstandard output Your friend Mishka and you attend a calculus lecture. Lecture lasts
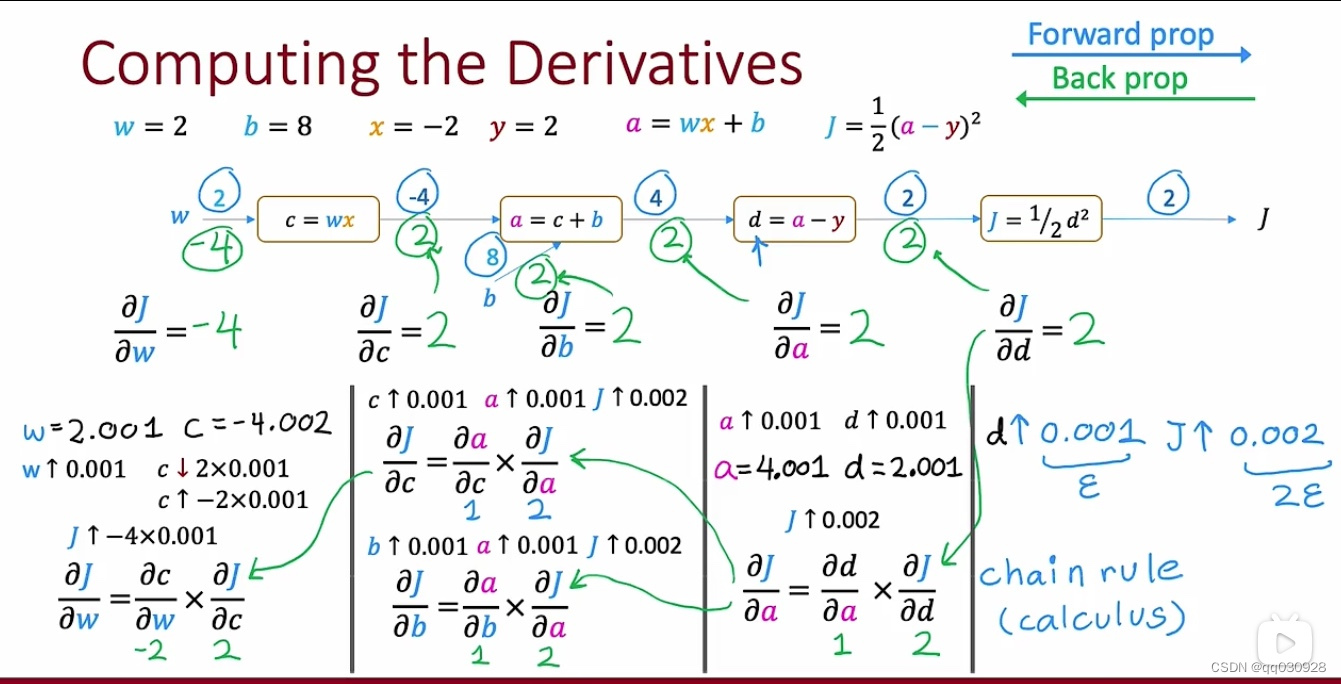
深度学习 Lecture 4 Adam算法、全连接层与卷积层的区别、图计算和反向传播
一、Adam算法(自适应矩估计) 全名:Adapative Moment Estimation 目的:最小化代价函数(和梯度下降一样) 本质:根据更新学习率后的情况自动更新学习率的值(可能是自动增大,也可能是自动变小) 它在全局不止有一个学习率,就是说每个式子的学习率都有可能有所不同。 优点:对学习率的选择更具有鲁棒性,通常比梯度下降还要快 注意:在代码中设置它的时候需要标注一个初始的
Lecture 011-3-Dantzig-Wolfe decomposition
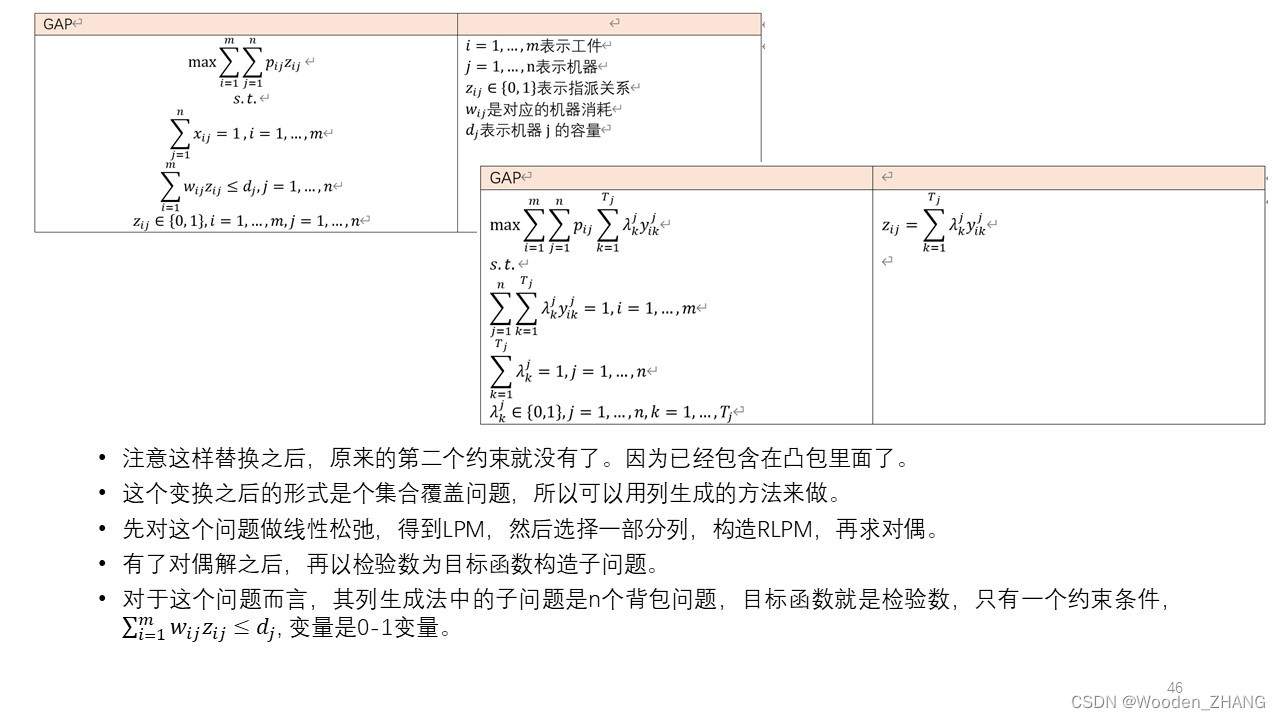
Outline •Fundamental understanding •Lagrangian relaxation & Representation theory •DW & CG •Case application ----------------------------- •列生成算法适用于解决一类候选决策方案可以由多个完全信息下的列表示的组合优化问题。•该算法并不直接对带有所有
EE5437-IOT(Lecture 07-Control Interface System)
Review: introduce the micro input device system(MIDS) • The calibration and testing has been covered • The introduction to filters with the example called Butterworth filter and the maths have be
20171027 - 18.01sc - Lecture 2-4
18.01sc - Single Variable Calculus 进度:Lecture 2、3、4 一、课堂内容(从简,时间:2小时,含课后练习) 什么是导数(物理解释) 变化率(rate of change) 电量(charge)和电流(current)距离(distance)和速度(speed) 极限和连续性(limits and continuity) 微分和连续性微分公式
【计算机视觉】Lecture 20:八点法
提醒 本质/基础矩阵 本质矩阵和基础矩阵都是 3x3 的矩阵,用于“编码”两个视图的对极几何。 动机:给定一张图像中的一个点,乘以本质/基础矩阵将告诉我们在第二个视图中沿着哪个极线搜索。 本质/基础矩阵总结 Longuet-Higgins方程 极线: 极点: 本质矩阵 vs 基础矩阵: 本质矩阵E在成像坐标上作用(内参校准相机) 基础矩阵F在像素坐标上作用(未内参校准

A and B and Lecture Rooms CodeForces - 519E(LCA倍增,思维)
题目大意 给定一棵树,然后q个询问,距离两个点距离相等点的个数。 思路 先用LCA求出两个点的最近公共祖先,然后判断距离,如果说两个点距离lca的距离和为奇数那么不存在距离相等的点,如果说距离为偶数,那么又可以分出两种情况,第一种情况是距离相等那么就是所有的点数量去掉包lca包含a,b子树的节点数。距离不相等,那么就是中点位置的子树节点数减去其包含深度大的那个结点子树。 代码 #incl
CS230 Lecture 2深度学习的直观认识(Deep Learning Intuition)
观看斯坦福大学公开课CS230后记录笔记,以便以后查阅之用。 使用逻辑回归解决特定目标是否在图片中问题时,对于判断目标是否存在于图片中,对输出的编码可以采用sigmoid函数编码,设置一个阈值,当模型输出大于阈值时,判断存在,反之不存在图中。 解决一个动物分类问题时,当图片中只有一个动物时,可以使用One-Hot编码,当图片中存在多个动物时,也可以采One-Hot编码,例如[1,1,0]
【GAMES101】Lecture 22 物理模拟与仿真
目录 单粒子模拟 显式欧拉方法 改进 中点法/修正的欧拉方法 自适应步长 隐式欧拉方法 非物理改变位置(Position-Based / Verlet Integration) 刚体模拟 流体模拟 单粒子模拟 先来研究粒子的运动,假设有一个速度矢量场,对于确定的位置和时间可以确定粒子的速度 就会有一个计算粒子随时间的位置的一阶常微分方程Ordinary Diff