本文主要是介绍【计算机视觉】Lecture 14:参数估计,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
总结:变换

参数估计
我们将会讨论以下方面的参数估计:
- 几何模型(如直线、平面、曲面)
- 几何变换(我们讨论过的任何参数化变换)
最小二乘法是解决这两个问题的通用策略!
参数估计:拟合几何模型
总体思路:
- 希望使模型适合原始图像特征(数据):特征可以是点,边缘,甚至区域
- 参数化模型:模型例子是Rn的一个元素,也就是模型实例 = (a1, a2,…,an)
- 定义一个误差函数E(模型i,数据),该函数测量给定模型实例对数据的描述程度(好坏)
- 求解最小化E的模型实例
示例:直线拟合
总体思路:
1. 希望使模型适合原始图像特征(数据):特征可以是点,边缘,甚至区域
2. 参数化模型:模型例子是Rn的一个元素,也就是模型实例 = (a1, a2,…,an)
3. 定义一个误差函数E(模型i,数据),该函数测量给定模型实例对数据的描述程度(好坏)
4. 求解最小化E的模型实例
点特征数据(第一步)
点特征 = {(xi, yi) | i = 1,…,n}

示例:直线拟合
总体思路:
- 希望使模型适合原始图像特征(数据):特征可以使点,边缘,甚至区域
2. 参数化模型:模型例子是Rn的一个元素,也就是模型实例 = (a1, a2,…,an) - 定义一个误差函数E(模型i,数据),该函数测量给定模型实例对数据的描述程度(好坏)
- 求解最小化E的模型实例
直线参数化(第二步)
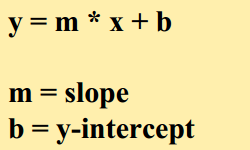
b横穿y轴
模型实例 = (m, b)

示例:直线拟合
总体思路:
- 希望使模型适合原始图像特征(数据):特征可以使点,边缘,甚至区域
- 参数化模型:模型例子是Rn的一个元素,也就是模型实例 = (a1, a2,…,an)
2. 定义一个误差函数E(模型i,数据),该函数测量给定模型实例对数据的描述程度(好坏) - 求解最小化E的模型实例
最小二乘法(第三步)
最小二乘只是众多误差函数中的一种
- 给定直线(m, b)
- 点(xi,yi)到直线的距离是垂直距离
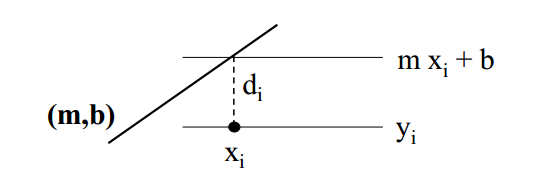
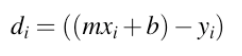
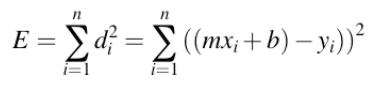
- E是所有点的平方距离之和
示例:直线拟合
总体思路:
- 希望使模型适合原始图像特征(数据):特征可以使点,边缘,甚至区域
- 参数化模型:模型例子是Rn的一个元素,也就是模型实例 = (a1, a2,…,an)
- 定义一个误差函数E(模型i,数据),该函数测量给定模型实例对数据的描述程度(好坏)
3. 求解最小化E的模型实例
求极值的微积分(第四步)
- 分别求 E 关于 m 和 b 的一阶导数
- 将方程设为零
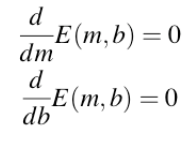
- 求解 m 和 b (线性回归的等价性)
最小二乘解

参数化问题
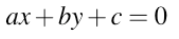
我们的参数化有一个问题,即(m,b)对于垂直线是未定义的
更一般的直线参数化是下面这样的
代数距离的最小二乘法
代数距离 :

误差函数求导
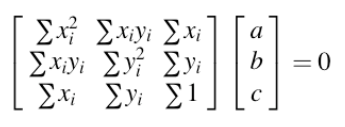
(a,b,c)是与最小特征值相关联的特征向量
(只有在没有噪声的情况下才是0,因此所有的点都准确地在一条直线上)

请注意,与线性回归直线(在这种情况下)有很大不同,但我们可以放心,当我们的程序看到一条垂直线时,它不会凸起!
代数最小二乘问题
注意:我没有在图上画出误差向量
那是因为我不知道怎么画…
代数距离的主要问题:很难说清楚你在最小化什么,因为代数距离是有很少物理意义的量
正交最小二乘法
最小化正交(几何)距离。
在物理上有意义,但很难推导
表示:
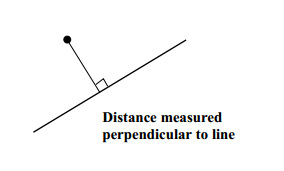
垂直于直线测量的距离
正交最小二乘法
很难推导。
关键洞察:最佳的拟合直线必须会通过点集的质心!
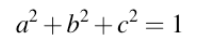
将质心移到原点。
这就将问题简化为寻找垂直于直线的单位向量:寻找(a,b)使得 a平方 + b平方 =1
这将是点的散射矩阵的最小特征向量。
最后,解出c
正交最小二乘解

这个“距离”是指我们直觉上所期望的
(即到线上最近点的距离,或到线上的最小距离)
参数估计:估计变换
假设我们找到了两幅图像之间的匹配点,我们认为它们是通过一些参数化变换(例如平移;尺度欧几里德;仿射)相关联的。我们如何估计此变换的参数?
基本策略
基于对应点的最小二乘估计
两个重要(相关)问题:
多少自由度?
需要多少个对应点?
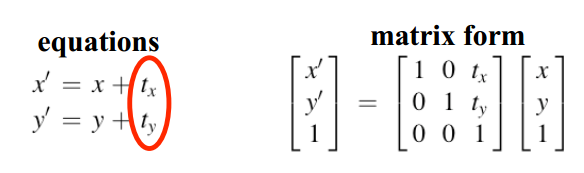
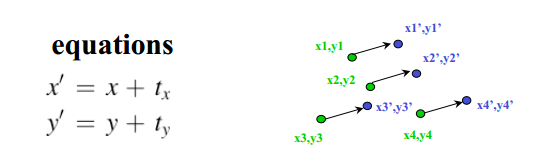
例子:平移估计
多少自由度?
有多少自变量?
两个
需要多少个对应点?
每个对应关系提供两个方程 (x, y)=>(x’, y’)
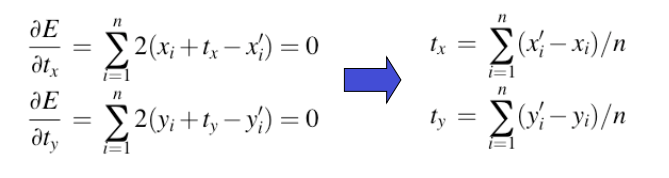
例子:平移估计
最小二乘估计:
最小化

尝试另一个例子
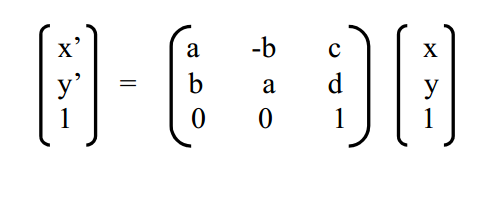
相似变换
实际问题
一旦我们估计了一个变换,我们如何(反)映射图像像素值来产生一个新的图像
映射&双线性插值
给定两个图像(坐标系)之间的变换,我们希望将一个图像“映射(warp)”到另一个图像的坐标系中。
我们将我们要映射的坐标系称为“源source”图像
我们将要映射到的坐标系称为“目标destination”图像。
映射例子
在这个例子中的变换是射影变换(一般的 3x3 矩阵,在齐次坐标系上运算)

正向映射

在源图像上的每个像素x
以H(x)的形式确定此像素的去向
为目标像素上色
正向映射问题

会留下空隙,这是一个比较大的问题(因为映射有放大作用)
逆向映射(没有空隙)

在目标图像上的每个像素x
以H-1(x)的形式确定此像素的来源
从那个地方获得颜色
插值
我们所说的“从那个地方获得颜色”是什么意思?
考虑灰度值。在(x, y)处的灰度值是什么?

最近的邻域:
取离中心最近的那个像素的颜色。
双线性插值
我们所说的“从那个地方获得颜色”是什么意思?
考虑灰度值。在(x, y)处的灰度值是什么?

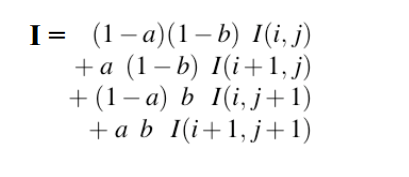
双线性插值:加权平均
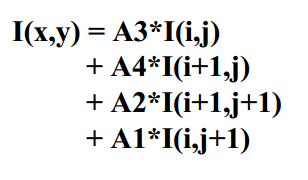
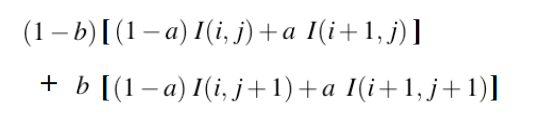
双线性插值,数学描述
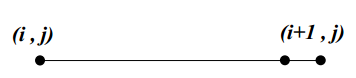
首先,考虑线性插值

初始化:给定两个像素值,它们之间的某个中间点的值应该是多少?
如果接近(i,j),则灰度值应该类似于 I(i,j)

如果与两者距离相等,则应该为两个灰度值的平均值
如果接近 (i+1, j),则灰度值应该类似于 I(i+1, j)
线性插值
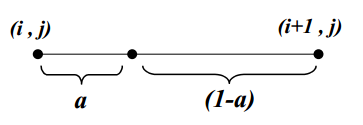

回忆:平面上直线求解
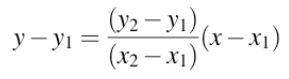
实例化:
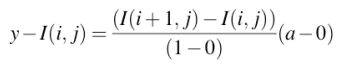
求解:

双线性插值,数学描述


Matlab中的图像映射
interp2是 Matlab 内置的图像映射函数
用法: interp2(X,Y,Z,XI,YI)

使用Interp2的技巧
为了达到我们的目的,我们可以假设 X 和 Y 是正交的图像像素坐标
简单用法: interp2(Z,XI,YI)

它是如何工作的?
考虑计算R行和C列的ZI值。

XI 和 YI 是和 ZI 尺寸相同的两个数列
对给定行列(R, C),数值 (XI(R, C), YI(R, C)) 表示为获取的原始图像上 (X,Y) 坐标处的值
最终结果是: Z(YI(R, C), XI(R, C))


interp2 处理了双线性插值,以防 YI(R, C) 和 XI(R, C) 不是整数坐标。
interp2有可选参数来更改计算插值的方式。我们可以使用默认值,即双线性插值。
Meshgrid
使用interp2时的一个有用函数是meshgrid

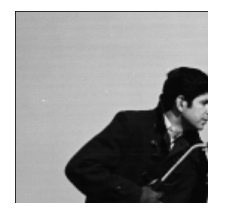
Interp2例子



Interp2例子
易混淆点

将坐标值除以2是将图像放大尺度2

将坐标值乘以2是将图像缩小尺度2
Interp2希望反坐标变换为所需的几何变换(它使用逆向映射)
Interp2例子
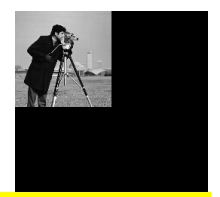
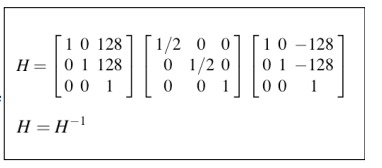
一个更复杂的例子:缩小尺度2,但围绕图像中心(128, 128),而不是(0, 0)
回忆变换矩阵级联

这指定了我们希望原始图像如何映射到新图像中。

Interp2想知道新的图像坐标如何映射回原始图像坐标。
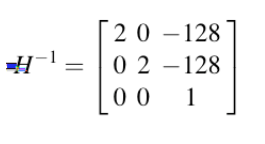

更一般的(比如齐次坐标系中任何 3×3 变换矩阵)

这篇关于【计算机视觉】Lecture 14:参数估计的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


![业务中14个需要进行A/B测试的时刻[信息图]](https://img-blog.csdnimg.cn/img_convert/aeacc959fb75322bef30fd1a9e2e80b0.jpeg)






