本文主要是介绍【计算机视觉】Lecture 16:平面单应变换,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
动机:在平面上的点

回顾:正向投影

世界坐标系到相机坐标系的变换

透视矩阵方程(相机坐标系到成像坐标系)

成像坐标系到像素坐标系
从成像坐标(x,y)到像素坐标(u,v)的二维仿射变换Maff

平面上点的投影



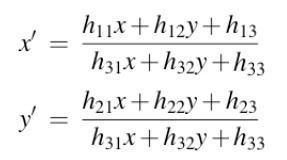
单应性矩阵H(平面投影变换)
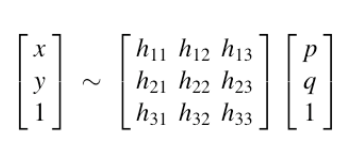
单应性矩阵H(平面投影变换)
对于平面,3D到2D的透视投影降为2D到2D的变换。,并且此变换是可逆的
特殊情况:正平面
如果平面垂直于光轴(相机坐标系的Z轴),怎么办?
世界坐标系旋转矩阵简化为:

所以正平面的单应性简化为:
 是一个相似变换
是一个相似变换
转换到像素坐标系

平面投影图






总结:平面投影

应用单应性变换去除透视畸变
 针对平面建筑面,4组匹配点对足以
针对平面建筑面,4组匹配点对足以
鸟瞰图的单应性变换

图像拼接的单应性变换

两个实际问题
-
给定四个或更多匹配点对,如何估计对应的单应性矩阵(将会用最小二乘法推导)
-
如何(反向)映射图像像素值以生成新图片(上一节课讲的)
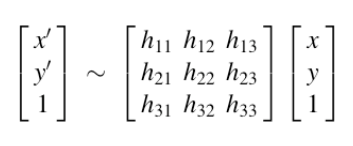
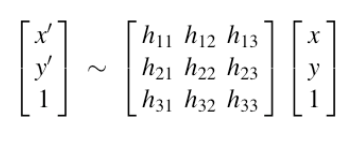
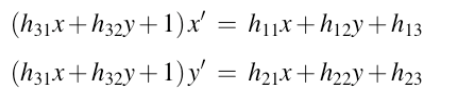
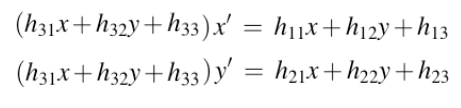
估计单应性矩阵
矩阵形式:
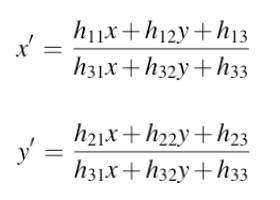
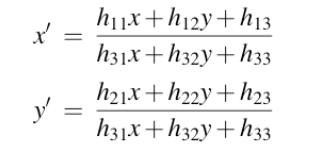
方程形式:
自由度?
这里有有个变量 h11,…,h33,所以自由度是9?
并不是。
注意,我们可以将所有 hij 乘以非零常数 k,而不必改变方程组
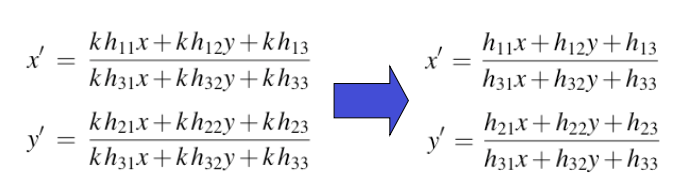
采用8自由度
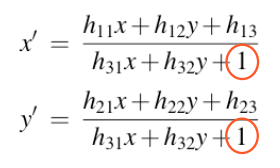
一种方法:设 h33 = 1
第二方法:增加单位向量约束
单位向量约束:

代数距离的最小二乘
设 h33 = 1 :
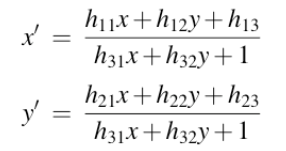
乘以分母:
整理:
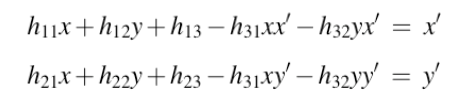

线性方程:
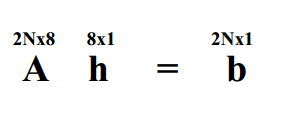
解:

Matlab:
注意:数值调节
R.Hartley: “In Defense of the Eight Point Algorithm”
八点法Eight Point Algorithm
观察:根据点对应关系对射影变换参数进行线性估计时,常常会遇到矩阵条件差(poor “conditioning” )的问题。这意味着这样的解法对对应点的噪声敏感(即使没有外点)。
为了得到更好的答案,通过对每个点集进行规范化来对矩阵进行预处理,方法是:
- 将点集质心平移为原点
- 缩放,使点集与原点的平均距离为sqrt(2)。
- 对每个点集独立进行标准化
Hartley的预处理

更一般的方法
设 h33 = 1 可能会产生什么问题?
如果 h33 实际上等于0,我们就不能得到正确的答案。
代数距离,||h||=1
||h||=1:
乘以分母:
整理:
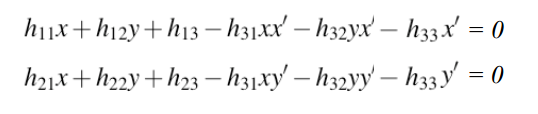

齐次方程:
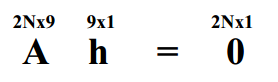
解:

设 h 为与矩阵 D 中最小特征值相关联的矩阵 U 的列(也就是单位特征向量)
(注:如果只有4个点,则该特征值为0)
这篇关于【计算机视觉】Lecture 16:平面单应变换的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









