变换专题

C++变换迭代器使用方法小结
《C++变换迭代器使用方法小结》本文主要介绍了C++变换迭代器使用方法小结,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一起学习学习吧... 目录1、源码2、代码解析代码解析:transform_iterator1. transform_iterat
Verybot之OpenCV应用二:霍夫变换查找圆
其实我是想通过这个程序来测试一下,OpenCV在Verybot上跑得怎么样,霍夫变换的原理就不多说了,下面是程序: #include "cv.h"#include "highgui.h"#include "stdio.h"int main(int argc, char** argv){cvNamedWindow("vedio",0);CvCapture* capture;i

【数字信号处理】一文讲清FFT(快速傅里叶变换)
目录 快速傅里叶变换(Fast Fourier Transform,FFT)FFT的背景快速傅里叶变换(Fast Fourier Transform,FFT)DFT的数学表达实际计算重要性和应用频谱泄露、频谱混叠奈奎斯特采样定理参考链接 快速傅里叶变换(Fast Fourier Transform,FFT) FFT的背景 1、为什么要时域→频域频率?50Hz+频率120Hz


齐次变换矩阵的原理与应用
齐次变换矩阵的原理与应用 通过齐次变换矩阵,可以描述机械臂末端执行器(法兰)在三维空间中的平移和旋转操作。该矩阵结合了旋转和平移信息,用于坐标变换。 1. 齐次变换矩阵的基本形式 一个齐次变换矩阵 T是一个 4x4 矩阵,表示刚体的旋转和平移: T = [ R t 0 1 ] = [ r 11 r 12 r 13 x r 21 r 22 r 23 y r 31 r 32 r 33 z 0
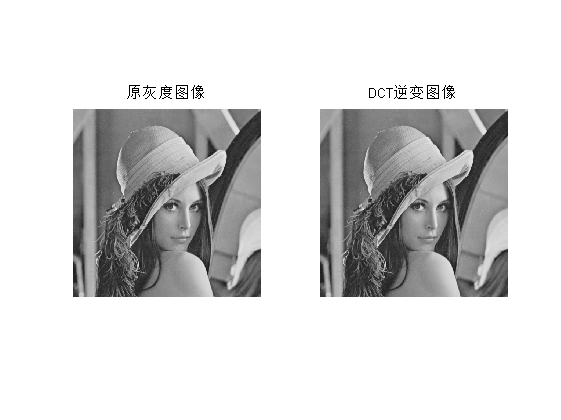
MATLAB分析图像的离散余弦变换(DCT)
1. MATLAB的介绍以及所需函数的说明: 1.1 MATLAB MATLAB是matrix&laboratory两个词的组合,意为矩阵工厂(矩阵实验室)。是由美国mathworks 公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设

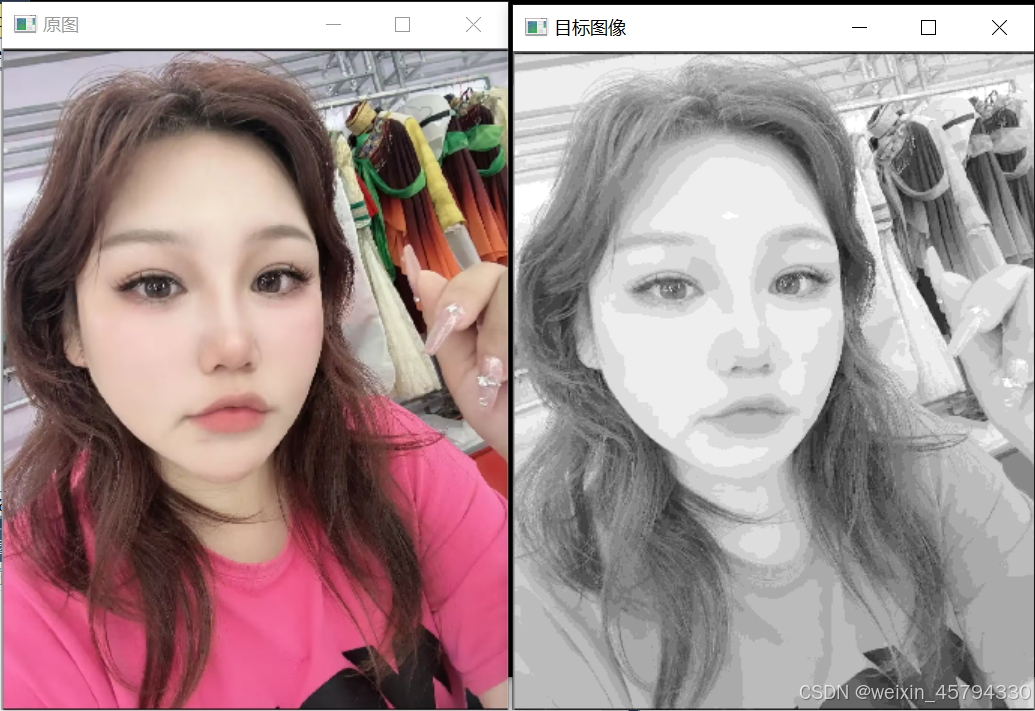
PyTorch Demo-4 : 数据变换Transforms
Transforms的函数有很多,每次都是直接copy已有的代码,但是不知道具体是什么样子,在这里记录一下 Transforms常用方法的具体说明参考链接1,链接2,或者官方文档。 原始图像采用图像处理经典的Lena: Python代码 from PIL import Imagefrom torchvision import transforms as tfimport ma
【Get深一度】小波变换通俗解释 -算法与数学之美
链接:http://www.zhihu.com/question/22864189/answer/40772083 文章推荐人:杨晓东 从傅里叶变换到小波变换,并不是一个完全抽象的东西,可以讲得很形象。小波变换有着明确的物理意义,如果我们从它的提出时所面对的问题看起,可以整理出非常清晰的思路。 下面就按照傅里叶-->短时傅里叶变换-->小波变换的顺序,讲一下为什么会出现小波这个东

【Get深一度】信号处理(二)——傅里叶变换与傅里叶级数的区别与联系
1.傅里叶级数和傅里叶变换: 傅里叶级数对周期性现象做数学上的分析 傅里叶变换可以看作傅里叶级数的极限形式,也可以看作是对周期现象进行数学上的分析。 除此之外,傅里叶变换还是处理信号领域的一种很重要的算法。要想理解傅里叶变换算法的内涵,首先要了解傅里叶原理的内涵。 傅里叶原理表明:对于任何连续测量的数字信号,都可以用不同频率的正弦波信号的无限叠加来表示。 傅里叶变
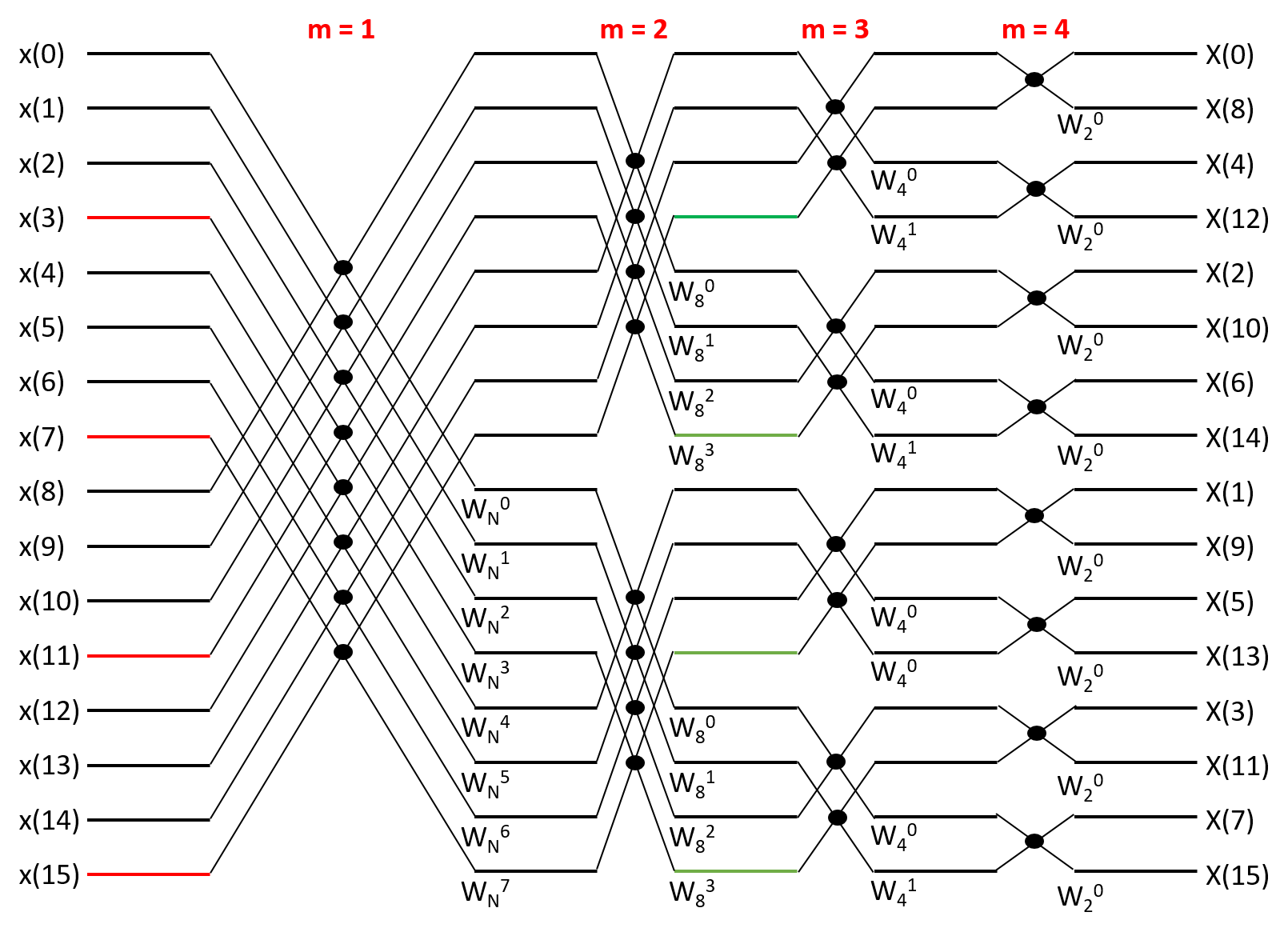
【C】快速傅里叶变换(FFT)讲解及实现
引言基2FFT 1.引言 人类的求知欲是永无止境的,自1965年 T. W. Cooley 和 J. W. Tuky 在《Math. Computation, Vol, 19, 1965》发表了著名的《 An algorithm for the machine calculation of complex Fourier series 》,人们对 有关傅里叶变换的改进和创新就从未止步。1
CV---点围绕旋转中心变换
对图片上任意点(x,y),绕一个坐标点(rx,ry)旋转a角度后的新的坐标设为(x0, y0), 则有公式: x0= (x - rx)*cos(a) - (y - ry)*sin(a) + rx ;y0= (x - rx)*sin(a) + (y - ry)*cos(a) + ry ; 推导公式参考: http://jingyan.baidu.com/article/2c8c281dfbf
【机器人工具箱Robotics Toolbox开发笔记(四)】 机器人位姿变换之位姿变换函数
机器人学的位姿变换相关内容,可以采用下列函数来进行计算。 (1)rpy2r() R = rpy2r (roll, pitch, yaw, options)能够根据一组回转角、俯仰角和偏转角求出对应齐次变换矩阵中的旋转矩阵R(3x3),其中3个角度rpy = [R, P, Y]分别对应于关于x、y、z轴的顺序旋转。 R = rpy2r (rpy, options)与前者相同,但是输入的是一个向量

openlayer实现仿各大地图的标注点触碰样式变换
关键 经过反复的实验,成功的关键是利用select控件来改变样式,同时要注意避免因select的注册而锁住地图。 代码 记住要用styleFunction来写入样式,同时注意不能单独设置要素的样式,一旦设置无法再转换。 var select = new ol.interaction.Select({condition: function(evt) {return evt.orig
![[3.2] 机器人连杆变换和运动学方程](https://i-blog.csdnimg.cn/direct/81217c6b578c44bdae31d252d0541f96.png)
[3.2] 机器人连杆变换和运动学方程
本节首先推导相邻两连杆坐标系之间的变换矩阵,然后将这些变换矩阵依次相乘,得到操作臂的运动学方程。该方程表示末端连杆相对于基座的位姿关系,是各关节变量的函数。 连杆坐标系{i}与{i-1}通过四个参数、、、联系起来,因此坐标系{i}相对于{i-1} 的齐次变换矩阵T,通常也是连
![B3918 [语言月赛 202401] 图像变换](/front/images/it_default.jpg)
B3918 [语言月赛 202401] 图像变换
[题目通道]([语言月赛 202401] 图像变换 - 洛谷) #include<bits/stdc++.h>using namespace std;int n,m,k;string a[1000],st;int main(){cin>>n>>m>>k;for (int i=1;i<=n;i++){cin>>a[i];}for (int i=1;i<=n;i++){st="";for (

OpenCV学习笔记(24)关于hough变换中pt1、pt2点的确定
经过Hough线变换,可以得到一些线段集合,对于这些线段,每一条线段给的是两个值,在极坐标下面的极径和极角,那么如何画出这样的每条直线呢,可以用到line函数,但是line 函数中有两个参数需要确定,pt1和pt2。 如图所示: 因此有如下画图代码 for (i = 0; i < lines.size(); i++){fRho = lines[i][0];fThe

leetcode 6:Z字形变换
观察本题可以找到规律,每次对s的2*numRows-2个字母进行操作,比如3行时,每四个字母为一个循环,4行时每6个字母为一个循环。对于每次循环的前numRows个字母,用该字母的下标i%2*numRows 结果为当前字母所在的行。而对于每次循环的后numRows-2个字母,numRows-i%2*numRows为当前字母所在的行。 以numRows举例,每6个字母为一个循环,就拿前6个字母

NumPy(一):简介【主要功能:操作数组、矩阵】【Python + NumPy == Matlab】【包括很多实用的数学函数】【覆盖了很多的数学领域, 比如:线性代数、傅里叶变换、随机数生成】
一、NumPy是什么? NumPy是一个开源的Python科学计算库。 Numerical Python 二、NumPy有什么功能 NumPy主要的功能之一用来操作数组和矩阵。 NumPy是科学计算、深度学习等高端领域的必备工具。 使用TensorFlow、Caffe。框架训练神将网络模型时,需要进行大量复杂的计算,可以直接调用NumPy里面的API NumPy包含了很多实用的数学函数

canvas(2)绘制路径,文本,坐标变换
canvas 绘制路径,文本,坐标变换 var drawing = document.getElementById('drawing');if(drawing.getContext){//获取绘图的上下文var context = drawing.getContext('2d');//开始路径context.beginPath();//绘制外圆context.arc(100,100,9

短时傅里叶变换(Short-Time Fourier Transform, STFT),语音识别
高能预警!!! .wav文件为笔者亲自一展歌喉录制的噪声,在家中播放,可驱赶耗子,蟑螂 介绍 短时傅里叶变换(Short-Time Fourier Transform, STFT)是一种时频分析方法,用于分析非平稳信号的频率成分随时间的变化。与传统的傅里叶变换不同,STFT在处理信号时考虑了时间局部性,使得它能够同时在时间域和频率域上分析信号。 STFT的背景 傅里叶变换可以将信号从时间
A\B求解将 B转换到 A 的坐标系中的变换
%% 将罐子附加到末端执行器removeBody(robot,'leftWidgetFrame');removeBody(robot,'rightWidgetFrame');% 获取机器人手部的当前姿态graspConfig = qInterpFROMinitialGOTOgrasp(end,:);leftGripperFramePose = getTransform(robot,gra

从零开始学cv-13:形态学变换进阶操作
文章目录 前言一、孔洞填充二、形态学凸壳与细化 前言 通过上文的学习,我们已经基本掌握了基本的形态学操作,并且可以根据这些操作解决大部分实际问题,但还有一些单纯依靠上述算法难以解决的问题,下面我们来举几个更复杂的形态学操作. 提示:以下是本篇文章正文内容,下面案例可供参考 一、孔洞填充 孔洞在图像处理中是指被前景像素完全包围的背景区域,表现为图像中的空白连通区域,不
MATLAB中的快速傅里叶变换FFT与IFFT
背景 FFT (Fast Fourier Transform)是离散傅立叶变换的快速算法,可以将一个信号从时域变换到频域。同时与之对应的是IFFT(Inverse Fast Fourier Transform)离散傅立叶反变换的快速算法。为掌握FFT和IFFT在MATLAB中的应用,我们需要了解FFT的基本原理。 MATLAB应用及原理 X = fft(x,N);x = ifft(X, N