本文主要是介绍Lecture 9,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
绪论
这一章节介绍的是divide-and-conquer multiplication,divide的意思是分开,conquer的意思是占据,控制,divide-and-conquer直译下来就是分开后控制,其实就是分而治之的意思,multiplication的意思是乘法。divide-and-conquer multiplication算法的主要核心思想就是分治,通过分治来简化各种较为复杂的乘法运算。
后面还介绍了有关FFT的知识点,因为我也是问了别人才弄懂的,不做过多赘述。
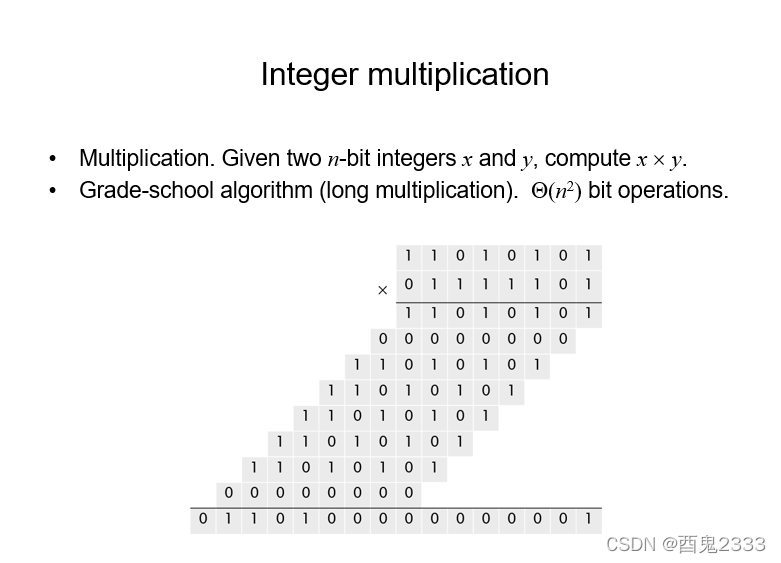
Integer Multiplication
首先讨论实数与实数(整型与整型,浮点型与浮点型)之间的运算:
之前提到过基础的运算加减乘除,左移右移等的复杂度都视作O(1),这个O(1)不是说只做一次操作,而是相对于字节长度固定的整型(浮点型)而言,因为字节长度也就是位数固定,和位数相关的运算的复杂度也看做常数级。
例如加减运算和左移右移运算,如果限定的位数为n,需要依次对每一位进行运算和记录进位,所以复杂度为O(n)
int整型的位数为32,也就是说一次加法运算做的操作次数约为32个常数单位。

如果是两个二进制数的乘法,需要其中的一个二进制数对另一个二进制数的每一位逐步进行运算,然后将运算的结果进行错位的相加。每一位(乘法)运算的复杂度为O(n),n位的运算的复杂度就为O(n2),错位相加总共需要相加的位数为n*n=n2,根据前面的结论也可以得到复杂度为O(n2),总结n位二进制数相乘的复杂度为O(n2)。
int整型的位数为32,也就是说一次乘法运算做的操作次数约为32*32=1024个常数单位。同样都为基础运算,相较于加减法和左右移位,乘法的复杂度就要高很多。这就是为什么在前面提到的哈希技术中,需要尽可能地将乘法和模运算用左移右移运算来代替。
上面是一般的二进制乘法,分治思想是考虑将大的问题分割成若干个子问题解决,用分治法来优化二进制乘法就是将n位的二进制数相乘看作一个规模为n的问题,将一个二进制数分割成前半的部分和后半的部分,前半和后半的部分分别进行计算,规模为n的问题不断地切割成若干个规模为n/2的问题。

伪代码和对应部分的时间复杂度如下:
这篇关于Lecture 9的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!