本文主要是介绍EE5437-IOT(Lecture 07-Control Interface System),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Review:
introduce the micro input device system(MIDS)
• The calibration and testing has been covered
• The introduction to filters with the example called Butterworth filter and the maths have been also demonstrated.
• self calibration algorithm has been covered
• Power(功率) Spectral Density is selected for the data analysis.
• The motion sensing system for sport and machine have been shown with the experimental results.
PID Control(比例积分微分控制)
PID控制被用来通过不断调整控制输出来调节系统,这是基于期望设定点和测量过程变量之间的差异。
PID控制的基本思想是使用三个控制项:比例、积分和微分,来提供一个控制输出,该输出与期望设定点和测量过程变量之间的误差成比例关系。
1:比例项提供与误差成比例的控制输出,对系统变化的响应速度很快,但可能会导致超调和振荡。
2:积分项提供与误差随时间的积分成比例的控制输出,提供随时间增加的纠正作用,有助于消除稳态误差。
3:微分项提供与误差变化率成比例的控制输出,提供减小超调和调整时间的阻尼效应。
PID控制器将这三个项结合起来产生一个控制输出,该输出用于调整系统的输入,例如电机的速度或阀门的位置,以维持期望的设定点。PID控制器被广泛应用于各种应用中,包括工业自动化、机器人技术和过程控制系统中的温度控制、速度控制和位置控制。
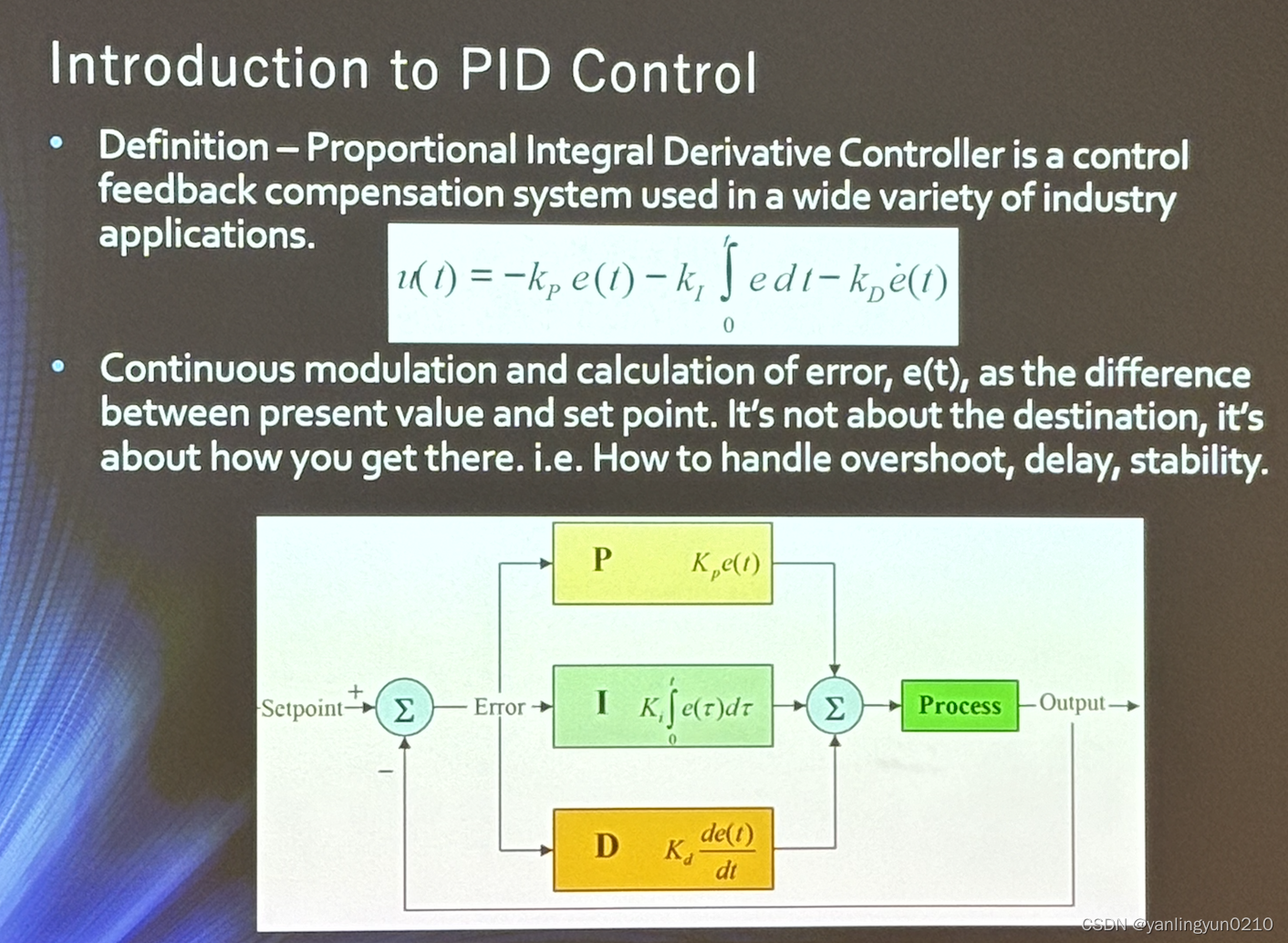
e(t) as the difference between present value and set point,it's not about the destination it's about how you get there.
For the PID,there are some understandings about it:
1:P=proportional gain(current)
2:I=Integral(积分) gain(past)
3:D=Derivate(派生) gain(future)
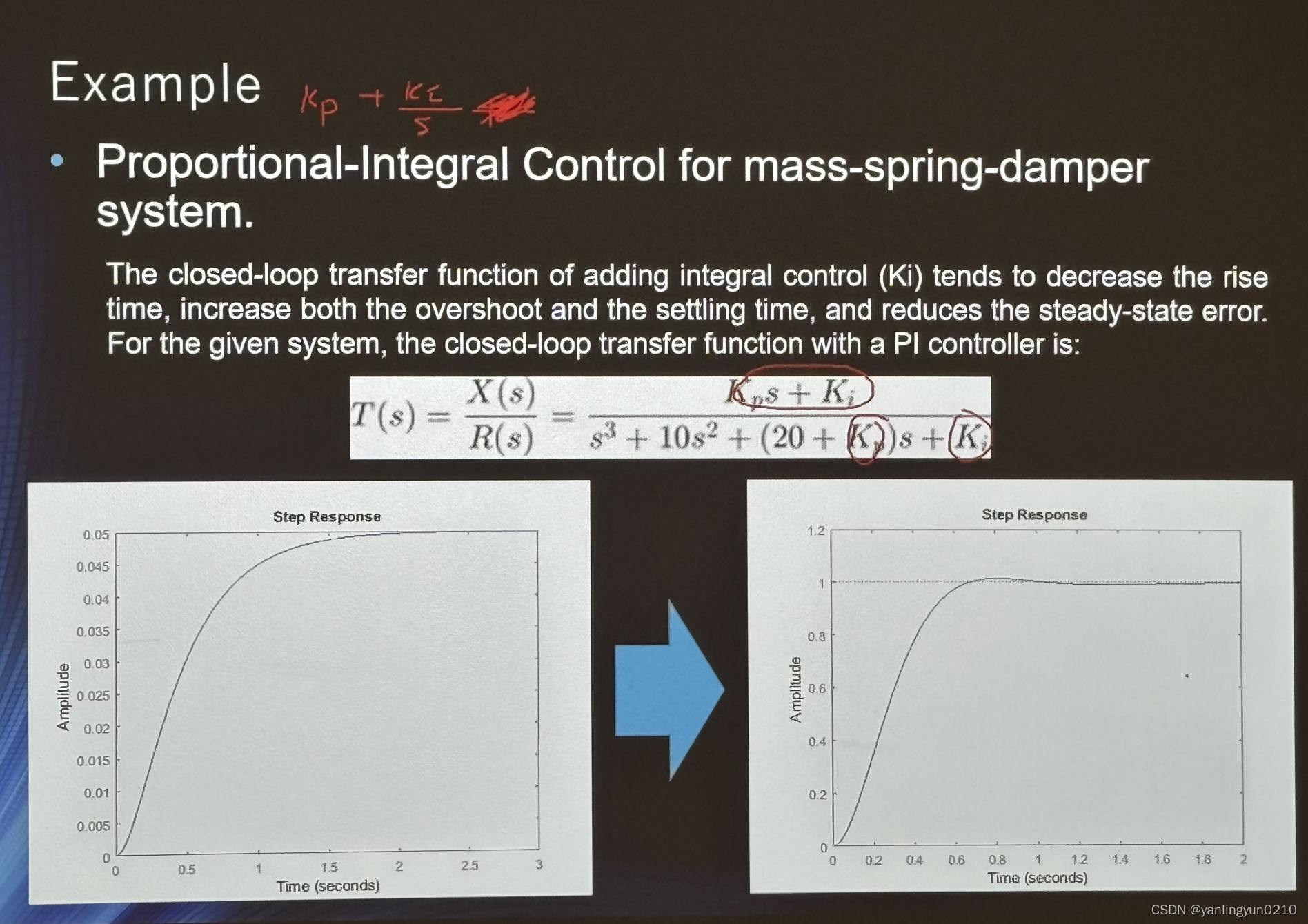
##PI Compensator##
improves steady state accuracy by increasing the system type number,which is adding a pole to the forward path of closed loop transfer function.
通过增加系统类型数来提高稳态精度(steady status accuracy),即在闭环传递函数的正向路径上增加一个极点
增加不稳定性或瞬态响应,通常具有更高的过冲。
比例加积分补偿器的传递函数:
[formula]
##PD Compensator##
System type number decreases by one because of the open-loop zero(开环零点) added, which in turn improves stability.
主要用于增加系统的响应时间(increased response time)。
但是,可能会对稳态误差产生影响。
增益 Kd 对系统的开环零点位置有重大影响。Kd 应大于 Kp 以使其开环位置的极点向左移动,因为:
[formula]
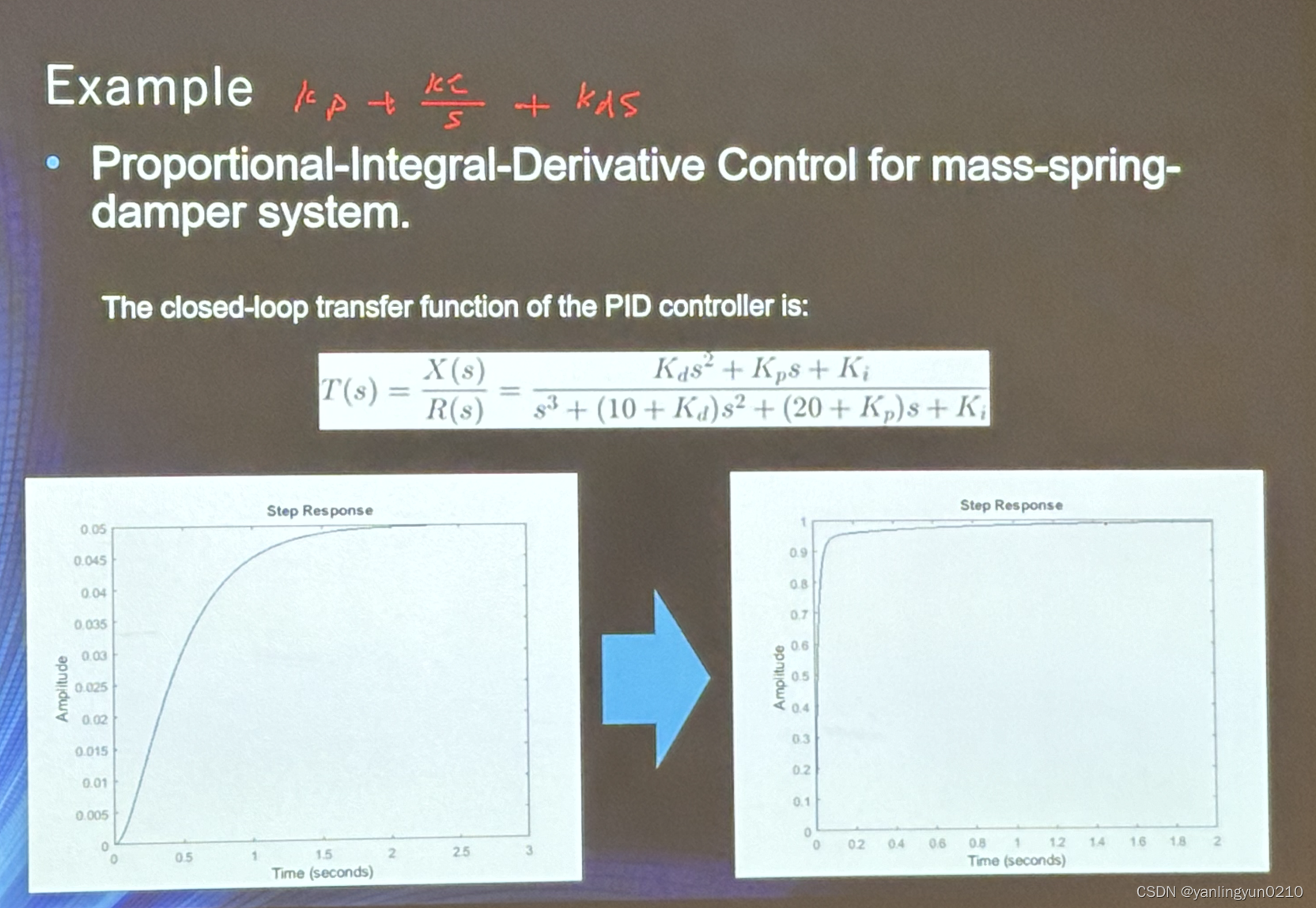
##PID Compensator##
PID Compensator combines the steady state accuracy of the PI with the improvement in stability and increased response time of a PD compensator
##Example-Ziegler-Nichols-Tuning Method##

• 齐格勒-尼科尔斯调谐方法(应用比例补偿器)
调整增益,直到达到振荡,略微稳定。(增益被指定为 Kpo 和振荡周期 To。)
整体补偿器定义为:formula
ZN 补偿确实会产生激进的过冲,这对于某些应用来说并不理想。
##Example-PID control##
Simple Tuning Method
Turn all gains to 0
Begin turning up proportional gain until the system begins to oscillate
Reduce the proportional gain until the oscillations stop, and then back down by about 20%
Slowly increase the derivative term(导数项) to improve response time and system stability
Increase the integral term(积分项) until the system reaches the point of instability and then back it off slightly
##A specific example and its PI PD PID##
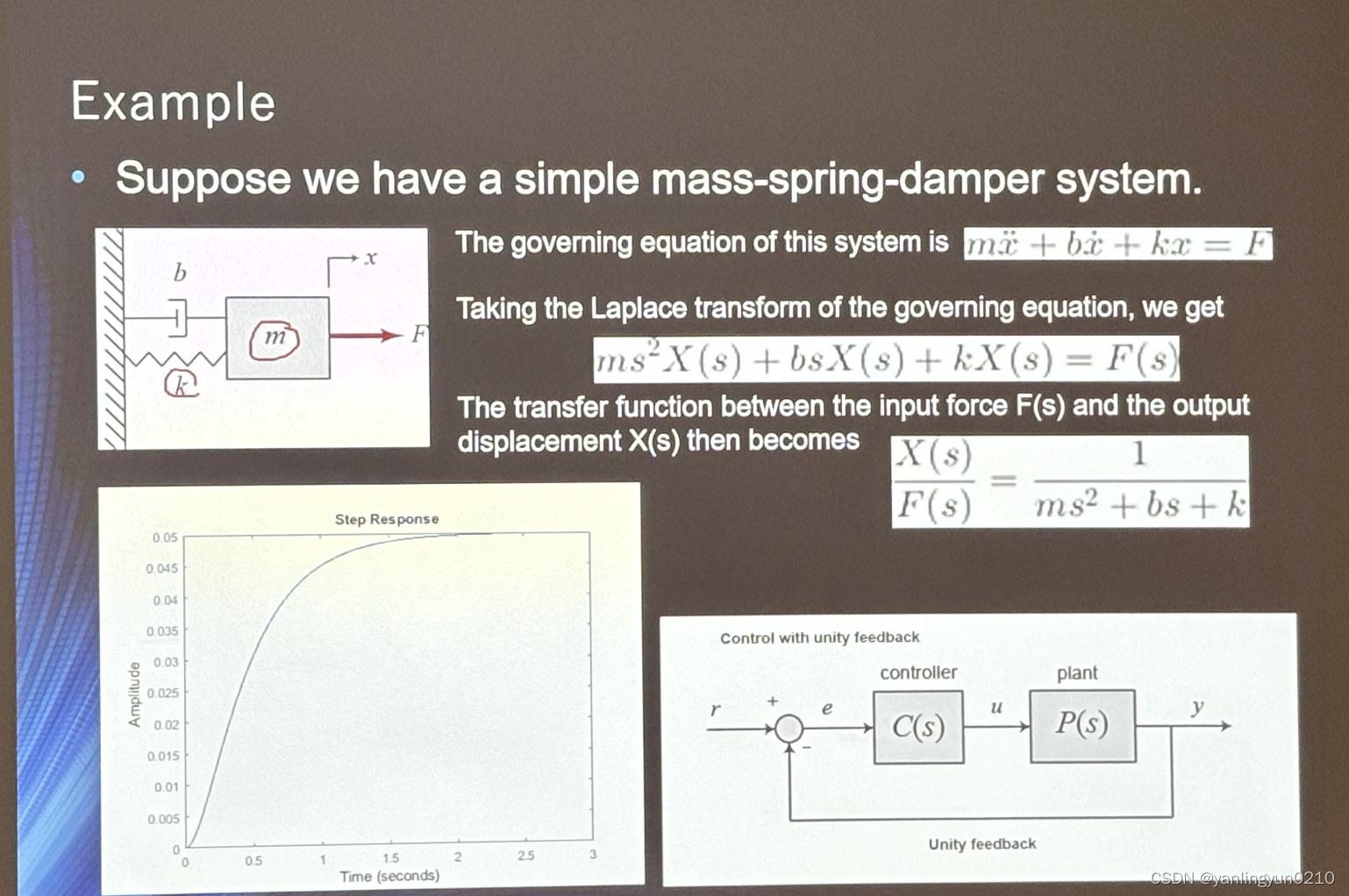

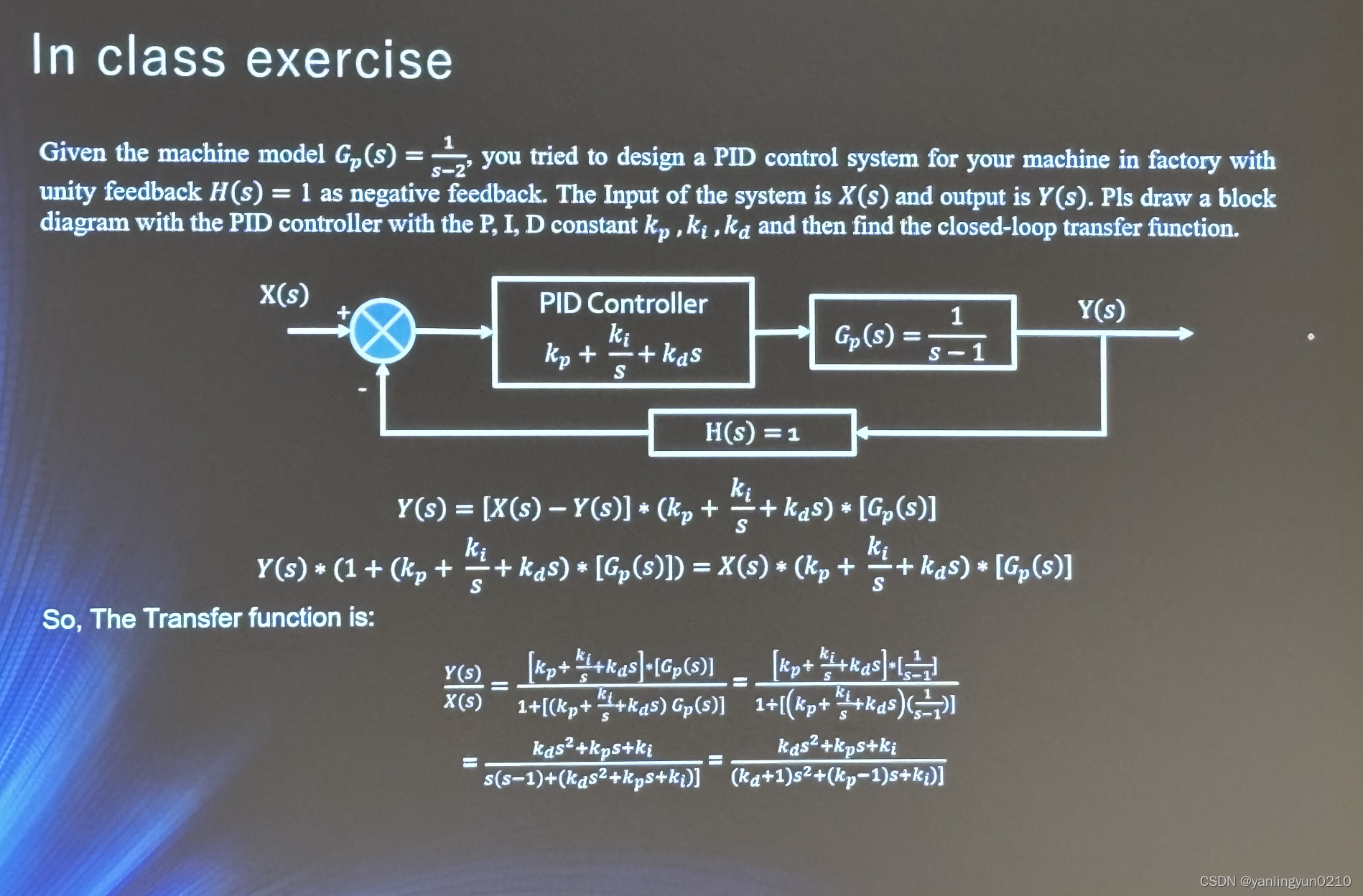
要设置一个PID控制器,需要先建立一个机器模型,即了解所控制的系统的动态特性和响应特性。一般来说,建立机器模型需要进行系统辨识,即通过实验或数学建模来获取系统的传递函数或状态空间模型。
然后,可以根据机器模型的特性来设置PID控制器的参数,包括比例系数KP、积分时间TI和微分时间TD。常见的调参方法包括手动调参、试错法、自适应控制和优化算法等。
手动调参是最常用的方法,通过调整KP、TI和TD等参数来优化PID控制器的性能。
一般来说,首先设置KP,使系统能够快速响应,但不产生过度振荡或超调;然后调整TI和TD,以消除稳态误差并抑制振荡和超调。调参过程需要通过实验或仿真来验证控制器的性能和稳定性。
试错法是一种自动调参方法,通过系统响应的特征来自动调整KP、TI和TD等参数。试错法可以快速找到最优参数,但需要进行大量的试验或仿真,并且可能导致系统不稳定或产生振荡。
自适应控制是一种根据系统响应实时调整PID参数的方法,可以根据系统的变化自动调整参数,以保持控制器的性能和稳定性。自适应控制需要更加复杂的控制算法和硬件实现,但可以提高控制器的鲁棒性和适应性。
优化算法是一种通过数学优化方法来自动调整PID参数的方法,可以通过优化目标函数来找到最优参数。优化算法需要进行大量的计算和优化过程,但可以找到最优的PID参数组合,以达到最佳控制效果。
总之,设置PID控制器需要根据具体的机器模型和应用需求来选择适当的调参方法和参数组合,以达到最佳的控制效果。
这篇关于EE5437-IOT(Lecture 07-Control Interface System)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




