kitti专题

KITTI提取gtbox并存为图片
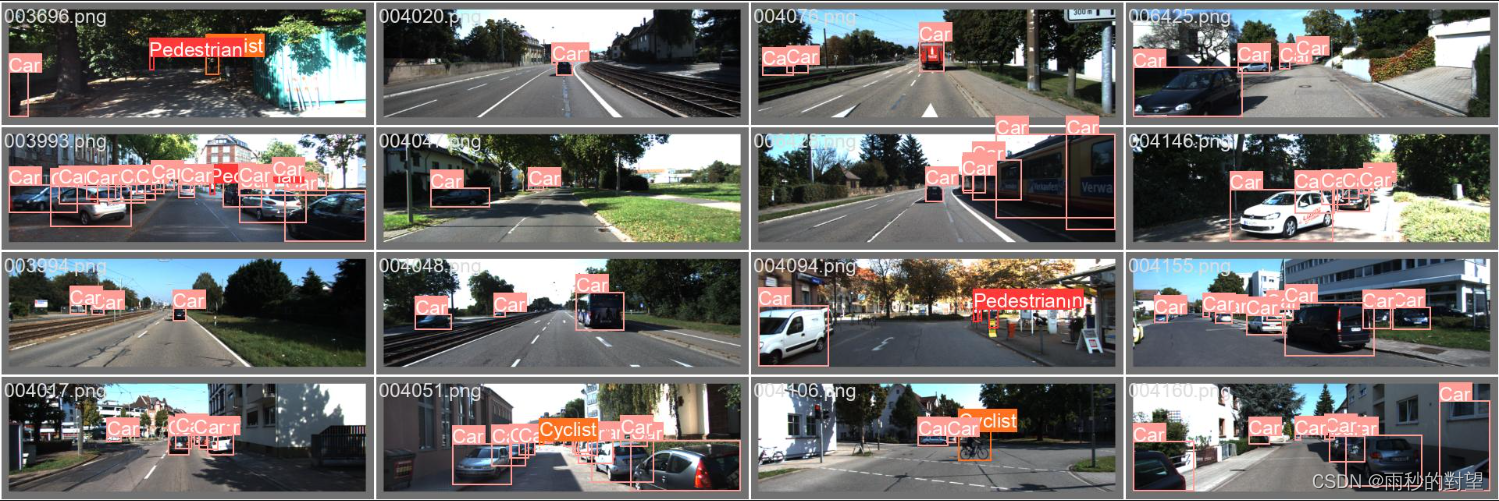
做人车分类,需要数据集,所以把KITTI中标定好的gtbox提取出来做成自己的数据集,代码实现参考了faster rcnn的源码。 第一步,数据准备 之前因为使用faster rcnn 训练了kitti的数据,所以对原始数据集已经做过修改,目前的label格式如下: 其中,第一位为图片索引,接着为整张图中的box的数量,然后是第一类的数量,接着便是第一类的box坐标。如果这一类没有就

Ubuntu20.04配置ORBSLAM2并在kitti数据集序列进行实验
一、ORB-SLAM2 安装和编译 1.ORB-SLAM2下载 用以下命令在终端上下载 git clone https://github.com/raulmur/ORB_SLAM2 2.安装Pangolin 在下载了ZIP压缩包后解压缩放在ubantu的/home下(此处只要是英文路径都可以),但别急着安装Pangolin我们还需要安装一些必要的库 sudo apt install l

KITTI数据中pose含义
Folder ‘poses’: The folder ‘poses’ contains the ground truth poses (trajectory) for the first 11 sequences. This information can be used for training/tuning your method. Each file xx.txt contains a N

基于open3d对kitti数据集检测结果可视化
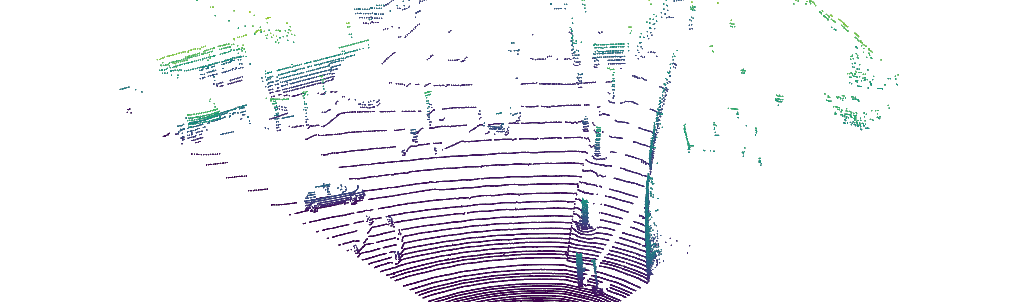
前言 KITTI数据集是自动驾驶和计算机视觉领域中一个广泛使用的基准数据集,它提供了丰富的传感器数据,包括激光雷达、相机和GPS等。Open3D是一个功能强大的3D数据处理和可视化库,支持多种3D数据格式。本文将介绍如何使用Open3D对KITTI数据集的检测结果进行可视化。 准备工作 确保你已经安装了Open3D库。如果尚未安装,可以通过pip安装: pip install open3d

YOLOV5训练KITTI数据集实践
目录 一、YOLOV5下载安装二、KITTI数据集三、标签格式转换四、修改配置文件五、训练六、测试 一、YOLOV5下载安装 git clone https://github.com/ultralytics/yolov5.gitconda create -n yolov5 python=3.8 -yconda activate yolov5cd yolov5pip ins

使用立体视觉作为 3D LiDAR 的替代方案,在 KITTI ADAS 立体视觉数据集上微调立体变换器 (STTR) 模型-含数据集+源码资料下载
为什么是立体视觉? ADAS 立体视觉是指使用两个摄像头(类似于人眼)从略有不同的角度捕获图像的技术。该设置模仿人类双眼视觉,使系统能够感知环境的深度和 3D 结构。 立体视觉的关键技术方面 ADAS 立体视觉具有多种优势和高度复杂的功能。让我们探索它们以更好地理解: 对极几何和深度估计:立体视觉依赖于对极几何,这是计算机视觉中的一个基本概念,描述了立体设置的两个视图之间的几何关系。通过
3D目标检测跟踪 | 基于kitti+waymo数据集的自动驾驶场景的3D目标检测+跟踪渲染可视化
项目应用场景 面向自动驾驶场景的 3D 目标检测+目标跟踪,基于kitti+waymo数据集的自动驾驶场景的3D目标检测+跟踪渲染可视化查看。 项目效果 项目细节 ==> 具体参见项目 README.md (1) Kitti detection 数据集结构 # For Kitti Detection Dataset └── kitti_detecti

【3D目标检测】Det3d—SE-SSD模型训练(前篇):KITTI数据集训练
SE-SSD模型训练 1 基于Det3d搭建SE-SSD环境2 自定义数据准备2.1 自定义数据集标注2.2 训练数据生成2.3 数据集分割 3 训练KITTI数据集3.1 数据准备3.2 配置修改3.3 模型训练 1 基于Det3d搭建SE-SSD环境 Det3D环境搭建参考:【3D目标检测】环境搭建(OpenPCDet、MMdetection3d、Det3d) SE-SS

两步成功实现在stereo-dso上运行kitti数据集
1. 双目DSO运行kitti数据集效果图 首先上图,图1是双目DSO在kitti的运行动图,下文将对如何实现双目DSO在kitti上运行进行详细介绍。有关双目DSO如何在ubuntu系统下安装请参看这里。 2. 运行KITTI 第一步,创建一个txt文件,将其命名为kitti.txt,将其保存在双目DSO目录文件夹下。在kitti.txt内写入以下内容: Pinhole 7.18856

从零开始在kitti数据集上训练yolov5
0.准备工作 0.1 在kitti官网下载kitti数据集 KITTI官网:https://www.cvlibs.net/datasets/kitti/eval_object.php?obj_benchmark=2d 只需要下载图片和标签 解压后应该有一个training和和testing文件夹,training文件夹下应该有一个image_2文件夹和一个label_2文件夹,分别对应训练集
KITTI 3D Object Detection Evaluation 结果评估程序
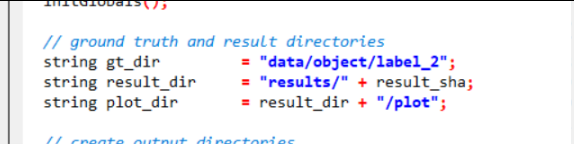
KITTI 3D Object Detection Evaluation 结果评估程序 KITTI 3D Object Detection结果评估程序下载程序(工具包)对预测结果进行评估1.预测结果存放格式2.标签和预测结果存放目录3.如何使用评估文件 KITTI 3D Object Detection结果评估程序 下载程序(工具包) 在对KITTI数据集进行预测得到结果后

处理KITTI数据集时的一些坑
原始数据 原始数据文件包括 training 和 testing 。对于 testing 没有什么好说的,因为就是一些点云文件,但是对于training需要我们自己划分val,同时训练时的真值都需要从其中的标注文件中读取。通常来说对于仅使用点云数据的同学们,我们的training文件夹下有 label_2:这是一个标注文件,标注每一个帧下的所有ground truth。 velodyne:这是蕴
使用 KITTI数据集训练YOLOX
1. 现在KITTI集后,首先将数据集转换为COCO数据集格式。 kitti_vis.py import osfrom pathlib import Pathimport numpy as npimport cv2def anno_vis(img, anno_list):for anno in anno_list:points = np.array(anno[4:8], dtype=

VINS-fusion 跑通Euroc、TUM、KITTI数据集,以及评估工具EVO的下载和使用
零、EVO工具获取与使用 ubuntu20.04中python版本是3.x,因此对应的pip工具会变成pip3,可以先参考如下链接查看自己系统的python和pip版本。 Ubuntu20.04安装evo(详细教程)【亲测有效】_ubantu20.04 evo_学无止境的小龟的博客-CSDN博客 再调用如下命令对evo工具进行安装 pip3 install evo --upgrade --

colmap 已知pose 重建 kitti数据尝试
Frequently Asked Questions — COLMAP 3.7 documentation COLMAP已知相机内外参数重建稀疏/稠密模型 - thronsbird - 博客园 Colmap根据相机内外参数重建稀疏模型_m0_47677188的博客-CSDN博客_colmap 命令行 准备 images.txt 现利用 colmap的script 提取database中

kitti数据集calib_cam_to_cam.txt 理解
所有相机在同一 x / y x/y x/y 平面,可以进行联合标定 Here, i ∈ 0 , 1 , 2 , 3 i ∈ {0, 1, 2, 3} i∈0,1,2,3 is the camera index, where 0 represents the left grayscale, 1 the right grayscale, 2 the left color and 3 the righ

kitti数据集:kitti_raw_data中“calib_cam_to_cam.txt”文件内容解释
来自:http://www.cvlibs.net/publications/Geiger2013IJRR.pdf calib_cam_to_cam.txt: calib_time: 09-Jan-2012 13:57:47corner_dist: 9.950000e-02S_00: 1.392000e+03 5.120000e+02K_00: 9.842439e+02 0.000000e
KITTI数据集解读
目录 1.KITTI数据集概述 2.数据采集平台 3.Dataset详述 3.1 数据组织形式 3.2 Development Kit 3.3 GPS/IMU位姿数据

【OpenPCDet代码阅读日记】【kitti_dataset.py】
1.Python中sys.argv的用法 https://blog.csdn.net/csdn15698845876/article/details/74909089 2.Python -m 的含义 将模块用作脚本去运行 https://www.cnblogs.com/maoguy/p/6670988.html 3.yaml入门 https://www.runoob.com/w3cn
【从kitti开始自动驾驶】--7.2 实现3d侦测框(移植至ROS,显示于RVIZ)
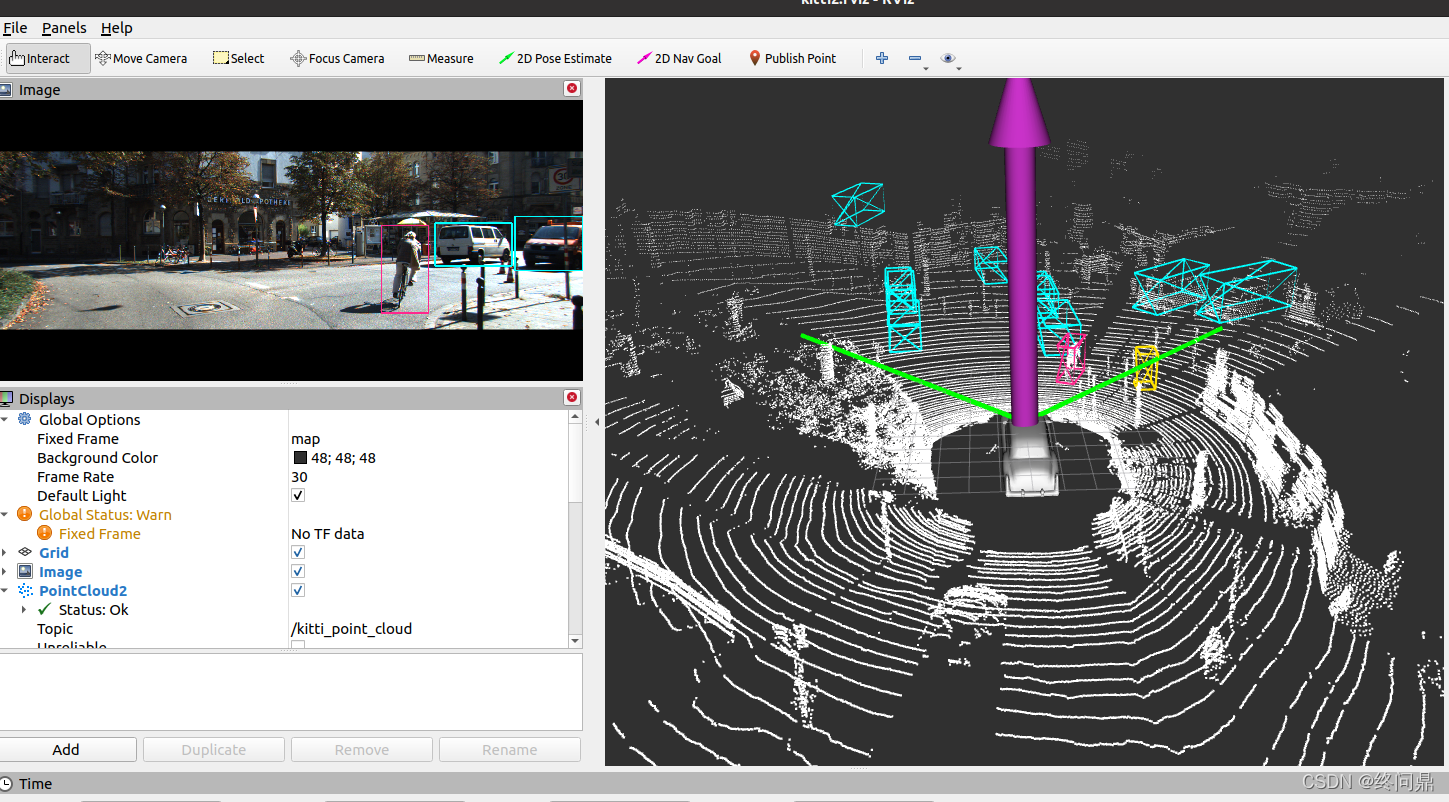
“天意终究难参” 1 kitti_all中的改动1.1 准备工作1.2 发布者建立1.3 矫正的instance读取1.4 所需数据提取转为数组1.5 为每个object都画框1.6 执行发布函数 2 publish_utils中的改动2.1 变量定义2.2 为不同object加入不同颜色2.3 maker_array操作2.4 大遍历每一个object2.5 小遍历每两个点2.6 发布 3
![ROS1结合自动驾驶数据集Kitti开发教程(九)画出3D检测框[1]](https://img-blog.csdnimg.cn/810b2de44794474faaf576accf3b4465.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3hpYW9rYWkxOTk5,size_16,color_FFFFFF,t_70#pic_center)
ROS1结合自动驾驶数据集Kitti开发教程(九)画出3D检测框[1]
注意: 再学习本系列教程时,应该已经安装过ROS了并且需要有一些ROS的基本知识 ubuntu版本:20.04 ros版本:noetic 课程回顾 ROS1结合自动驾驶数据集Kitti开发教程(一)Kitti资料介绍和可视化 ROS1结合自动驾驶数据集Kitti开发教程(二)发布图片 ROS1结合自动驾驶数据集Kitti开发教程(三)发布点云数据 ROS1结合自动驾驶数据集Kitti开发教
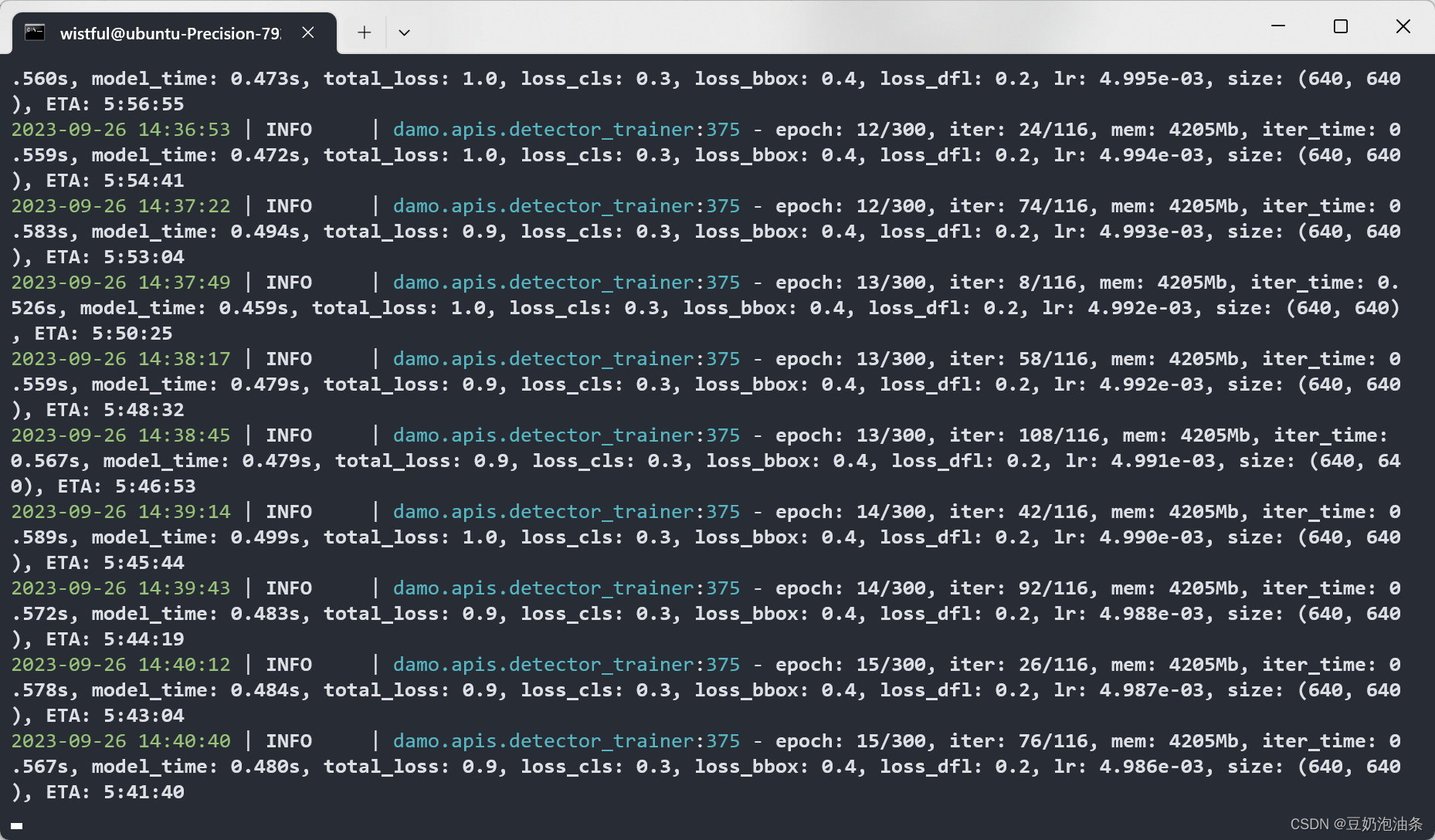
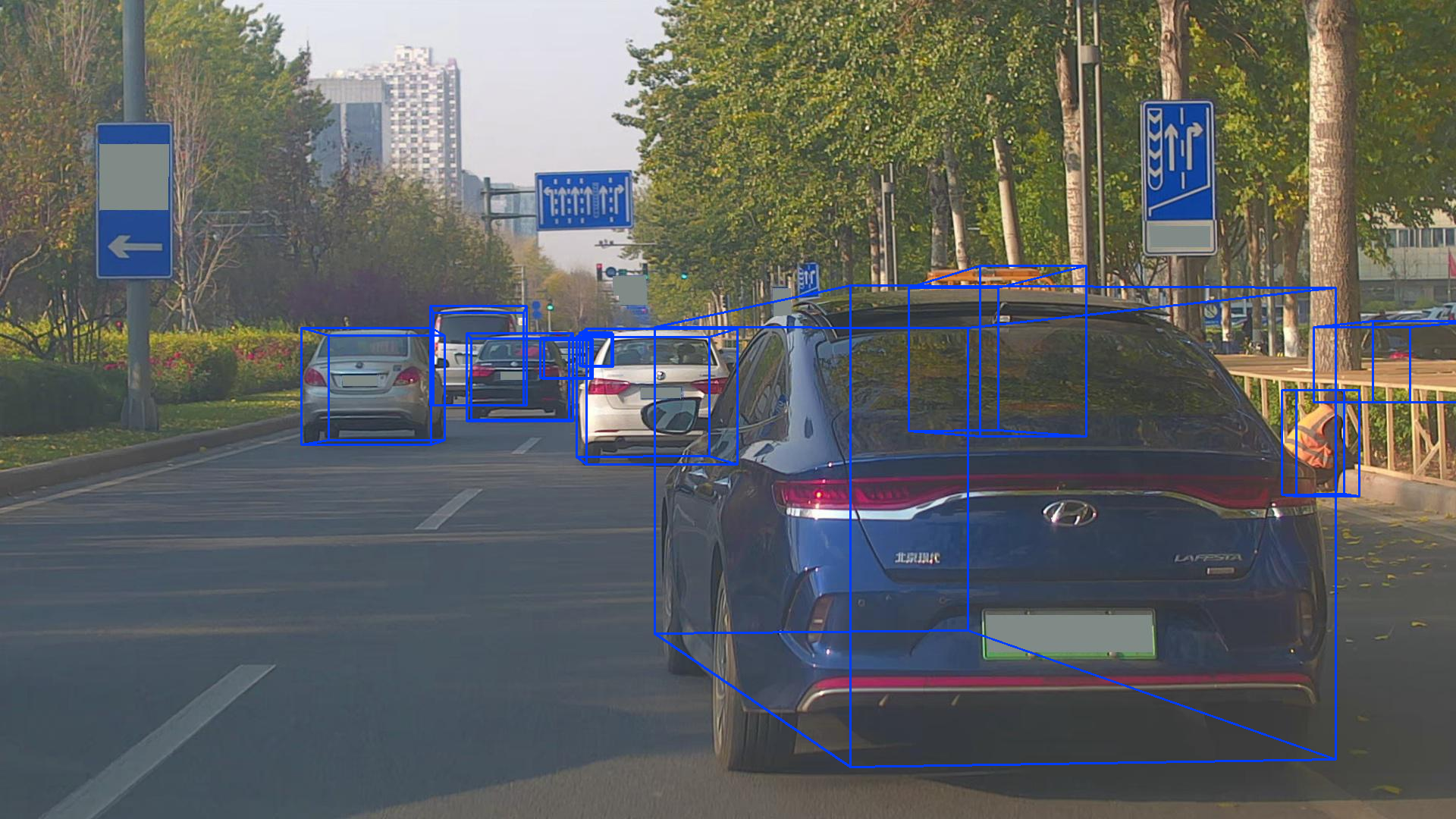
DAMO-YOLO训练KITTI数据集
1.KITTI数据集准备 DAMO-YOLO支持COCO格式的数据集,在训练KITTI之前,需要将KITTI的标注转换为KITTI格式。KITTI是采取逐个文件标注的方式确定的,即一张图片对应一个label文件。下面是KITTI 3D目标检测训练集的第一个标注文件:000000.txt Pedestrian 0.00 0 -0.20 712.40 143.00 810.73 307.92 1
DAIR-V2X-V 3D检测数据集 转为Kitti格式 | 可视化
本文分享在DAIR-V2X-V数据集中,将标签转为Kitti格式,并可视化3D检测效果。 一、将标签转为Kitti格式 DAIR-V2X包括不同类型的数据集: DAIR-V2X-IDAIR-V2X-VDAIR-V2X-CV2X-Seq-SPDV2X-Seq-TFDDAIR-V2X-C-Example: google_drive_linkV2X-Seq-SPD-Example: goo
DAIR-V2X-V 3D检测数据集 转为Kitti格式 | 可视化
本文分享在DAIR-V2X-V数据集中,将标签转为Kitti格式,并可视化3D检测效果。 一、将标签转为Kitti格式 DAIR-V2X包括不同类型的数据集: DAIR-V2X-IDAIR-V2X-VDAIR-V2X-CV2X-Seq-SPDV2X-Seq-TFDDAIR-V2X-C-Example: google_drive_linkV2X-Seq-SPD-Example: goo
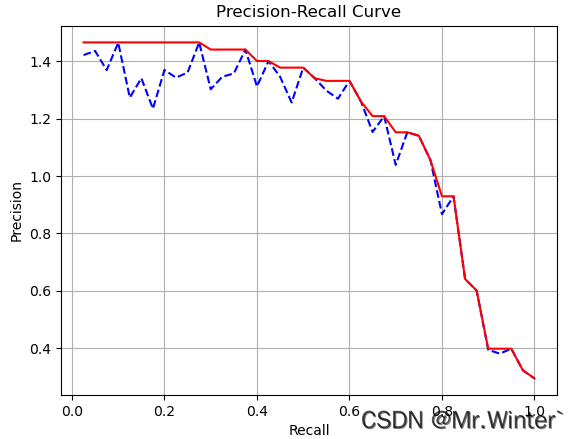
3D目标检测实战 | 图解KITTI数据集评价指标AP R40(附Python实现)
目录 1 准确率和召回率2 P-R曲线的绘制3 AP R11与AP R40标准4 实际案例 1 准确率和召回率 首先给出 T P TP TP、 F P FP FP、 F N FN FN、 T N TN TN的概念 真阳性 True Positive T P TP TP 预测为正(某类)且真值也为正(某类)的样本数,可视为 I o U > I o U t h r e s h o