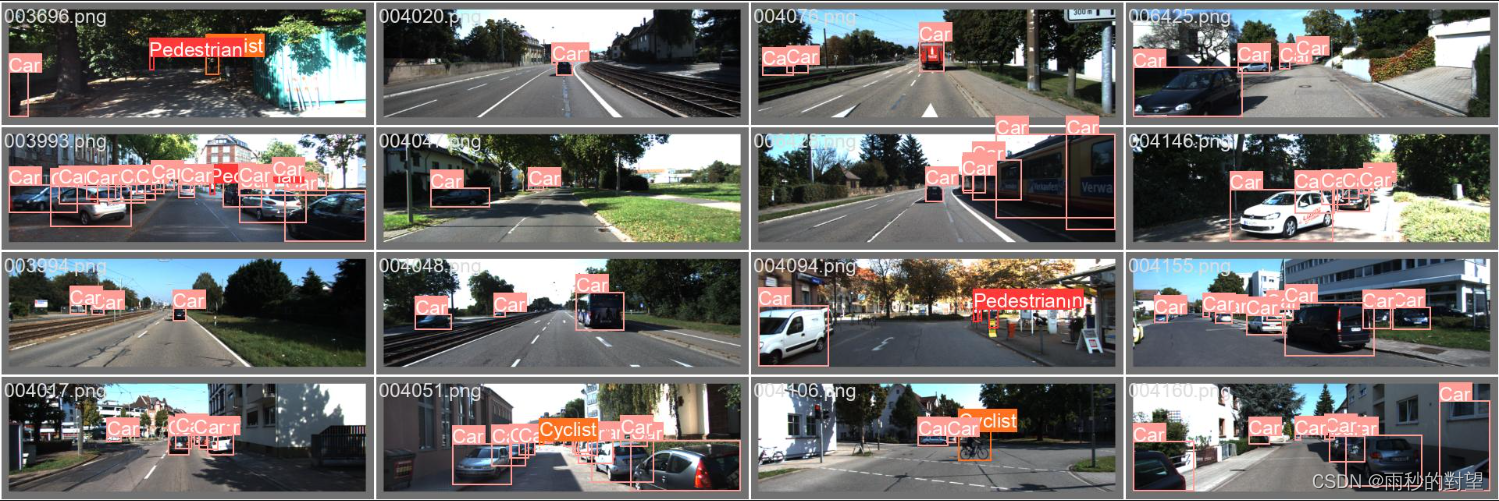
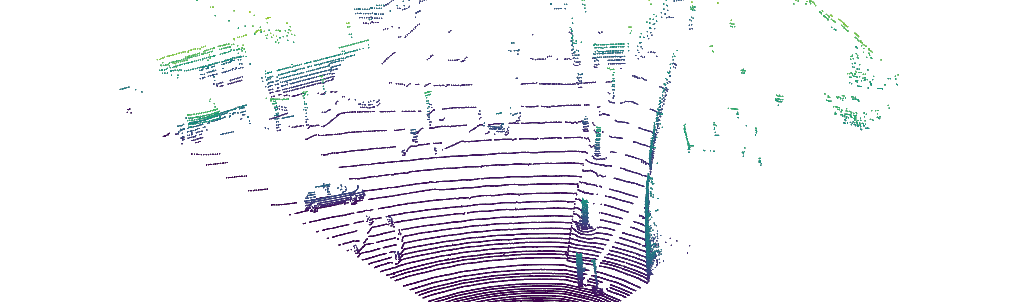
本文主要是介绍KITTI,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
使用mac m1为硬件
- 使用UTM作为虚拟机
- 下载ubuntu arm镜像
-
- 20.04: Ubuntu 20.04.5 LTS (Focal Fossa)
- 22.04: Ubuntu 22.04.4 LTS (Jammy Jellyfish) Daily Build
- 20.04只有server版本, 安装时, 默认全不选.
-
- 进入系统后安装界面:
sudo apt install ubuntu-desktop - 配置清华源
- 进入系统后安装界面:
这篇关于KITTI的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!