ekf专题

【PSINS】SINS与航位推算的EKF例程讲解|三维轨迹
文章目录 SINS与航位推算例程构造滤波前滤波主体滤波后处理 运行结果源代码 SINS与航位推算 SINS是捷联惯导,略。 航位推算: 本文讲解的程序是PSINS工具箱(相关文章:PSINS初学指导,https://blog.csdn.net/callmeup/article/details/136459824)的一个函数,在此基础上进行优化。如果要运行,需要先安装工具箱

2-82 基于matlab的多种工况下融合EKF的AUV定位误差
基于matlab的多种工况下融合EKF的AUV定位误差,工况1:AUV工况2:应答器基阵+速度传感器+角度传感器;工况3:AUV和AUV+速度传感器+角度传感器;工况4:应答器基阵;工况5:AUV和AUV+速度传感器+角度传感器+应答器基阵。程序已调通,可直接运行。 2-82 EKF的AUV定位误差 - 小红书 (xiaohongshu.com)

【逐行注释】三维EKF的MATLAB代码|附下载链接
文章目录 程序概况源代码与注释运行结果代码块解析 程序概况 基于MATLAB的EKF(扩展卡尔曼滤波)代码解析。状态转移和观测都是非线性的,也就是说会涉及到雅克比矩阵的求解。我尽量将模型设计复杂一点,便于拿到手以后改成自己想要的形式。 源代码与注释 下载链接(需付费,谨慎消费):https://download.csdn.net/download/callmeup/8967

基于EKF的姿态解算
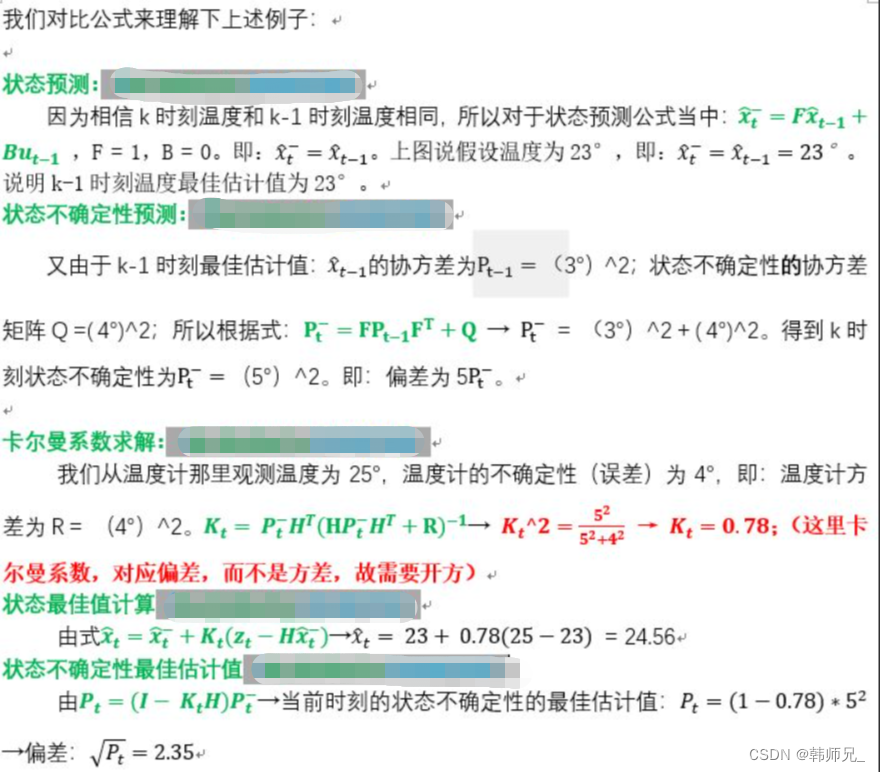
首先一个最为基本的公式(我去,怎么编写公式啊?):; 其中;。 由此,我们可以得出状态方程:step1: ,。 计算协方差矩阵 step2: ; Q 为过程噪声。
EKF在LiFePO4电池SOC估算中不好用?一问带你破解EKF应用难题
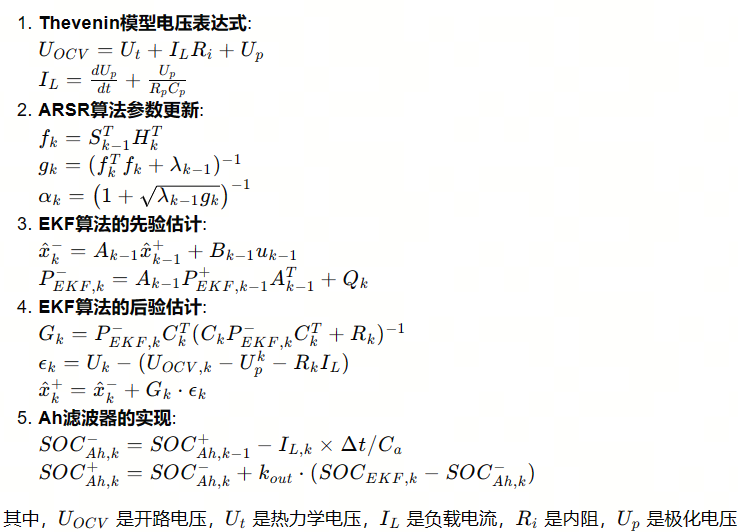
磷酸铁锂电池因为平台区的存在,导致使用戴维南模型+EKF的方法时,无法准确进行SOC准确预估。所以最近搜索了大量关于磷酸铁锂电池SOC预估的论文、期刊,但我被海量忽略客观事实、仅为了毕业的硕士论文给震惊到了。很多论文为了掩饰平台区的存在,人为伪造平台区的压差数据进行建模,有些SOC上下跳变3-8%以上(想像你开电动车时,发现剩余电量在5%上下跳变,就问你怕不怕 ) ,有些预估的OCV差异20mV以

【附源码+代码注释】误差状态卡尔曼滤波(error-state Kalman Filter),扩展卡尔曼滤波,实现GPS+IMU融合,EKF ESKF GPS+IMU
2023年9月4日更新:重构代码,修复代码BUG,修复公式错误,统一坐标系。 2021年6月23日更新:发现了一个讲卡尔曼滤波特别好的视频,但是需要科学上网。卡尔曼滤波视频 最近在学习卡尔曼滤波器,今天抽出点儿时间总结一下! 我的所有源码都放在Github的仓库里面了:https://github.com/zm0612/eskf-gps-imu-fusion(记得要给我点star呀,哈哈
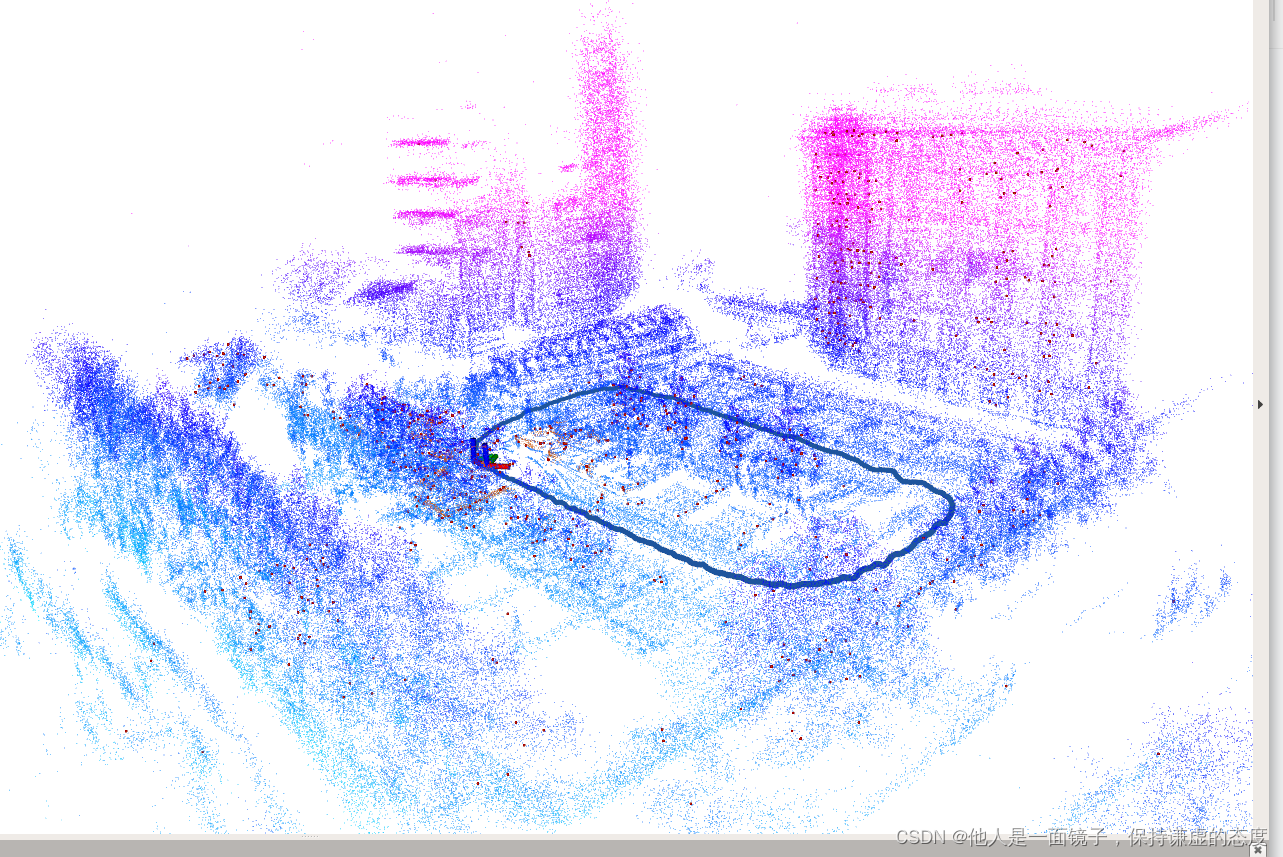
LIO-EKF: 运行数据UrbanNav与mid360设备详细教程
一、代码连接 代码下载连接: YibinWu/LIO-EKF: Maybe the simplest LiDAR-inertial odometry that one can have. (github.com) 编译步骤: cd srcgit clone git@github.com:YibinWu/LIO-EKF.gitcatkin_makesource devel/setup.bas

卡尔曼滤波_3(EKF)
wiki原文 EKF 在估计理论中,EKF是KF的非线性版本,对当前估计的均值和协方差进行线性化。如果状态转移模型很准确的话,EKF会是非线性状态估计理论、导航系统、GPS中最好的方法。 历史 创造卡尔曼滤波器的论文发表于上世纪60年代。卡尔曼滤波器对于线性系统模型,在状态转移系统和测量系统中加上独立白噪声下,都是最有估计器。然而,实际应用问题中,大部分都是非线性系统,

【运动学】基于matlab EKF姿态估计【含Matlab源码 1638期】
⛄一、获取代码方式 获取代码方式1: 完整代码已上传我的资源:【运动学】基于matlab EKF姿态估计【含Matlab源码 1638期】 点击上面蓝色字体,直接付费下载,即可。 获取代码方式2: 付费专栏Matlab物理应用(初级版) 备注: 点击上面蓝色字体付费专栏Matlab物理应用(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab物理应用(初级版),凭支付

基于ES-EKF的LiDAR/GNSS/IMU传感器融合轨迹估计(附项目源码)
基于改进EKF的LiDAR/GNSS/IMU传感器融合轨迹估计(附项目源码) 算法概述PredictionCorrectionES-EKF算法融合算法实现轨迹估计实验结果 最近在研究传感器融合,看到一个很好的开源项目,适合小白学习,为以后做传感器融合、SLAM、自动驾驶和室内定位等方向打下基础。 算法概述 题目:基于改进扩展卡尔曼滤波(Error State-EKF)的LiD

协同导航的MATLAB程序,采用EKF作为滤波算法
背景 单领航者,跟踪者对领航者进行测距 基于移动向量的协同定位 系统逻辑 两个节点,一个有GNSS和INS,是经典的导航,作为领航者。另一个节点为跟踪者,仅有INS,同时可以测量与领航者之间的距离。 使用协同导航的思想,对跟踪者试试确定位置。 滤波方法使用扩展卡尔曼滤波EKF。 程序源码 % 单领航者 仅测距,基于移动向量(Moving Radius Vector,MRV)的协同定位%
EKF+CDKF两个滤波的MATLAB程序,估计三轴位置,带中文注释
背景 CDKF(中心差分卡尔曼滤波)是一种值得关注的确定性采样方法。与UKF(无迹卡尔曼滤波)不同,CDKF选取采样点的方式基于Sterling多项式插值公式,并以中心差分形式逼近非线性函数,达到至少2阶的近似精度。 CDKF的精度与UKF相当,但只需调整一个参数h。因此,在目标跟踪、导航系统等领域,CDKF都有良好的应用前景 。 源码 % EKF+CDKF效果对比% author:Ev
姿态估计(2)—— 扩展卡尔曼滤波(Extended Kalman Filter—EKF)
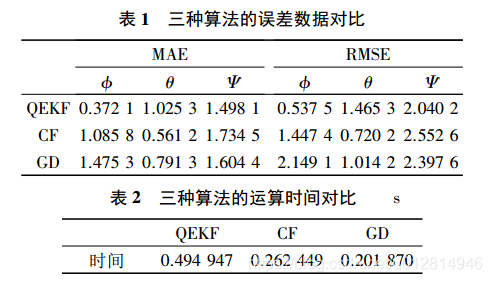
版权声明:本文为博主原创博文,未经允许不得转载,若要转载,请说明出处并给出博文链接 这里主要选取了文章中的部分要点予以展示,有兴趣的可以去看下全文《基于QEKF的四旋翼飞行器姿态估计》。想要进一步了解互补滤波的可以看这里姿态估计(1)——互补滤波(Complementary filter ) 在
EKF+CKF对比程序
三维滤波,非线性系统状态与非线性观测,使用EKF和CKF进行滤波,输出滤波值曲线与误差对比,MATLAB程序如下: % EKF+CKF效果对比% author:Evand% 作者联系方式:evandjiang@qq.com(除前期达成一致外,付费咨询)% date: 2023-12-05% Ver1clear;clc;close all;%% 滤波模型初始化t = 1:1:1000
ROS 下navigation/robot_pose_ekf编译报错
想要使用navigation下的robot_pose_ekf做IMU与视觉的融合于是找到了这个包:https://github.com/ros-planning/navigation/tree/indigo-devel 但是编译报错: – package ‘orocos-bfl’ not found CMake Error at /usr/share/cmake-2.8/Modules/F

扩展卡尔曼滤波(Extended Kalman Filter, EKF):理论和应用
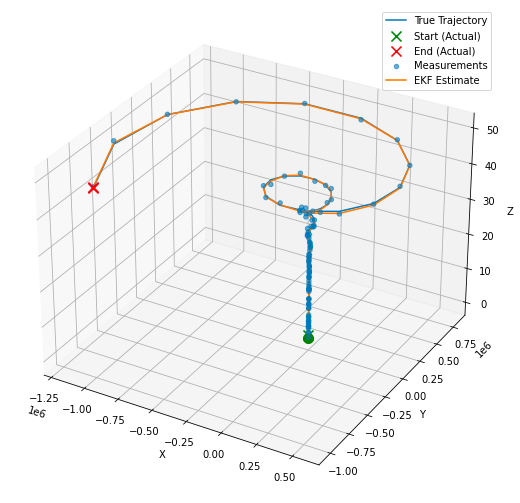
扩展卡尔曼滤波(Extended Kalman Filter, EKF):理论、公式和应用 引言 卡尔曼滤波是一种广泛应用于估计动态系统状态的技术,但当系统的动态模型或测量模型是非线性的时候,传统的卡尔曼滤波方法就显得无能为力。扩展卡尔曼滤波通过引入非线性系统的雅可比矩阵,弥补了这一不足,成为处理非线性系统估计的有力工具。本文将介绍扩展卡尔曼滤波的理论基础、数学公式,并通过Python代码示例

卡尔曼滤波(KF)和增广卡尔曼滤波(EKF)实现
卡尔曼滤波(KF) python实现: import numpy as npF = np.array([[1, 1], [0, 1]]) # 状态转移矩阵 X(k+1)=[[1, Δt], [0, 1]]*X(k) Δt=1Q = 0.1 * np.eye(2, 2) # 过程噪声协方差矩阵R = 0.1 * np.eye(2, 2) # 观测噪声协方

扩展卡尔曼滤波EKF,与LKF区别。IMU and GPS Fusion for Inertial Navigation,MATLAB实例学习。
MATLAB:Sensor Fusion and Tracking Toolbox 实例一:IMU and GPS Fusion for Inertial Navigation 一、IMUandGPSFusionExample.m 1、IMU的加速度计、陀螺仪的采样频率很高。Conversely,磁力计与GPS的采样频率较低。 2、数据: IMU:

PX4的关键模块代码在src文件夹下,位置环控制,姿态环控制,EKF,各个传感器的驱动。
PX4的关键模块代码在src文件夹下,位置环控制,姿态环控制,EKF,各个传感器的驱动。 PX4的关键模块代码在src文件夹下,位置环控制,姿态环控制,EKF,各个传感器的驱动。 结合《一本书看懂多旋翼》这本书来看 这么来看其实PX4代码也不复杂,
构建和应用卡尔曼滤波器 (KF)--扩展卡尔曼滤波器 (EKF)
作为一名数据科学家,我们偶尔会遇到需要对趋势进行建模以预测未来值的情况。虽然人们倾向于关注基于统计或机器学习的算法,但我在这里提出一个不同的选择:卡尔曼滤波器(KF)。 1960 年代初期,Rudolf E. Kalman 彻底改变了使用 KF 建模复杂系统的方式。从引导飞机或航天器到达目的地,到让您的智能手机找到它在这个世界上的位置,该算法融合了数据和数学,以令人难以置信的准确性提供对未来状态
基于一阶RC模型,电池带遗忘因子递推最小二乘法+扩展卡尔曼滤波算法(FFRLS+ EKF),参数与SOC的在线联合估计
基于一阶RC模型,电池带遗忘因子递推最小二乘法+扩展卡尔曼滤波算法(FFRLS+ EKF),参数与SOC的在线联合估计,matlab程序 YID:76100659957301925
ardupilot开发 --- EKF 篇
1. EKF1~EKF3 待续… 2. Ardupilot滤波算法的演变 使用DCM还是EKF? AHRS_EKF_USE: set to “1” to use the EKF, “0” to use DCM for attitude control and inertial nav (Copter-3.2.1) or ahrs dead reckoning (Plane) for pos

非线性滤波——基于EKF的INS/GPS松组合算法的研究(间接法|EKF|欧拉角)
在之前的博文《非线性滤波——基于EKF的INS/GPS松组合算法的研究(直接法|EKF|欧拉角)》中,我们记录了直接形式的EKF实现INS/GPS松组合算法,并在《卡尔曼滤波——直接法VS间接法》中对比说明了直接法与间接法的优劣。本文,我们记录使用间接反馈校正形式的EKF算法实现INS/GPS松组合算法。 建立模型 本文的INS/GPS组合模型主要参考文献: Barton, Jeffrey.

惯性导航解决方案ADIS16448+tbus-tiny_ekf测评
忽然感觉TBUS牛逼,真的是深钻了一些算法,真正解决了些问题,单靠IMU实现定位都做出来了,牛逼。 最新的他们好像是用中心差分卡尔曼滤波了,可以看到他们在状态估计上花了很大的力气。 转载自:https://mp.weixin.qq.com/s/m-oBzlFWMuzRkwJrM1J0wg 惯性导航解决方案ADIS16448+tbus-tiny_ekf测评 原创 凌拓智能TBUS TB