本文主要是介绍姿态估计(2)—— 扩展卡尔曼滤波(Extended Kalman Filter—EKF),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
版权声明:本文为博主原创博文,未经允许不得转载,若要转载,请说明出处并给出博文链接
这里主要选取了文章中的部分要点予以展示,有兴趣的可以去看下全文《基于QEKF的四旋翼飞行器姿态估计》。想要进一步了解互补滤波的可以看这里姿态估计(1)——互补滤波(Complementary filter )
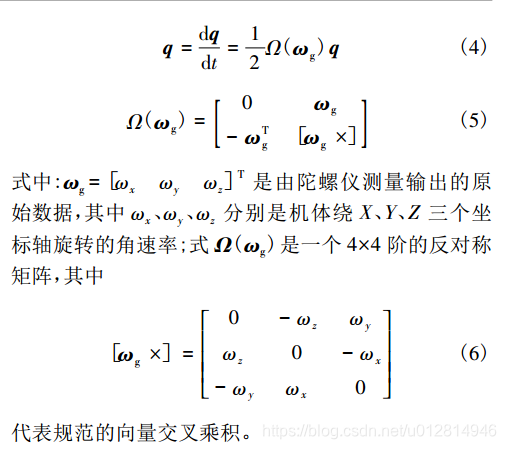
在捷联惯性导航系统中, 四元数微分方程与角速度的关系,如下式所示
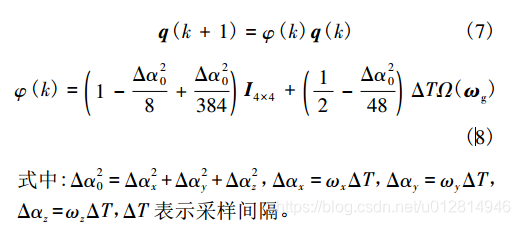
文章中采用了四阶毕卡逼近算法对离散四元数差分方程进行求解
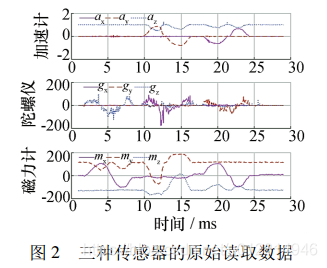
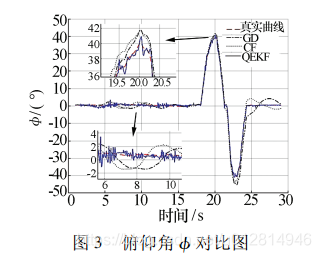
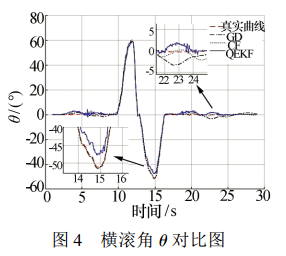
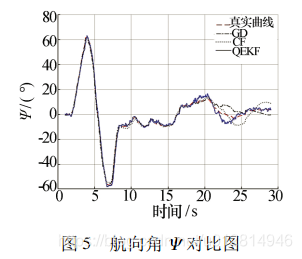
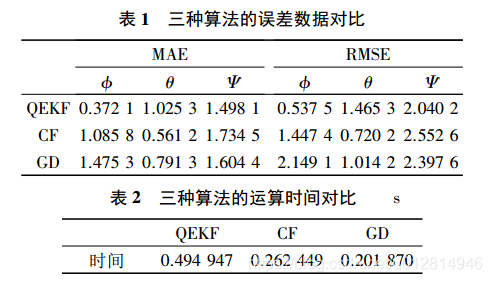
最后将传感器的原始数据,以及经过QEKF算法估计出来的姿态角进行仿真,也与互补滤波和梯度下降法进行了算法性能对比。
这篇关于姿态估计(2)—— 扩展卡尔曼滤波(Extended Kalman Filter—EKF)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




