kalman专题

风速预测 | 基于MATLAB的无迹卡尔曼滤波算法UKF、SVR-UKF、ANN-Kalman等时间序列风速预测模型
基本描述 基于MATLAB的无迹卡尔曼滤波算法UKF、SVR-UKF、ANN-Kalman等时间序列风速预测模型 模型步骤 时间序列风速预测模型基于MATLAB的无迹卡尔曼滤波算法(Unscented Kalman Filter, UKF)、SVR-UKF(Support Vector Regression - Unscented Kalman Filter)和ANN-Kalman(Arti

卡尔曼滤波(Kalman Filtering)详细解读
🧑🎓 个人主页:《爱蹦跶的大A阿》 🔥当前正在更新专栏:《VUE》 、《JavaScript保姆级教程》、《krpano》、《krpano中文文档》 ✨ 前言 卡尔曼滤波(Kalman Filtering)是一种用于估计动态系统状态的递推算法,被广泛应用于控制系统、信号处理、经济学、导航和机器人学等领域。它是由瑞典数学家鲁道夫·卡尔曼(Rudolf E. Kalm

【附源码+代码注释】误差状态卡尔曼滤波(error-state Kalman Filter),扩展卡尔曼滤波,实现GPS+IMU融合,EKF ESKF GPS+IMU
2023年9月4日更新:重构代码,修复代码BUG,修复公式错误,统一坐标系。 2021年6月23日更新:发现了一个讲卡尔曼滤波特别好的视频,但是需要科学上网。卡尔曼滤波视频 最近在学习卡尔曼滤波器,今天抽出点儿时间总结一下! 我的所有源码都放在Github的仓库里面了:https://github.com/zm0612/eskf-gps-imu-fusion(记得要给我点star呀,哈哈
卡尔曼滤波(Kalman filtering)小结
最近项目用到了kalman滤波,本博文简单介绍下卡尔曼滤波器的概念、原理和应用,做个小结。 概念 卡尔曼滤波(Kalman filtering)一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。 斯坦利·施密特(Stanley Schmidt)首次实现了卡尔曼滤波器。卡尔曼在NASA埃

简单理解Kalman滤波
以下内容来自https://www.cnblogs.com/Jessica-jie/p/6893473.html 1.卡尔曼滤波中的真实值,测量值,预测值,估计值怎么区分? 他的5条公式是其核心内容,结合现代的计算机,其实卡尔曼的程序相当的简单,只要你理解了他的那5条公式. 用一个简单的小例子:假设我们要研究的对象是一个房间的温度。根据你的经验判断,这个房间的温度是恒定的, 也就是现在这一分钟
kalman-filter python实现?
上代码 import numpy as npclass KalmanFilter(object):def __init__(self, F = None, B = None, H = None, Q = None, R = None, P = None, x0 = None):if(F is None or H is None):raise ValueError("Set proper syst
![[转]Kalman滤波](https://img-blog.csdn.net/20160604160310667)
[转]Kalman滤波
Kalman滤波是一种递归过程,主要有两个更新过程:时间更新和观测更新,其中时间更新主要包括状态预测和协方差预测,主要是对系统的预测,而观测更新主要包括计算卡尔曼增益、状态更新和协方差更新,因此整个递归过程主要包括五个方面的计算:1)状态预测;2)协方差预测;3)卡尔曼增益;4)状态更新;5)协方差更新; 用数学公式表示,如下: 状态预测: (1)
kalman滤波的一些理解
对卡尔曼滤波算法的一丝淡淡理解 (2014-01-15 22:06:54) 转载▼ 分类: 专业积累 最近看卡尔曼滤波,网上广为流传着几篇的科普文章,但是都夹杂着一堆复杂的公式,看的我如坠云雾里。我希望能看到一篇没有复杂数学公式的文章,却一直没找到。 于是我想写一篇,讲讲自己对卡尔曼滤波的浅显理解。 我觉得卡尔曼滤波算法本质上是一个递推反馈算法。它分两

利用Python创建Kalman滤波器用于多普勒测速目标跟踪
利用Python构造Kalman滤波器和拓展卡尔曼滤波器Class用于目标跟踪 文章目录 利用Python构造Kalman滤波器和拓展卡尔曼滤波器Class用于目标跟踪Kalman滤波概述Kalman滤波器Python类线性动力学、线性观测所有代码 Kalman滤波概述 其基本思路是: 新的最佳估计基于原最佳估计和已知外部影响校正后得到的预测。新的不确定性基于原不确定性和
姿态估计(2)—— 扩展卡尔曼滤波(Extended Kalman Filter—EKF)
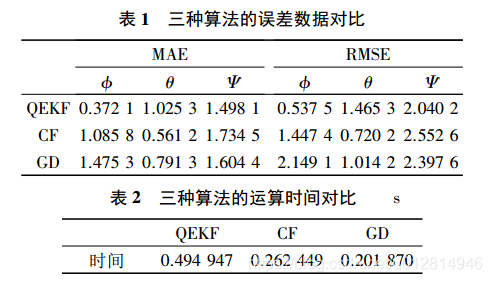
版权声明:本文为博主原创博文,未经允许不得转载,若要转载,请说明出处并给出博文链接 这里主要选取了文章中的部分要点予以展示,有兴趣的可以去看下全文《基于QEKF的四旋翼飞行器姿态估计》。想要进一步了解互补滤波的可以看这里姿态估计(1)——互补滤波(Complementary filter ) 在

kalman 卡尔曼滤波器
理论基础 为什么需要协方差? 标准差和方差一般是用来描述一维数据的,但现实生活中我们常常会遇到含有多维数据的数据集,最简单的是大家上学时免不了要统计多个学科的考试成绩。面对这样的数据集,我们当然可以按照每一维独立的计算其方差,但是通常我们还想了解更多,比如,一个男孩子的猥琐程度跟他受女孩子的欢迎程度是否存在一些联系。协方差就是这样一种用来度量两个随机变量关系的统计量,我们可以仿照方差的定

Kalman Filter与RLS的区别
1.估计准则 常用的估计准则包括: 无偏估计:即假设状态的估计值与真实值的平均值相等。最小二乘估计:不考虑数据的统计特性,如期望,方差等,直接用最小二乘法得到最优估计。误差方差最小:在满足最小二乘估计的同时,使得估计的误差方差最小。这一约束可以通过一系列等价的推导获得,前提是要事先知道测量数据噪声的方差。 简单来说就是,满足误差方差最小必满足误差平方和最小,反之不成立。而无偏估计是最基本假设。
对Kalman(卡尔曼)滤波器的理解
1.简介(Brief Introduction) 在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”。跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人! 卡尔曼全名Rudolf Emil Kalman,匈牙利数学家,1930年出生于匈牙利首都布达佩斯。1953,1954年于麻省理工学院分别获得电机工程学士及硕士学位。1957年于哥伦比
跟踪算法(二)Kalman filter跟踪
COPY FROM:http://www.cnblogs.com/feisky/archive/2009/11/09/1599247.html 1.什么是卡尔曼滤波器 (What is the Kalman Filter?) 在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”。跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人!
![[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-5+6](https://img-blog.csdnimg.cn/direct/3ec3f5756ce14450b76d20641d9ce807.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-5+6
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - Kalman Filter卡尔曼滤波器 Ch05-5+6 5. An Example 2D例子6. Extended Kalman Filter扩展卡尔曼滤波器(EKF) 5. An Example 2D例子 6. Extended Kalman Filter扩展卡尔曼滤波器(EKF)
![[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-3+4](https://img-blog.csdnimg.cn/direct/9aa076c4e486415a9f13facd707e0aba.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-3+4
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - Kalman Filter卡尔曼滤波器 Ch05-3+4 3. Step by step : Deriation of Kalmen Gain 卡尔曼增益/因数 详细推导4. Priori/Posterrori error Covariance Martix 误差协方差矩阵 3. Step b
![[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-1+2](https://img-blog.csdnimg.cn/direct/1eb0c3c819a841db808d26d9f452f2ab.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-1+2
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - Kalman Filter卡尔曼滤波器 Ch05-1+2 1. Recursive Algirithm 递归算法2. Data Fusion 数据融合Covarince Matrix协方差矩阵State Space状态空间方程 Observation观测器 1. Recursive Algir

无迹卡尔曼滤波(Unscented Kalman Filter, UKF):理论和应用
无迹卡尔曼滤波(Unscented Kalman Filter, UKF):理论和应用 卡尔曼滤波是一种强大的状态估计方法,广泛应用于控制系统、导航、机器人等领域。然而,传统的卡尔曼滤波假设系统是线性的,而在实际应用中,许多系统具有非线性特性。为了解决这一问题,无迹卡尔曼滤波(Unscented Kalman Filter, UKF)应运而生,它通过采用无迹变换来处理非线性系统。 线性卡尔曼滤波

扩展卡尔曼滤波(Extended Kalman Filter, EKF):理论和应用
扩展卡尔曼滤波(Extended Kalman Filter, EKF):理论、公式和应用 引言 卡尔曼滤波是一种广泛应用于估计动态系统状态的技术,但当系统的动态模型或测量模型是非线性的时候,传统的卡尔曼滤波方法就显得无能为力。扩展卡尔曼滤波通过引入非线性系统的雅可比矩阵,弥补了这一不足,成为处理非线性系统估计的有力工具。本文将介绍扩展卡尔曼滤波的理论基础、数学公式,并通过Python代码示例
详解卡尔曼滤波(Kalman Filter)
1. 从维纳滤波到卡尔曼滤波 黑盒(Black Box)思想最早由维纳(Wiener)在1939年提出,即假定我们对从数据到估计中间的映射过程一无所知,仅仅用线性估计(我们知道在高斯背景下,线性估计能达到克拉美劳下界,是最优估计)来掩盖我们的无知。 但是,到了二十年以后的1960年卡尔曼的年代,我们对于红框内的事(prior knowledge),很有可能是知道的,并且知道得很详细,很清楚
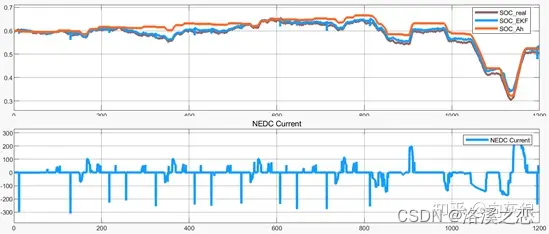
浅析锂电池保护板(BMS)系统设计思路(四)SOC算法-扩展Kalman滤波算法
1 SOC估算方法介绍 电池SOC的估算是电池管理系统的核心,自从动力电池出现以来,各种各样的电池SOC估算方法不断出现。随着电池管理系统的逐渐升级,电池SOC估算方法的效率与精度不断提高,下面将介绍常用几种电池SOC估算方法[1],本文主要介绍扩展Kalman滤波算法(Extended Kalman Filter,EKF)。 2 EKF算法 Kalman 滤波要求系统状态方程和量测方程都是线性
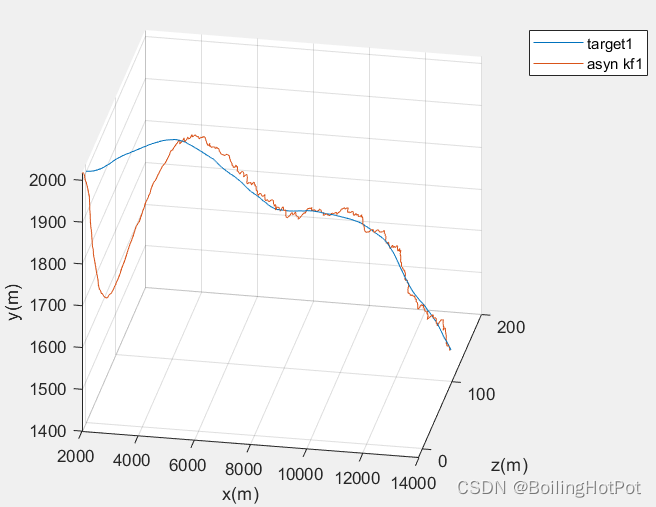
Kalman滤波、扩展Kalman滤波、无迹Kalman滤波和异步滤波的原理及其Matlab代码
目录 引言Kalman滤波代码及其结果展示 扩展Kalman滤波代码及其结果展示 无迹Kalman滤波无迹变换无迹Kalman滤波代码及其结果展示 异步无迹Kalman滤波原理代码及其结果展示 引言 本文给出了Kalman Filter(卡尔曼滤波)、Extended Kalman Filter(扩展卡尔曼滤波)、Unscented Kalman Filter(无迹卡尔曼滤波)

论文解读--Robust lane detection and tracking with Ransac and Kalman filter
使用随机采样一致性和卡尔曼滤波的鲁棒的车道线跟踪 摘要 在之前的一篇论文中,我们描述了一种使用霍夫变换和迭代匹配滤波器的简单的车道检测方法[1]。本文扩展了这项工作,通过结合逆透视映射来创建道路的鸟瞰视图,应用随机样本共识来帮助消除由于道路噪声和伪影造成的异常值,以及一个卡尔曼滤波器来帮助平滑车道跟踪器的输出。 1.介绍 多年来,高速公路上的司机安全一直是人
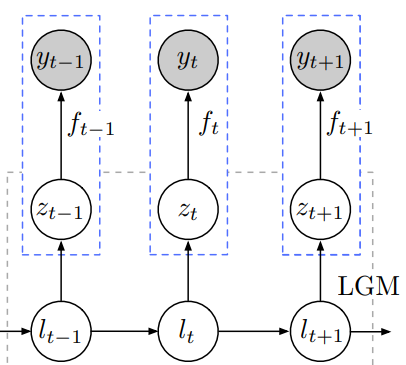
Normalizing Kalman Filters for Multivariate Time Series Analysis
l l l means latent state,LGM means ‘linear Gaussian state space models’ 辅助信息 作者未提供代码

【目标跟踪】基于Kalman滤波跟踪运动目标matlab代码
1 简介 在智能监控系统中,通过帧差法对运动物体的识别,定位,利用卡尔曼滤波算法对目标运动进行预测,跟踪,从而控制摄像头转动,跟踪目标物,使目标物体始终出现监控画面的中心.在此采用卡尔曼滤算法,进行目标运动的预估,利用Matlab对其仿真.仿真结果显示跟踪效果非常好,证明采用该算法来跟踪动目标物有效可行,具有一定的研究价值. 2 部分代码 %使用卡尔曼滤波方法对飞行航班进行轨迹预测%数

【李群李代数】【manif 】基于固定信标的2D机器人定位 (Error State Kalman Filter)...
demo演示 运行结果 我们考虑一个机器人在平面上被少量的准时地标或_信标 包围。 机器人以轴向速度和角速度的形式接收控制动作,并且能够测量信标相对于其自身参考系的位置。 机器人位姿 X 在 SE(2) 中,信标位置 b_k 在 R^2 中, | cos th -sin th x | * X = | sin th cos th y | //位置和方向